基于信息预处理的无人机集群协同电子侦察
2024-01-10杨富程宋伟健李立欣宋树成
杨富程,宋伟健,但 波,李立欣,宋树成
(1.海军航空大学,山东烟台 264001;2.西北工业大学电子信息学院,陕西西安 710072)
0 引言
近年来,无人机因其高移动性以及灵活的部署能力被广泛应用于商业、农业以及工业中[1-4]。无人机通过搭载电子侦察设备可被用作空中移动电子侦察网络,有效增强了电子侦察网络的性能以及覆盖范围[5-6]。在突发性的电子侦察网络介入场景中,传统的电子侦察车和电子侦察飞机使用不灵活、作用受限制,往往难以捕捉转瞬即逝的电子侦察信号。同时,电子侦察车只能在地面工作,其侦察路径受到路况的严重制约;大型电子侦察飞行的起飞受到严格限制,巡航高度通常6 000 m 以上,反射截面积大,易被发现。基于电子侦察需求的突发性和未来电子侦察需求的紧迫性,部署搭载电子侦察载荷的无人机网络成为有效解决电子侦察问题的高效方案并引起了广泛关注[4,7]。
无人机集群协同电子侦察可以综合考虑多个无人机平台的电子侦察结果,有效降低复杂电磁环境、干扰、衰落等对电子侦察结果的影响,增强检测结果的可靠性[8]。多平台电子侦察数据融合是无人机集群协同电子侦察的核心,但是传统单一的数据融合方法对复杂电磁环境考虑较少,使得联合电子侦察判决结果具有不确定性[9-10]。针对信息的不确定性,贝叶斯推理的方法依托先验概率,因而其局限性较大;模糊集理论通过将具有不确定性的目标对象通过隶属关系搭建函数,后续进行数据融合和分析,但是该方法不适用于非一致包含的交集情况且会降低判决精度。新兴的神经网络算法和遗传算法可以通过大量训练来对不确定信息进行预测和判决,但是算法复杂度高,计算成本也较高。基于证据理论(Dempster-Shafer,DS)的信息融合,不需要先验的数据信息,就可以快速有效处理随机性和模糊性所带来的不确定性信息的融合问题,并且可以根据证据值的不断积累,增加结果的准确度[11]。文献[12]对不同感知节点的电磁环境进行了比较,并将其作为证据来源的权重,可以有效减小不确定信息对信息融合带来的影响,提高检测性能。相较于单阈值,文献[13]将双阈值应用于DS数据融合算法,有效提升了局部信息的准确性。当观测环境信噪比低、存在虚警信号或通信信道衰落严重时,会导致证据冲突的情况,造成信息融合结果错误。基于原始数据进行算法优化可以在一定程度上弥补证据冲突带来的判决误差,但是对于大量高冲突证据情况,该方法局限性较强[14]。通过对数据进行预处理和加工后,再进行数据融合,该方法可以有效避免部分数据冲突,但是面临着数据收敛性差的风险[15-18]。
本文针对无人机集群协同电子侦察过程中存在的证据冲突现象,结合上述数据融合存在的问题,提出了1种基于单平台无人机电子侦察结果预处理的方法。通过数据筛选仅对可能存在冲突的数据进行修正,从而降低对正常数据破坏的可能性。仿真结果表明,该方法可以在较低的计算复杂度的前提下有效提升无人机集群协同电子侦察的效果,可靠性高,鲁棒性强。
1 系统模型
无人机集群协同电子侦察系统模型如图1所示。
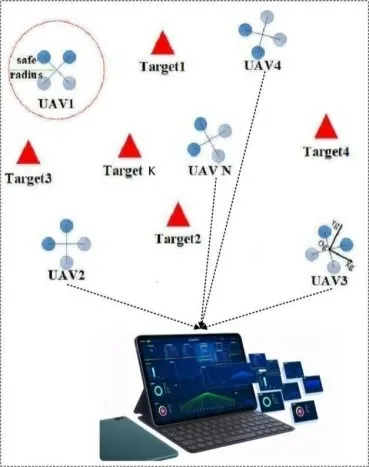
图1 无人机集群协同电子侦察结构示意图Fig.1 Schematic diagram of UAV cluster collaborative electronic reconnaissance structure
在无人机协同电子侦察网络中,假设L架无人机平台搭载电子侦察设备进行感知,在第t时刻各个平台的观测模型为:
式(1)中:xl(k)为第l个无人机平台收到的电子侦察信号;sl(k)为被侦察辐射源的信号;hl和nl(k)为对应第l个无人机平台的信道增益和背景噪声。
通过能量检测的方法对辐射源进行判别,得到第l个无人机平台的能量检测信号为:
式(2)中:N=2TW为采样个数,T为检测时间,W为信号带宽的乘积。当采样个数足够大时,能量检测信号xEi可以近似表示为高斯分布,即:
式(3)中:均值分别为μ0i=N和μ1i=N(1+γi);方差分别为σ0i=2N和σ1i=2N(1+2γi);γi为信噪比。
无人机平台将电子侦察结果传递给无人机集群数据融合中心,在数据中心的数据统计可以表示为:
判决中心处的全局判决变量可以表示为D,
1.1 基于传统DS证据理论的无人机集群协同电子侦察
在无人机集群协同电子侦察网络中,DS 证据理论的识别框架可以定义为Θ={}H0,H1,Ω,其中Ω代表信息的不确定性或冲突性[16]。对于单无人机平台的电子侦察信息,利用高斯函数构建其基本概率分配(basic probability assignment,BPA)函数为:
利用传统的DS合成公式融合无人机集群的电子侦察信息BPA值:
式(9)(10)中:Al⊆Θ,l=1,2,…,L。
概括来说,该方法可以分为本地电子信息预处理和无人机数据中心的信息融合。
1.2 无人机电子侦察信息预处理
第l架无人机电子侦察信息的静态权重可以通过对比无人机集群中电子侦察信号的信噪比进行设置:
相应修正后的第l架无人机电子侦察信息BPA值为:
在此基础上,进一步计算不同无人机电子侦察信息之间的相互支持度,从而更加精准地获得信息权值:
式(15)中:l=1,2,…,L;k=1,2,…,L;A∩B≠∅。
相应地,所有无人机平台电子侦察信息与第l架无人机电子侦察信息支持度总和可以表示为:
第l架无人机电子侦察信息的绝对可信度可以表示为:
经过归一化的第l架无人机电子侦察信息的相对可信度可以表示为:
无人机集群中共有L架无人机进行协同电子侦察,将L架无人机平等对待,则每架无人机相应的权重为1L。如果第l架无人机电子侦察信息crd_rell≥1L,视为正常数据;否则,视为冲突信息。
新的信息加权方法在确认冲突数据后,仅对冲突信息进行修正,这样可以保持对冲突数据的有效修改和对非冲突数据的有效保护。基于信息的静态加权系数和相对可信度,修正系数可以表示为:
式(19)中:λ是比重值,可以用来调节2 种加权系数,从而改变2种权重度修正系数的比例影响。
修正后的加权系数可以有效降低冲突数据对证据合成结果的影响。
1.3 无人机集群判决中心数据融合
将所有无人机平台的电子侦察结果进行预处理后,加强了本地电子侦察信息的可靠性,为下一步的数据融合和联合判决提供了更加可靠的信息依据。为避免在信息融合过程中出现因信息悖论而造成的归一化失败的情况,最终协同电子侦察判决变量可以表示为:
最终比较msum(H1) 和msum(H0)的大小和最终判决门限η进行最终判决,即:
以上为无人机集群协同电子侦察证据预处理方法信息融合的具体步骤,该方法的具体思想是先判断出所有点侦察数据中的冲突数据,并对冲突数据修正,再利用基于证据预处理的合成公式来对修正后的感知数据进行信息融合。
该方法可以在证据悖论问题存在时,提高检测性能,增加鲁棒性,提高协同电子侦察联合判决的准确度,并且可以针对冲突数据进行校正,避免了修改原始正常数据带来的未知风险。
2 仿真分析
本节采用蒙特卡洛方法和MATLAB 软件对无人机集群协同电子侦察的过程进行仿真验证。将电子侦察信息预处理的信息融合算法应用于无人机集群协同电子侦察。本算法不依赖任何先验信息的支持,所以,除无人机自身电子侦察结果外,无需其他信息输入。为了验证和比较所提算法的可行性,依据传统无人机组网的方式进行了建模,电子侦察载荷进行自主判决并将结果集中至信息融合中心进行联合判决。
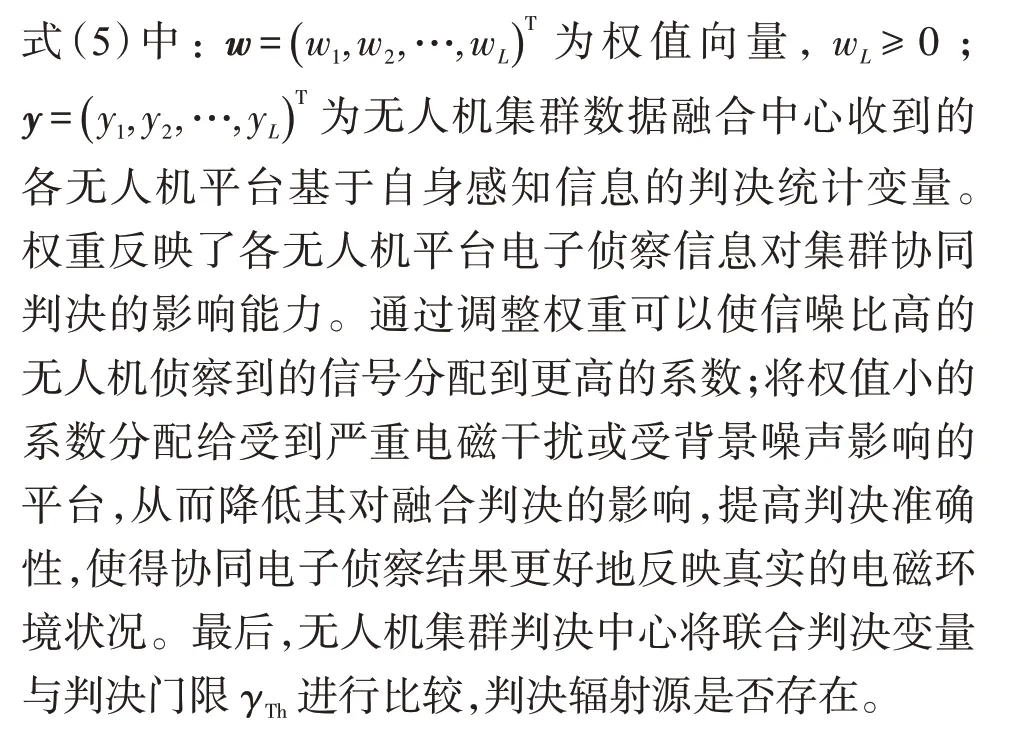
图2 中,在50 km×50 km×10 km 的空间中随机分布100 个辐射源,无人机集群搭载电子侦察载荷对该区域进行电子侦察。无人机搭载电子侦察载荷的有效感知距离为0.5 km。每个无人机平台将自身的电子侦察结果发送给指挥中心,假设分别采用了5架、8架、10 架无人机搭载电子侦察载荷对辐射源进行监测和感知,电子侦察的信噪比由0 dB升至20 dB,联合判决的结果分别由传统的证据理论和基于信息预处理的信息融合方法获得。通过仿真结果我们可以看到,随着电子侦察信噪比的提高,相应的无人机集群信息融合可靠性也显著提升。增加无人机平台的数量可以有效克服单平台电子侦察可靠性低的缺点,提升协同电子侦察效率。但是,随着无人机数量的增加,无人机集群系统的成本和复杂度也呈指数增加。
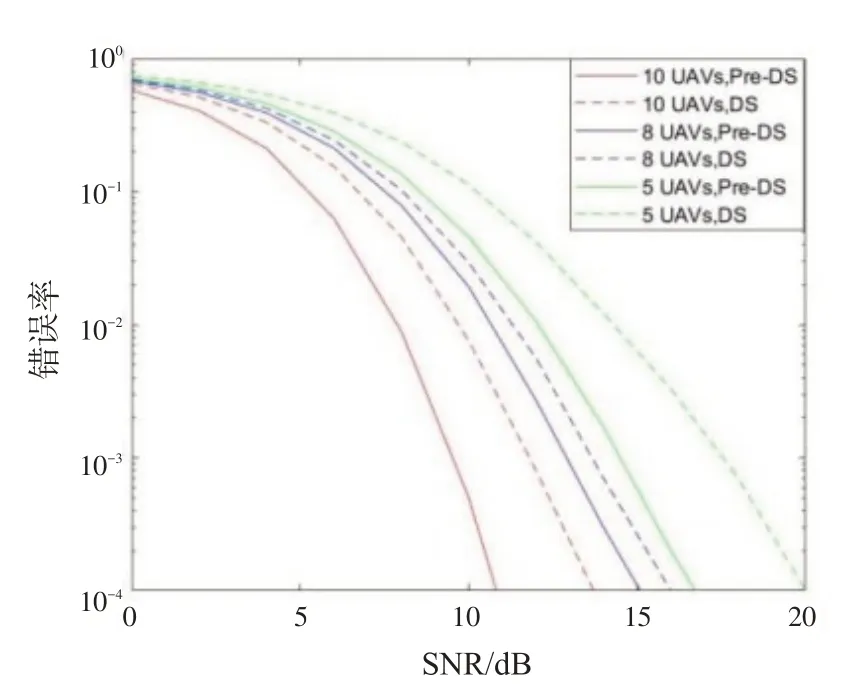
图2 不同信噪比下无人机集群协同电子侦察错误率Fig.2 Error rate of UAV cluster collaborative electronic reconnaissance under different signal-to-noise ratios
图3 中,各无人机通过搭载电子侦察载荷对侦察区域内的电磁环境进行感知判决。仿真过程中,假设共有6 架无人机平台对辐射源进行判决,每架无人机搭载的电子侦察载荷性能一致且单平台的判决概率相等。无人机通过空中通信网络将判决结果传送至联合判决中心进行判决,信噪比由3 dB升至15 dB,相应的联合判决准确性明显提升。通过仿真结果可以看出,电子侦察载荷的性能和通信信道的质量对无人机集群协同电子侦察的联合判决性能均有明显影响。
图4 中,无人机集群协同电子侦察的效果在高信噪比的侦察环境下有明显提升,同时通过设置合理的信息预处理权值βl可以得到相对最佳的协同电子侦察可靠性。仿真过程中,假设共有5 架无人机搭载电子侦察载荷对辐射源目标进行协同电子侦察,值得注意的是,在仿真过程中,假设每个电子侦察载荷性能相同且电子侦察环境的信噪比也相同。仿真结果显示:在电子侦察环境信噪比为10 dB的情况下,修正系数βl值为1.4时,对应最佳联合电子侦察结果;相对应地,当电子侦察环境信噪比为5 dB时,修正系数βl值为0.6时,无人机集群协同电子侦察效果最佳。
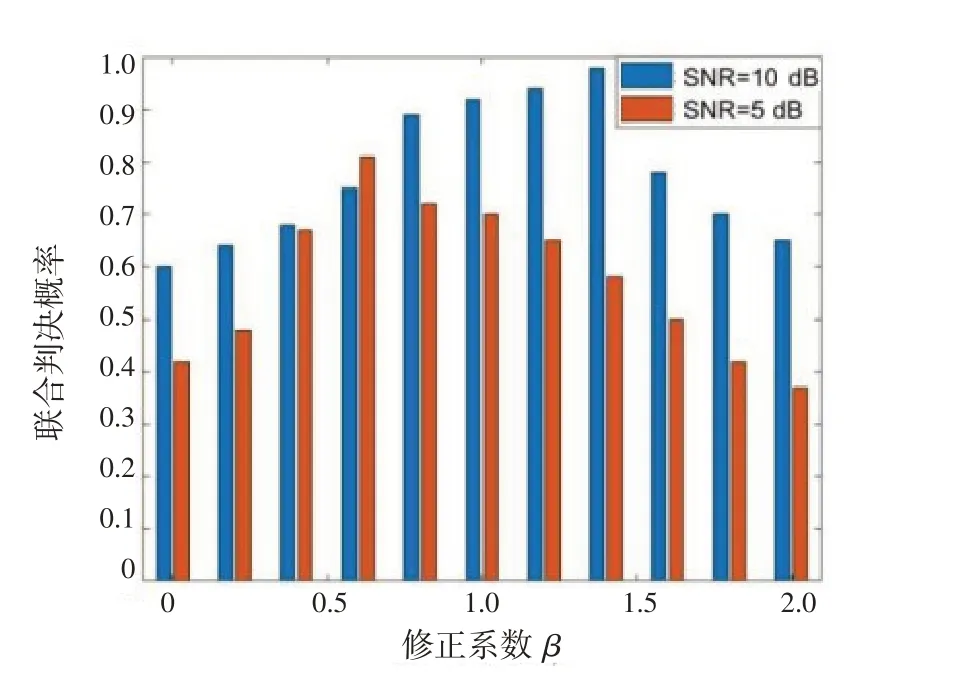
图4 不同修正系数下无人机集群协同电子侦察判决概率Fig.4 Probability of UAV cluster collaborative electronic reconnaissance decision under different correction coefficients
3 结论
本文将信息预处理技术应用于无人机集群协同电子侦察任务中。基于信息预处理技术的协同电子侦察算法不依靠任何先验信息,在不增加系统复杂度和成本的条件下可以实现协同电子侦察效果的有效提升。该算法能够更好地根据实际情况调整修正系数的数值,使该模型下的无人机集群协同电子侦察效果达到最佳。对传统的DS算法和基于信息预处理的协同电子侦察算法进行了仿真实验比较,分析了在不同噪声环境、不同数量电子侦察平台等条件下,对系统性能产生的影响:联合判决性能受到电子侦察噪声影响明显,增加无人机平台和电子侦察载荷数量可以有效提升协同电子侦察效率。通过仿真,验证了在相同单平台电子侦察判决率的情况下,基于信息预处理的无人机集群协同电子侦察算法可以获得更高的联合判决可靠性。
