植保无人机关键技术与发展趋势
2024-01-10沈朝萍李继伟朱莉凯
沈朝萍,李继伟,朱莉凯
(江苏航空职业技术学院,江苏 镇江 212134)
0 引 言
丘陵山地占据我国土地面积的70%左右,具有地形起伏多变、地势落差大、田块碎小等特点,地面植保机难以在丘陵山地内无障碍通行,推广应用受限,导致丘陵山地农业机械化水平低。植保无人机作为一种新型植保方式,具有速度快、效率高、灵活适应各种地形等特点,可以完成对农作物的自动化喷洒,有效解决不同作物长势、水田和丘陵山地的植保难题,节省植保过程中的能耗和农药损耗[1]。
1 植保无人机结构
1.1 无人机主体
广泛使用的多旋翼植保无人机主体结构如图1所示,植保机作业过程中,将多旋翼无人机主体结构与植保机喷杆喷雾技术有机结合,利用电气控制系统对无人机飞行状态和农药喷洒状态精确控制,实现高效的农业植保作业[2]。

图1 植保无人机主体结构
1.2 主要硬件系统
植保无人机的硬件系统架构图见图2,包括传感器模块、遥控模块、飞行控制模块、动力模块、喷洒模块和电源模块。
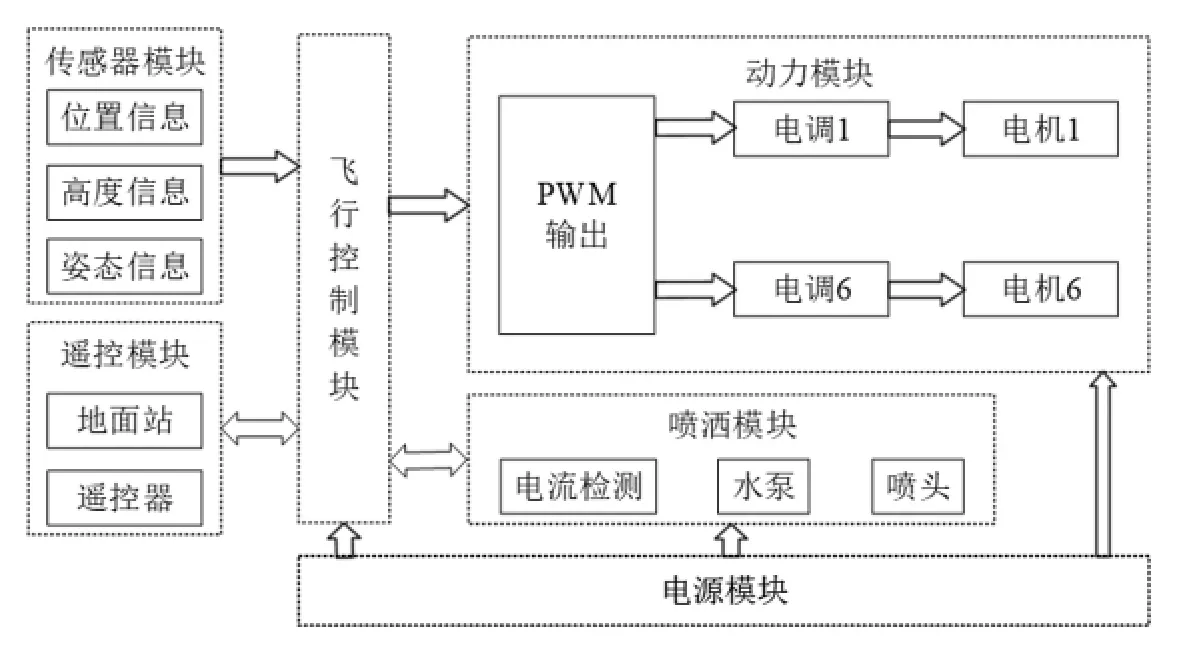
图2 植保无人机硬件系统架构图
1.2.1 传感器模块
传感器模块能够实时测量和感知植保无人机的位置、高度和姿态信息。传感器模块包括多种传感器,有陀螺仪、加速度计、地磁计、气压高度计、毫米波雷达以及GPS/北斗等感测设备。在植保无人机作业过程中,传感器模块采集的数据首先经过滤波处理,再由处理器将来自不同传感器的数据融合在一起,完成无人机姿态和位置的解算[3]。为了提升植保无人飞机的功能多样性,还可以增加双目相机、深度相机、激光雷达、空速计等感测设备,以完善无人机的地图构建智能路径规划以及避障等任务。
1.2.2 遥控模块和飞行控制模块
遥控模块发出指令指挥飞行控制模块,飞行控制模块负责姿态稳定控制、手动/自主飞行、任务和路径规划。飞行控制系统是无人机的核心,管理信息传递、模块通信和控制。飞行控制系统处理传感器数据,响应遥控器指令,控制电机改变无人机的姿态和位置。根据喷洒任务和实地状况,调整喷洒量。同时,飞行控制系统实时与遥控器和地面站通信,确保操作员了解无人机的飞行状态。
1.2.3 电源模块和动力模块
电源模块主要负责给动力装置、飞行控制模块以及喷洒模块供电。电池容量是限制植保无人飞机续航时间的主要因素,较高电压和放电倍率可提供更大功率,可以通过增加电机数量或采用高功率电机来增加无人机的负载能力。
动力模块包括螺旋桨、电机和电调。根据飞行控制指令来调整电机转速,从而控制机体的姿态、速度和位置。根据无人机的质量,确定轴距、螺旋桨数量、螺旋桨尺寸、电调规格和电池容量。这些参数可用于计算无人机的基本特性。然后,选择合适的开源飞控板、遥控器和喷洒模块,完成样机的组装。
1.2.4 喷洒模块
喷洒模块是植保无人机田间作业的核心组件,喷洒模块能够根据作业信息调整农药的喷洒速度。喷洒模块通常包括喷头、药箱、药泵、管道、流量传感器和液位传感器等,其中,喷头是关键组件,负责将农药液喷洒到植物上。喷头通常分为压力喷头和离心喷头。压力喷头通过压力泵将农药液体压力喷出,具有强大的穿透力,但雾滴粒径不均匀。而离心喷头则不同,离心喷头通过电机旋转产生离心力将农药液体甩出,雾滴粒径较均匀,但穿透力较弱,且使用寿命较短,易损坏。在实际应用中,需要综合考虑作物特性、无人机特性和农药品种,以选择适合的喷头类型。
此外,药箱、药泵和管道也是不可或缺的组件,药液经药泵加压后经管道输送到喷头,最终实现对农作物的喷洒。
2 植保无人机关键技术
2.1 定位导航技术
植保无人机定位导航系统是无人机的核心部件,提供姿态、速度、位置等信息。定位导航系统包括空中飞行器、地面监控站、地面控制器3 个部分。植保无人机在执行植保任务时需要特定的自主飞行能力,必须依靠定位导航系统的反馈来进行姿态控制。无人机定位导航的高精度和稳定通信对于植保无人机高效完成植保任务至关重要。
由于全球导航卫星系统(GNSS)容易受到应用场景的影响,在较复杂的环境下无法达到预期的定位效果[4]。因此,大多数实际应用将GNSS 与惯性导航系统(INS)[4]和实时运动学(RTK)[5]等其他技术结合起来,以提高整体定位精度和稳定性。面对精度、避障要求比较高的工况:大部分RTK 技术必须结合视觉传感器和雷达进行植保无人机定位导航。研究人员长期以来一直研究惯性导航系统(INS)/全球卫星导航系统(GNSS)用于植保无人机的定位和导航。
实际应用中,由于农业作业环境中风向和气流因素复杂,该方法可能会导致偏航(最大3 m,平均0.1 m)。因此,该方法在植保作业中性能不稳定。若是在丘陵山地,植保工作环境比田间更为复杂,优化系统中的硬件设备以增强抗干扰能力是该技术应用于丘陵山地植保无人机的研究方向。RTK 技术的发展对于GNSS 的实际应用具有重要意义[6],通过提高定位精度实现植保无人机精细化作业,见图3。目前,我国植保无人机主要应用RTK 技术进行定位导航,其中以大疆和极飞的植保无人机最具代表性,在市场应用中表现良好。

图3 RTK 工作原理
2.2 航迹规划技术
随着GIS 与GPS 技术的普及和传感器技术的发展,航线规划技术已成为植保无人机智能作业技术的基本组成部分。进行合理的作业路径规划可有效提高植保无人机的续航能力,降低对操控人员的技术要求,从而进一步提高植保无人机的作业效果和作业效率[7]。大多数植保作业区域都包含多重约束,对路径规划的快速解决有特定的要求。当前研究的重点是路线规划方法,该方法充分考虑了障碍物、复杂边界、多个操作区域以及药物和电池补充数量等多种约束条件。丘陵山地地形起伏,果树种植工艺不规范,导致果树冠层高度变化较大,径向和水平方向排列不均匀。因此,丘陵山地路径规划的约束条件更加复杂。大田定高作业路线不适用于丘陵山地,需要根据其作业环境因素进行三维路线规划。
由于单台植保无人机电池电量只能支持20~30 min 的连续作业,当面对多个作业区域或单个大作业区域时,设备需要频繁更换电池,并需要在区域和补给点之间频繁往返飞行,消耗有效作业时间。续航能力差是植保无人机在实际应用中面临的最大问题[8]。在大面积植保作业中,电池、液体、肥料等消耗品必须多次补给。
现阶段植保无人机航线规划的研究目标是缩短植保无人机航线总长度路线,减少能源消耗,减少补给次数,保证植保效果。此外,植保无人机作业环境如障碍物、复杂边界、地形变化等,在规划航线时需要根据实际情况综合考虑。学者们对单架植保无人机的航线规划进行了研究。在路径规划算法中,各种经典算法[8-10]被优化、改进并应用于路径规划,与未规划的植保无人机路线相比,有规划的植保无人机路线在总路线长度和无人机能耗方面都有显著改善。
与单架植保无人机相比,多架植保无人机可以实现多个作业区同时作业和单个作业区协同作业的工作。多台植保无人机协同作业是开展应急植保作业、多小区植保作业、防治突发病虫害的有效方式。可显著提高植保作业效率,有效保障农业健康生产。植保无人机集群航线规划实现多机协同作业受到学者广泛关注,植保无人机协同作业可应对农业生产突发情况,提高植保效率[11]。此外,多台植保无人机协同作业应充分考虑单台植保无人机的航线规划,在单台植保无人机效率最高的基础上,降低无人机集群作业的总能耗。目前,无人机集群协同路径规划常用的优化目标有最小能耗、最优路径、最短补给次数、最短时间等。
2.3 自主避障技术
无人机自主避障技术指的是无人机本身能够自主识别障碍物类型并完成指定避障动作的关键智能技术。对于植保作业而言,当田间作业环境光照不足或飞机与飞手之间的距离较远时,若主要依靠人肉眼观察判断,作业受限因素多且危险性高,因此,实现障碍物的自主识别和实时避障已成为植保无人机智能化发展的重要组成之一[12]。
从避障技术方面的研究可以看出,根据采用的传感器类型,目前应用在植保无人机的障碍物检测技术主要分为视觉检测技术(单目视觉和双目视觉)、毫米波雷达检测技术、超声波雷达检测技术、激光雷达检测技术及多传感器融合检测技术等。
图4 所示为激光雷达避障系统。植保无人机在飞行过程中,激光雷达传感器负责采集植保无人机周围环境信息,将所采集的环境数据以十六进制形式传输至中央控制系统。在中央控制系统内,对数据进行分析和处理。接着,指令将被传送至飞行控制系统,飞行控制系统将依据避障策略进行避障操作,将避障指令传达至电机,以调整电机转速,实施避障飞行。在已知环境情况下,任务规划可在地面站完成,将信号传输至飞行控制系统,实现飞行。为规避无人机在任务执行过程中受到不可控风险的影响,可添加遥控指令,以确保手动操作可用于无人机的降落或继续任务。
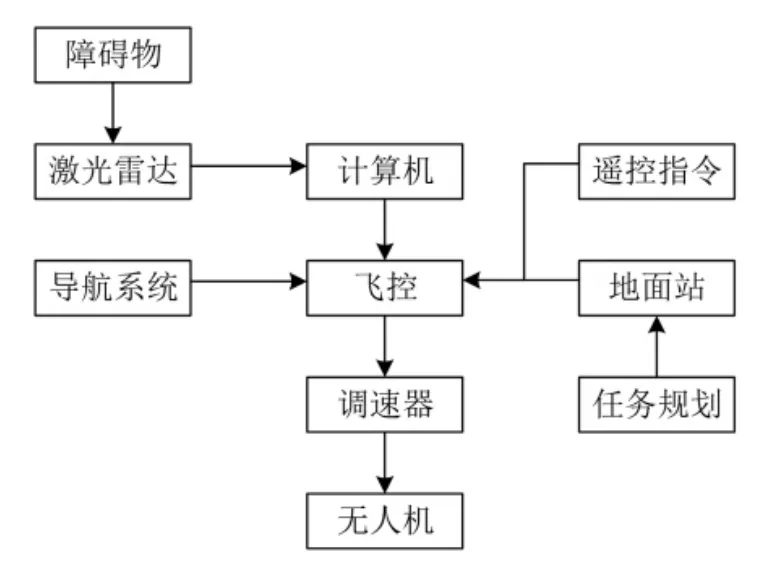
图4 各模块关系示意图
2.4 变量施药技术
精准施药过程包括3 个阶段:①信息获取阶段,获取喷施目标作物的生长信息及环境信息;②喷施优化决策阶段,对目标信息进行优化分析,确定实现精准喷施和理想沉积效果所需要的喷雾输出量和喷雾特征;③变量喷施实施阶段,根据以上2 个阶段给出的所需喷施量和喷施特征(如雾滴的速度和粒径谱),实施变量喷雾。
变量施药技术根据病虫害和杂草的程度实时调整施药量,以达到精准和需求导向的施药,包括GPS和变速流量控制系统。当前,国内多位学者已经研发出地面控制单元,通过无线数据传输模块实现了对喷洒模块的远程压力和流量控制,从而实现了无人机的变速喷洒调节。同时,通过算法的不断优化和系统的创新,结合神经网络预测模型,不断改进植保无人机的变速施药技术[13]。
3 发展趋势
3.1 多机协同作业技术
为了弥补单机作业难以满足人们对高效率生产的要求,多机协同作业技术在农用无人机行业应运而生。多机协同作业,即在单机作业的基础上,实现多架无人机智能联网,需要各无人机之间能够作为一个整体协调工作,有效覆盖大面积区域并进行信息交互与协同作业,提高植保无人机的作业效率。
3.2 喷洒减漂技术
由于越来越多的农田采用无人机进行管理,农药漂移对相邻作物和其他敏感区域的潜在影响也在增加。无人机喷洒农药漂移模型为评估喷洒任务的潜在风险和潜在缓解方法提供了一个连贯的框架[14]。随着测试中使用的设备和其他喷洒技术的不断更新,植保无人机喷洒沉积和漂移的相互作用需要深度研究。
4 结 语
根据目前的植保作业实践,植保无人机及其施药技术在不受作物长势和地势限制、提高作业效率、节本增效等方面具有不可替代的优势,在我国取得了极大的进步和应用。为保证植保无人机的健康发展和推广应用,需要深入研究多机协同作业与喷洒减漂技术,才能保证植保无人机飞行和植保作业的顺利进行,助力精准农业和智慧农业,实现乡村振兴。