基于视觉辅助的大蒜幼苗破膜机的研制与试验
2024-01-10施国英王化琴李天华李玉华吴彦强
施国英,王化琴,李天华,李玉华,吴彦强
(1.山东农业大学机械与电子工程学院,山东 泰安 271018;2.山东省创新发展研究院,山东 济南 250000)
0 引 言
大蒜是厨房中很好的调味品,是天然的植物广谱抗生素,因此市场需求极大。目前,大蒜在播种、收获等方面的机械化研究已进入快速发展阶段[1-2]。然而,大蒜播种后为了保持地温、防止土壤水肥流失、抑制杂草生长,需覆盖一层地膜,蒜芽破膜现在仍以人工为主,相关破膜机器的研究仍处在空白阶段[3]。
覆膜大蒜在出苗后,要想正常生长,首先要顶破覆盖的地膜,传统方法主要是人工钩膜、人工拍膜、人工拉膜。人工钩膜是用铁钩钩破薄膜,并将蒜芽掏出,工作量大,强度高,且薄膜破口较大,影响保温保湿效果;人工拍膜是用扫帚在薄膜上拍打,帮助蒜芽破膜,蒜芽损伤率较高;人工拉膜是将麻袋、链条平铺在薄膜上,然后人工拉动达到蒜芽破膜的目的。这些破膜方式虽然效率高,但对蒜芽都有一定破坏。
本文提出了一种基于视觉辅助的链条拖曳式大蒜幼苗破膜机,操作简单,实用性强,可以很好地减轻蒜农的工作强度,提高作业效率,增加大蒜破膜质量,很大程度上减轻了劳作对地膜的破坏。
1 结构及工作原理
1.1 整机结构
大蒜幼苗破膜机主要由履带式底盘、可折叠破膜装置、视觉辅助装置、远程遥控装置及控制系统组成,如图1 所示。

图1 大蒜幼苗破膜机结构图
1.2 工作原理
覆膜蒜栽种以后,一般在蒜苗芽尖长到1~2 cm时,坚硬度完全能够顶破地膜。但这个时候,如果地膜铺得太松,或者田里一些泥土颗粒太大,导致刚出芽的大蒜没能够及时顶破地膜,就应该帮助蒜苗破膜了。首先将固定在底盘上的破膜装置折叠部分展开,控制步进电机连接的滚动轴转动,缓缓放下纱网与包裹棉布的链条,直至平铺在塑料薄膜上。履带式底盘沿着相邻两片薄膜之间的间隙运行,链条在薄膜上拖动,薄膜向下的压力随着链条的靠近而增大,蒜芽向上的支撑力也随之增大。当支撑力大于塑料薄膜的强度极限,蒜芽冲破薄膜。当链条通过蒜芽与薄膜的接触点时,蒜芽周围的薄膜也在链条作用下向下滑动至蒜芽的基部,固定在与土壤接触的位置。摄像头实时获取车况信息并传输到手机APP。通过手机可灵活调整机器运行方向,避免压到蒜芽;破膜工作完成后,控制滚动轴反向转动,慢慢将纱网卷起,最后将折叠架收起,机器恢复到开始的状态。用户根据种植幅度的不同,还可通过折叠架满足1~3 畦蒜芽的破膜需求。
2 关键部件设计
2.1 履带式底盘
大蒜播种后的土壤经过灌溉和充分渗透后变的泥泞和松软,普通轮式底盘在田间行走下陷严重。为提高整机的通过性,采用了履带式底盘,如图2 所示,主要由拖带轮、导向轮、支重轮、履带、行走直流电机等组成[4-6]。
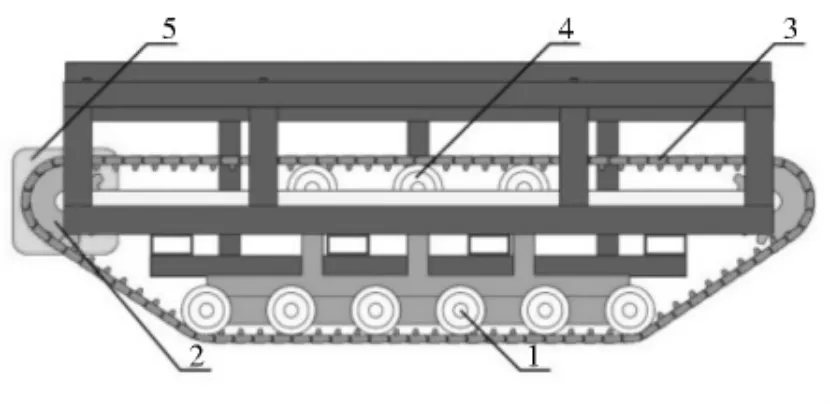
图2 履带式底盘
2.2 可调式破膜装置
可调式破膜装置主要由滚动轴、折叠架、支撑架、万向节、万向心、滚动步进电机、传动链、破膜链条、纱网等组成。折叠架和滚动轴之间的连接如图3所示。滚动轴和折叠架均分为3 段,每段长2 m,3 段滚动轴通过万向节和万向心连接在一起,并与轴承结合固定在上下两层折叠架中间。滚动轴的转动可实现破膜机构的上卷和下放,通过折叠架的收放,提高了机器适用范围。纱网的一端包裹链条,外面包裹棉布;另一端固定在滚动轴上,可满足高效破膜及减少薄膜与蒜芽损伤的要求。
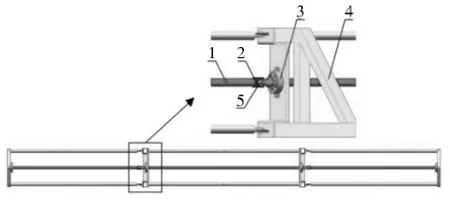
图3 可调式破膜装置
2.3 可调式车架
为了适应不同的畦田,设计可调式车架。车架平台与履带架通过限位螺栓连接,可以通过调节限位螺栓,改变两侧履带架的中心距以满足不同农艺要求,如图4 所示。
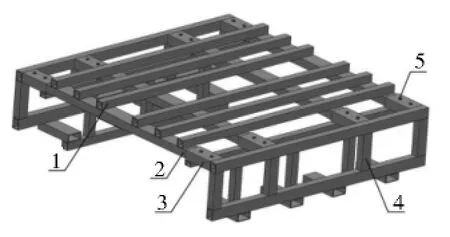
图4 可调式车架三维结构示意图
3 控制系统
如图5 所示,大蒜破膜机控制系统主要由电源模块、Wi-Fi 模块、视觉辅助装置、远程遥控装置、STM32F103 处理器、电机驱动器、步进电机和直流电机组成[7-8]。视觉辅助装置中的摄像头固定安装在云台上,通过Wi-Fi 模块完成数据通信。手机APP 可以实现对摄像头的水平和垂直方向调节,从而实现对作业状况的立体式监控;通过遥控装置可向处理器发送转向、调头、纱网收放等指令,完成破膜作业。
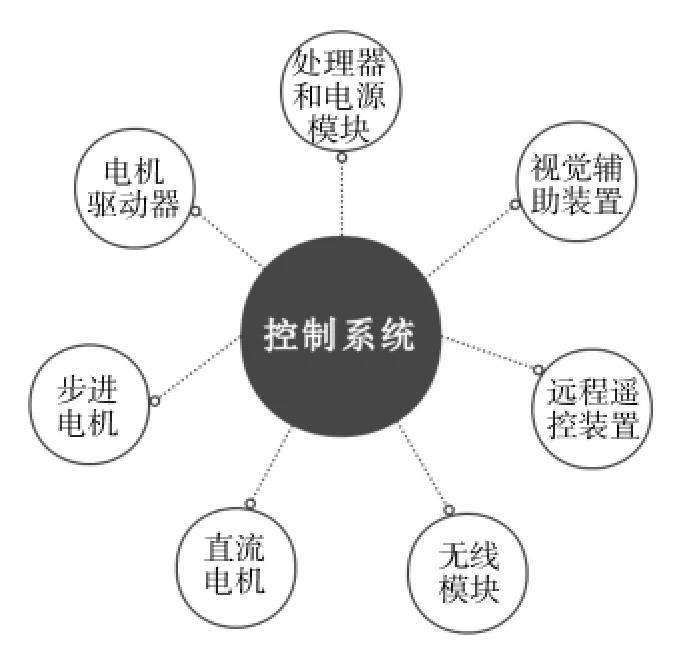
图5 控制系统结构
4 田间试验
4.1 试验关键因素
链条拖拽式破膜受整机行进速度、链条质量、链条类型等因素影响,本实验主要研究以上不同因素对破膜效果的影响,以获得最优的破膜评价指标参数。
实验选择不同参数的链条进行对比试验,如表1 所示,其中10 mm-L 代表直径为10 mm 的不锈钢长环链条,10 mm-S 代表直径为10 mm 的不锈钢短环链条。依据人工破膜速度(1.0~1.5 m/s)将机器前进试验速度分别设置为1.0、1.5、2.0、2.5、3.0 m/s。

表1 试验链条型号
4.2 试验方法
试验选用8 种不同类型的链条,每条链条长2 m,每3 根链条组成一组,分别固定在纱网的末端。蒜田每一畦的长度为50 m,分为5 段对应5 种不同的前进速度,依次进行破膜试验,统计不同链条和速度下的破膜情况。每次统计不同链条在相同条件下的蒜芽200 颗,计算蒜芽破膜数和弯曲、折断等损伤数,得到蒜芽破膜率、损伤率、相对损伤率和完好率。在不同试验畦里重复试验3 次,取平均值得到最终结果。图6 所示圆圈标注为在破膜过程中受损的蒜芽,其余为正常破膜的蒜芽。

图6 蒜芽破膜效果统计样本图
4.3 试验结果分析
蒜芽破膜数记为m,蒜芽损伤数记为n,Q1为大蒜破膜率,Q2为蒜芽损伤率。计算公式如下:
4.3.1 最佳破膜条件分析
(1)分析不同链条参数和不同速度下蒜芽的破膜率和破损率,如图7 所示。由图7(a)可知同一链条速度在2.5 m/s 和3 m/s 时蒜芽破膜率最高,在1 m/s 时最低,且随着链条质量的增加破膜率也逐渐上升。图7(b)说明在同一速度时,8 mm-L、8 mm-S、10 mm-L 和10 mm-S 链条下的蒜芽破膜率相对较高,且随着速度的增加而逐渐增加,但增速较慢。图7(c)说明相同的链条在3 m/s 的速度下,蒜芽损伤率最高。图7(d)说明在相同的速度下,采用10 mm-S、10 mm-L 链条时蒜芽的损伤率高于其他链条。由以上分析可知,破膜最佳链条为8 mm-S,最佳作业速度为2.5 m/s。

图7 不同参数下的破膜结果分析
4.3.2 人机破膜效果对比
人工破膜多选用6 mm 不锈钢长环链条和1.5 m/s 的前进速度,机器选用8 mm 不锈钢短环链条和2.5 m/s 前进速度。人机田间破膜实际操作对比如图8 所示,对应的数据分析如图9 所示。
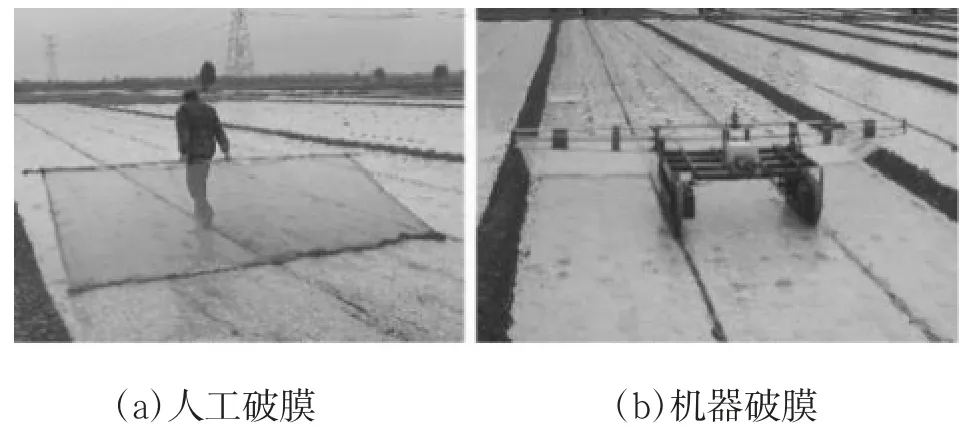
图8 人机田间破膜试验
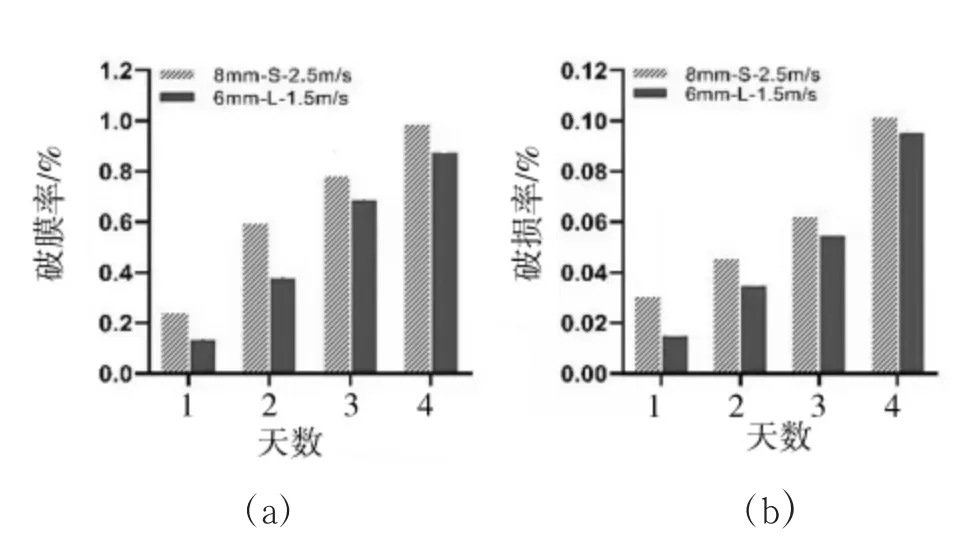
图9 机器破膜与人工破膜对应的数据比较
因每畦大蒜出芽时间不一致,所以需要进行多次作业。由图9(a)可知,8 mm-S 链条作业速度为2.5 m/s 条件下的蒜芽破膜率始终大于6 mm-L 链条作业速度为1.5 m/s 时,最终蒜芽破膜率比人工高10.5%。从图9(b)可知,在6 mm-L 链条作业速度为1.5 m/s 条件下的蒜芽损伤率始终比8 mm-S 链条作业速度为2.5 m/s 的低,但随着破膜天数的增加,两者之间的损伤率差距越来越小。考虑破膜幅度与速度,机器破膜作业效率为5.4 hm2/h,人工破膜效率为2.16 hm2/h,机器破膜效率约为人工的2.5 倍。
5 结 语
针对大蒜种植破膜环节无机可用的现状,研制了一种基于视觉辅助的链条拖拽履带式大蒜幼苗破膜机,履带式底盘解决了机器田间行走时的下陷和打滑问题;折叠式的支架可满足1~3 畦蒜芽的破膜作业需求;视觉辅助装置和远程遥控的结合,降低了劳动强度,提高了工作效率。
通过对破膜数据的整体分析、关键设备的选型及工作参数的优化,确定最佳破膜链条为8 mm 不锈钢短环链条、最佳作业速度为2.5 m/s,对应蒜芽破膜率为98%,蒜芽损伤率为9%。机器破膜的破膜率比人工破膜提高10.5%,蒜芽损伤率基本相同,整体破膜效果优于人工破膜;机器破膜作业效率为5.4 hm2/h,约为人工的2.5 倍。