基于ABMS的无人机编队协同制空任务效能评估
2024-01-10刘文金崔玉伟
刘文金,崔玉伟
(中国航空工业集团公司西安飞行自动控制研究所,陕西西安 710000)
0 引言
随着无人机相关技术的发展,其作战能力得到不断增强,在现代战场上发挥着重要作用。近年来,美军先后进行了X-47B 隐身舰载无人机、XQ-58A 隐身无人机以及“空中力量编组系统”(Airpower Teaming System,ATS)无人机等项目的研发,用于应对未来复杂战场中严峻的威胁挑战[1-2]。
在作战需求的牵引下,国内外开展了大量多机协同作战研究工作,如美国开发的“忠诚僚机”“分布式作战管理”和“拒止环境中协同作战”项目等,对不同任务背景下无人机协同技术进行了验证。除无人机项目外,相关研究还对多无人机作战体系概念、作战流程、关键技术需求和发展趋势等方面开展定性讨论和分析[3-7]。在此基础上,对多无人机在侦察监视、空对地打击等任务场景下的作战效能进行研究,但对于制空作战场景下的研究还相对较少。
在无人机协同作战效能评估方法上,目前多采用解析方法进行评估。文献[8]分析了有人/无人机的协同模式和运用规则,基于指数模型对多种编队形式进行评估。文献[9]采用多层次指标和灰色理论结合的方法,对有人/无人机协同反舰作战效能进行评估。文献[10]在ADC方法的基础上增加作战保障能力指标,研究了舰载无人机编队协同对海作战效能。采用该类方法能够快速得出评估结果,但对指标的评价大多基于专家经验,或是根据无人机平台战技指标给出某种函数进行计算,主观性较强。
而基于仿真的装备和任务效能评估方法受主观影响小。其中,基于Agent 的建模与仿真(Agent based modeling and simulation,ABMS)方法可有效构造具有自主性、反应性、交互性等特点的作战实体,并通过自底向上的方式对复杂系统的演化过程进行推演,在作战效能评估和装备方案顶层论证中已得到广泛应用[11-12]。如文献[13-14]采用有限状态机对Agent行为进行建模实现,对无人机在搜救任务、突防任务开展了仿真。文献[15]将ABMS方法用于多无人机海域监视的任务效能分析。文献[16]将ABMS与复杂网络模型相结合,研究了多无人机系统的指挥控制效能。文献[17]构建了综合规划架构并采用ABMS方法评估了空空导弹效能。
因此,本文基于ABMS 方法,通过分析无人机编队协同制空任务作战样式,构建以任务状态机为核心的Agent 模型结构,在此结构下,结合“观察—判断—决策—行动”(Observe-Orient-Decide-Act,OODA)循环思想对Agent 的功能和行为模型进行实现。最后,通过仿真得出评估结果,并对该任务场景下多无人机协同作战任务效能进行分析和讨论。
1 无人机协同制空任务构想
1.1 任务构想
制空作战是未来先进舰载隐身无人机的1项重要任务[18-19]。任务构想为红方舰载预警雷达、预警机发现来袭的蓝方目标或情报表明蓝方可能发动空中攻击后,由航母指挥无人机编队前往来袭方向执行空中截击的任务。其作战目标通常是挂载各类反舰导弹的轰炸机、挂载空空导弹/反舰导弹的战斗机、隐身战斗机以及无人机等。此类空中目标对红方水面作战力量、空中防御力量构成严重威胁。特别是隐身战斗机和隐身无人机,其利用自身低可探测性优势深入红方防区进行隐蔽侦察、目标识别等任务,可为后方作战力量提供大量战场情报信息,以便开展远程反舰火力投送等作战行动。因此,使用多架无人机组成编队,即时采取制空拦截行动,将对方战斗机、无人机等进行驱离或击毁,将是未来海空作战中非常重要的任务。无人机编队协同执行制空任务场景如图1所示。
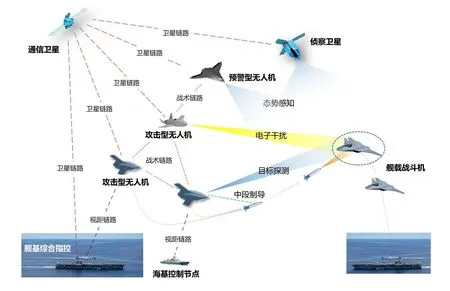
图1 无人机协同制空任务构想Fig.1 Conception of multi-UAVs cooperative air combat mission
在编队组成上,可由多架同构型的攻击型无人机组成编队,也可由不同数量的预警型无人机和攻击型无人机组成无人机编队,以适应不同目标类型、不同强度下的制空作战任务。
1.2 作战过程
多无人机协同制空作战过程可通过OODA 循环过程进行描述[20]。根据这一理论,无人机协同制空作战过程可分为目标探测、战场态势感知、任务规划和分配、任务执行、战效评估5个作战行动。为梳理各作战行动的具体内容、输入输出及关联关系,采用层次结构对协同制空作战行动样式进行分解,得到作战行动循环分解如图2所示。
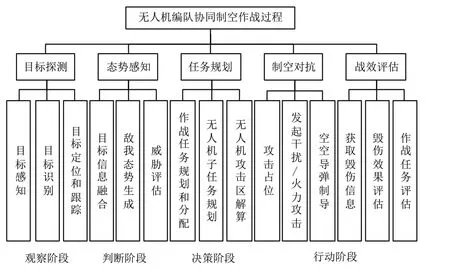
图2 无人机编队协同制空作战过程Fig.2 Collaborative air combat mission process of multi-UAVs
1)观察阶段。
通过无人机的机载相控阵雷达、光电分布式孔径系统、敌我识别装置等各类侦察探测装备在制空任务区域搜索探测目标信号,获取并保持对目标方位、速度、距离等状态信息的跟踪,并将探测到的目标信息汇总至负责指挥控制的后方指挥部。
2)判断阶段。
综合各机上报的目标信息,融合消解信息误差和冲突,形成统一的战场目标信息,完成目标识别;基于己方空中编队各作战力量的位置、当前作战能力等状态信息对威胁程度进行排序,生成统一的战场威胁态势,之后发送给编队内所有的无人机。
3)决策阶段。
无人机编队的任务指挥官根据统一战场态势中己方各作战飞机状态信息和目标威胁程度排序,进行协同作战任务规划,对不同目标分配针对性对抗措施。根据本次行动的作战任务,生成制空作战子任务序列,对无人机的协同模式进行设定,选定需要打击、跟踪、制导的目标并分配至各架无人机。
4)行动阶段。
无人机自行规划飞行航路,前往预定作战区域进行占位。期间,预警型无人机提供远距离的目标感知、定位和跟踪,为编队内所有无人机提供及时更新的态势信息,引导攻击型无人机前往拦截目标。攻击型无人机接近目标后对目标进行探测和确认,并做好导弹发射前准备与参数装订,实施攻击包线在线计算,确定目标不可逃逸拦截包线。在目标进入不可逃逸包线后随即发射导弹,对空空导弹进行中段导引至中末制导交班,随后脱离攻击区,返回原巡逻区域继续任务;此外,攻击型无人机若装备电子干扰装备,则在目标进入有效干扰范围后随即对目标实施干扰,以延迟目标对红方作战飞机和导弹的感知时间,延缓蓝方进行对抗的反应速度。
2 无人机协同作战仿真模型设计
2.1 Agent模型构建
研究中,装备实体主要有攻击型无人机、预警型无人机、有人战机以及空空导弹4 种。按装备类别可划分为飞机类和导弹类。考虑到飞机和导弹在探测、运动、通信等方面可采用相同或类似的数学模型进行构建,并通过配置速度、探测识别距离等性能参数进行区分,因此,采用相同的Agent模型结构见图3。
Agent 采用分层反应型模型结构,分为行为层和功能层。
在行为层,Agent设置了行为逻辑模块,行为逻辑基于OODA 循环思想进行设计,主要过程为“感知—规划—行动”,其中规划行为包括了判断和决策,由任务状态机进行实现。
在功能层,Agent设置了探测感知模块、运动模块和通信模块,每个功能模块可配置不同的功能模型,以满足飞机和导弹在功能上的差异性。例如,在探测感知模块中,飞机Agent需配置雷达告警模型,而导弹Agent 则无需配置此模型。对于每个功能模型,均可配置探测距离、巡航速度等装备性能参数,以满足不同机型之间的差异。
Agent通过行为层的行为逻辑模块可实现从环境中获取信息,并基于预定的规则采取相应行为;而功能层多个功能模块则用于支持Agent 各类行为的实现。
2.1.1 飞机Agent行为逻辑模块
1)攻击型无人机/战机Agent任务状态机。
红方的攻击型无人机和蓝方的战机在任务中功能和行为状态类似,包括探测、跟踪、追击、制导、毁伤评估以及威胁规避等,采用同构型的任务状态机进行行为实现,不同机型的性能差别通过参数设置进行区分,如图4所示。
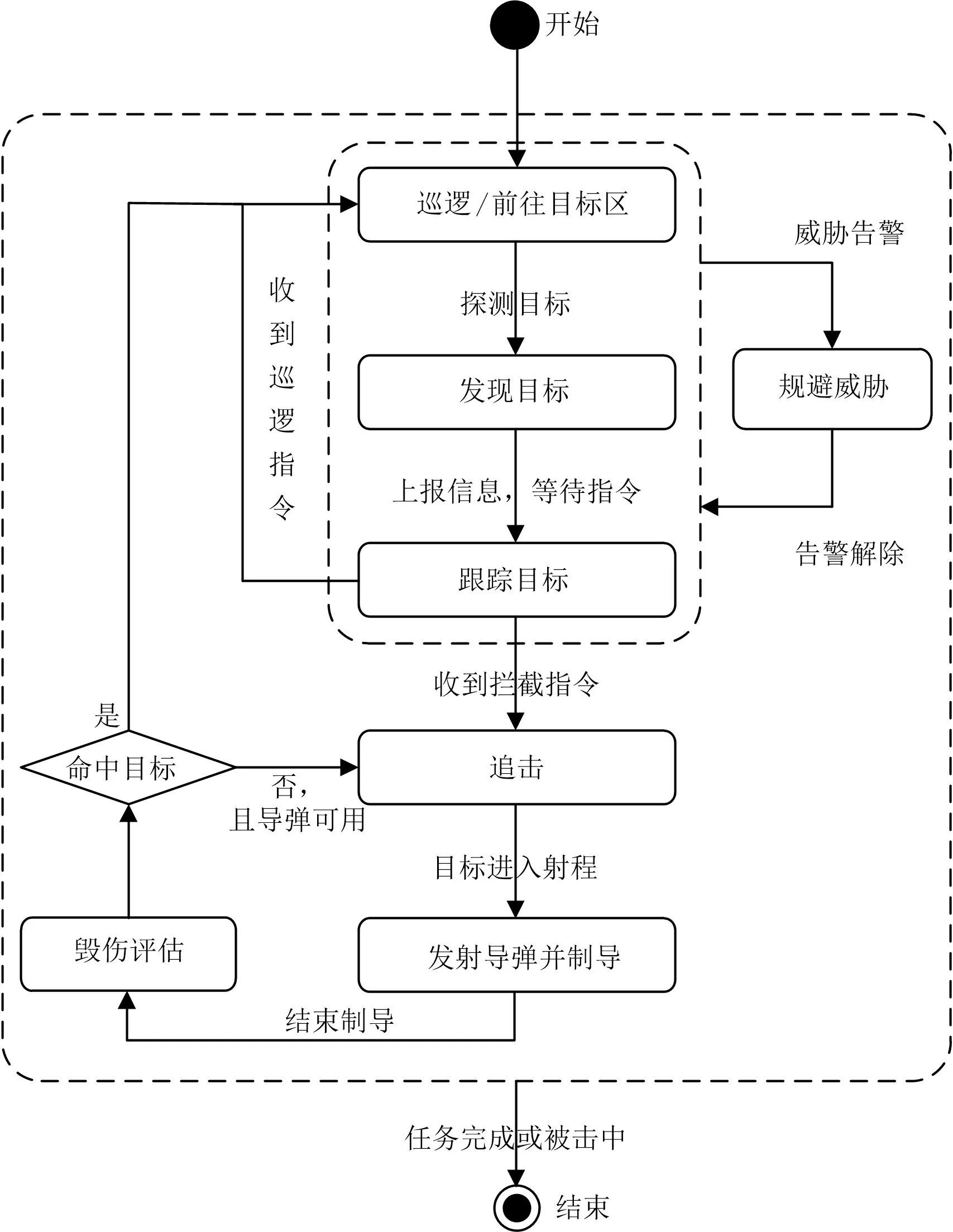
图4 攻击型无人机/战机Agent任务状态机Fig.4 Mission state machine of UCAV/fighter Agent
对于任何一方而言,其所有活动的飞机均会上报和共享获取的目标信息,再由编队指挥官根据战场态势指派距离威胁目标最近的攻击型无人机/战机对目标进行拦截。
2)预警型无人机Agent任务状态机。
预警型无人机Agent任务状态机在攻击型无人机Agent任务状态机的基础上,取消了追击、导弹发射制导等部分,其余保持不变。
2.1.2 导弹Agent行为逻辑模块
红蓝双方空空导弹的行为状态包括发射准备、初制导、中制导、末制导以及自毁和摧毁判定,如图5 所示。

图5 导弹Agent任务状态机Fig.5 Mission state machine of missile Agent
2.2 仿真参数设置
交战双方作战单位初始参数值如表1、2所示。
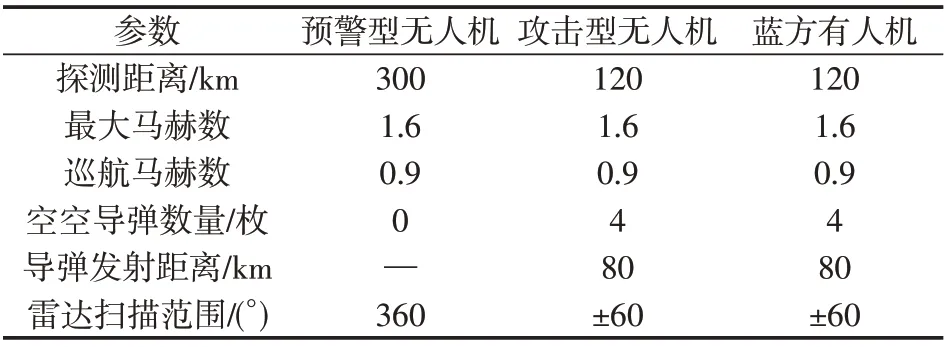
表1 飞机参数Tab.1 Aircraft parameters
表2 导弹参数Tab.2 Missile parameters
为确保导弹的命中率,考虑导弹的攻击包线,设置红方攻击型无人机和蓝方战机在锁定目标后最大允许发射距离为100 km,此处的最大允许发射距离是指在该距离下,无人机发射导弹后命中率不低于0.8。
2.3 模型场景
仿真任务场景设定为在某海域附近,红方获取的战略情报表明蓝方将派出舰载战斗机,对红方控制区域开展军事行动。红方决定派出无人机编队前往防御区域,执行巡逻警戒任务和制空拦截任务。交战双方任务区域设置为:红方防御区域位于红方航母编队前出400~450 km处;蓝方目标区域为红方航母编队前出200~300 km处。任务场景见图6、仿真界面见图7。
图6 任务场景Fig.6 Mission scenario

图7 仿真界面Fig.7 Interface of simulation
3 效能分析
3.1 无人机编队协同制空效能指标
分析无人机编队协同制空效能,首要考虑作战目标的完成度。文中无人机编队协同制空的任务目标是拦截蓝方飞机,因此设置第1项效能指标拦截率;此外,蓝方战机突防至距离红方舰队越近,对红方舰队的威胁越大,因此设置第2项指标为拦截距离。2项指标定义如下。
拦截率:被拦截的蓝方飞机与蓝方出动的总飞机数量之比。
拦截距离:蓝方飞机从起飞至被拦截或任务完成时与红方航母的最近距离。
在仿真时,对每个样本点进行2 000 次蒙特卡洛仿真,将统计指标均值作为结果。
3.2 无人机编队协同制空作战效能
3.2.1 情形一:攻击型无人机2对2拦截
设置2对2拦截情形:假设红方部署2架攻击型无人机,在防御区域内无人机沿平行航线进行巡逻警戒;若探测到蓝方飞机,则按2.1节所述功能和行为逻辑进行制空拦截作战,直至目标被击毁或自身被蓝方飞机击毁;若红方飞机完成制空拦截任务,则返回巡逻航线继续警戒。蓝方飞机出现的时间和方位随机,突防方向指向航母附近的一片区域内的随机点,时间、方位和随机点均采用均匀分布生成。
以无人机探测距离为变量,分析该值变化对多无人机协同作战效能的影响,如表3 所示。随着编队内每架无人机探测距离的增加,红方的拦截率和拦截距离呈先增大,然后基本不变的趋势。
表3 2对2情形下无人机探测距离对效能影响Tab.3 Impact of UCAV detection range on combat effectiveness in 2V2 case
可见,更大的探测距离使战斗/攻击无人机在OODA 循环上占据优势,可以发现更多且可及早对目标实施制空拦截,但受导弹攻击包线影响和限制,在无人机探测距离小于导弹的最大允许发射距离时,提升探测距离带来的效能增益明显;反之,即使无人机能够先探测到目标,但仍需飞行至满足导弹最大运行发射距离时才能攻击目标,此时探测距离提升带来的效能增益较少。
3.2.2 情形二:攻击型无人机多机编队拦截
设置攻击型无人机多机编队拦截情形:无人机探测距离为120 km,其中无人机编队组成分别为2、4、6、8 架制空型无人机,部署于距红方航母编队外围防御区域,蓝方目标仍为2 架战机,行动逻辑与情形一类似。
以编队内无人机数量为变量,分析该值变化对多无人机协同作战效能的影响,如表4所示。
表4 攻击型无人机编队中飞机数量对效能影响Tab.4 Impact of aircraft quantity on combat effectiveness in a team of UCAVs
可见,随着编队内无人机数量的增加,作战效能并非成比例增加。拦截率、拦截距离均出现先增加,后基本保持不变的趋势;无人机损失率出现先减小,后基本保持不变的趋势。
通过分析可知,编队中飞机数量在4 架时基本覆盖了整个任务区域,因此,再增加编队内飞机数量带来的效能值提升有限。
3.2.3 情形三:预警型无人机与攻击型无人机混合编队拦截仿真与分析
设置预警型无人机与攻击型无人机混合编队拦截情形:编队内包含1架预警型无人机,其余为攻击型无人机,行动逻辑与情形一类似。预警型无人机无对空攻击能力,对蓝方目标的探测距离为300 km。
分析不同编队情况下加入预警型无人机后对多无人机协同作战效能的影响,如表5所示。
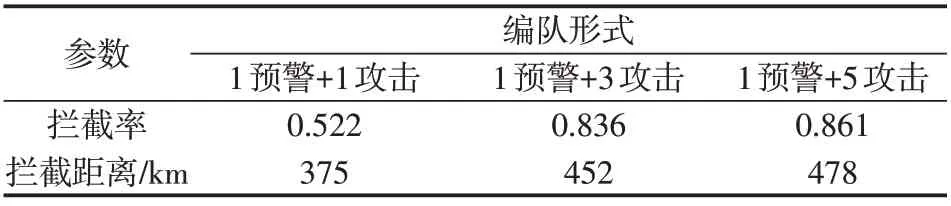
表5 预警型无人机加入编队后对效能影响Tab.5 Effect of early-warning UAV on combat effectiveness after being incorporated into formation
可见,预警型无人机加入攻击型无人机编队后,与出动同等数量的攻击型无人机组成单一机型的无人机编队对比,拦截率和拦截距离2 项效能指标均有所提高。经分析,“预警型无人机+攻击型无人机”的编队形式,尽管携带的导弹总数减少了,但预警型无人机的加入使探测识别距离得到显著提升,增加了OODA 环第1 个环节的能力,使得任务效能仍能得到提升,在本场景设定下,拦截率和拦截距离均提升了10%~20%。
综上,多无人机协同制空作战编队中,无人机探测距离、数量、编队编组形式等不同作战运用方式对任务效能有显著影响,但影响模式存在差异性:采用同构编组形式时,攻击型无人机探测距离的增加、编队内无人机数量的增加,均能提升多无人机编队协同制空任务效能,但受导弹性能限制或任务区面积限制而存在饱和值;此外,在攻击型无人机编队中加入预警型无人机,尽管降低了空空导弹数量,但探测感知距离的大幅提升使得编队整体受益,可使编队达到更高的任务效能。
4 结论
本文对多无人机协同制空作战任务和过程进行了分析,在此基础上构建效能评估指标,基于ABMS方法构建仿真任务场景进行研究,分析了典型制空任务场景下无人机探测距离、无人机数量以及编队组成形式对多无人机协同制空的效能的具体影响。结论可为无人机总体设计方案和多机编队作战使用策略提供参考。
