三维激光扫描技术在地铁隧道验收测量中的应用
2024-01-09陈志里林金标
陈志里,林金标
(福建省地质测绘院,福州 350011)
0 引言
地铁隧道工程是现代城市交通建设中的重要组成部分,其安全性与稳定性对于保障城市交通顺畅运行至关重要。地铁隧道的验收测量是确保隧道质量合格的重要环节,传统的全站仪、经纬仪及测量机器人等测量手段存在着测量精度低、工作效率不高等问题。随着科技的不断发展,三维激光扫描技术作为一种新兴的测量技术被广泛应用于地铁隧道验收测量中,其能够通过激光扫描装置快速获取地铁隧道内部的点云数据,相比传统的验收测量方法具有测量速度快、测量精度高、非接触式测量等优势,可全方位、全景式地记录地铁隧道内部的实际情况,实现对各个部位的精确测量,为地铁隧道验收工作提供强有力的技术支持[1-3]。
三维激光扫描系统测量原理是利用发出的激光脉冲束照射物体对物体表面进行扫描,记录下每个位置激光的发射及反射时刻,通过记录光传播时间计算出激光束传播路径的距离及间距,根据接收激光束返回的反射波水平与垂直方向的偏向值得到物体表面各个位置的三维坐标信息。如图1所示,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直,获得P点坐标[4]。

图1 三维激光扫描测量点坐标原理Fig.1 Coordinate schematic of 3D laser scanning measuring points
本研究对已有文献进行整理及案例分析,探讨三维激光扫描技术在地铁隧道验收测量中的具体应用,研究结果对提高地铁隧道验收测量的可信度及效率、提升其应用效果及地铁工程建设的安全与质量起到积极的促进作用。
1 工程实例分析
1.1 测区概况
实验对象为A市某条轻轨线路,全长23 km,目前已完成大部分施工工作,需对已建设完成部分进行竣工验收测量,由于隧道内环境复杂,加上整体时间紧、任务重,传统测量方式难以满足应用要求,故拟采用三维激光扫描仪对隧道进行点云扫描,基于点云数据进行隧道断面测量、隧道中心线提取及偏差分析,为验收工作提供数据基础。整体技术路线如图2所示。
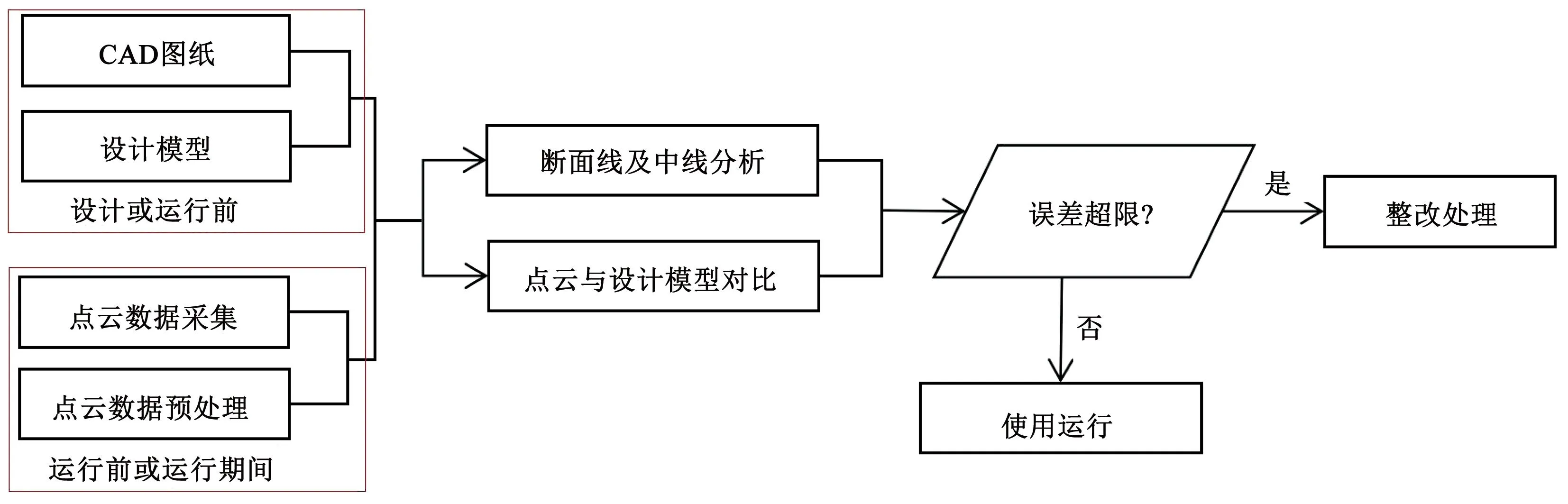
图2 整体技术路线Fig.2 Overall technical route
获取前期准备数据,包括CAD图纸及设计模型的相关资料,应用三维激光扫描仪进行点云数据采集及预处理,基于点云数据进行断面线及中线提取,对比CAD设计数据,获取断面偏差。基于点云与设计模型进行偏差对比,获取模型整体及细节部分偏差,如果误差超限则进行偏差区域整改处理,如果符合精度规范要求则验收通过。
1.2 外业数据采集
应用三维激光扫描技术进行隧道点云数据采集时,在激光扫描前需确定要扫描的隧道区域范围,根据实际情况选择合适的激光扫描仪和扫描参数,如扫描角度、分辨率等。将激光扫描仪固定在适当位置,启动设备进行数据扫描操作。激光扫描仪会发射激光束,扫描整个隧道内的物体表面,通过不断改变扫描方向及角度获取周围物体的三维坐标信息。需要注意的是,由于隧道环境复杂(如光线较暗、空气湿度高等),可能会对扫描效果产生一定的影响,在数据采集中需及时检查数据结果,若发现数据异常需要重新扫描。实验共架设5个测站,呈一字型,从测区开始部位进行逐站扫描,不同测站间布置一定数量靶球,方便后期点云拼接处理[5]。
1.3 点云数据预处理
点云数据采集完成后还需进行点云拼接、点云去噪、点云抽稀及坐标转换等内业处理。应用Trimble RealWorks软件对点云数据进行预处理,选择要导入的点云数据文件,调整扫描设置,如扫描颜色、密度、强度等级等,获取最佳的数据可视化效果,方便观察处理。由于导入的点云数据来自于多次扫描或不同位置的扫描,需进行数据配准处理,确保数据之间的一致性及准确性。Trimble RealWorks提供了自动和手动配准工具,根据外业布设的球形靶标(共同特征)进行配准。配准完成后进行点云去噪处理,人工去除非目标点云数据,如人、移动硬件及缆线等,使用滤波器(如高斯滤波器、中值滤波器等)来平滑数据,使用去离群值工具删除异常点。由于采集的点云数据量较大,需基于目标点云特征(弧形)进行精简处理,预处理后的点云数据如图3所示。可以看出,预处理后的点云数据完整,无明显点云缺失情况[6]。

图3 预处理后的隧道点云数据Fig.3 Pre-processed tunnel point cloud data
1.4 验收测量分析
隧道验收测量分析主要从两个方面进行:断面、中线与设计线画图对比分析,点云与设计模型碰撞分析。进行隧道点云断面测量及中线提取,将预处理后的隧道点云数据导入到Trimble RealWorks中,创建剖面线,在工作栏中选择剖面选项,再选择创建剖面线,根据隧道的具体几何特征,在点云数据中选择合适的区域,绘制隧道剖面线。可使用直线、曲线及多边形等工具来描绘剖面线。指定剖面线的间距及密度,选择剖面选项中的测量工具,软件根据所选剖面线在点云数据上绘制出相应的断面,提供测量结果,如剖面的宽度、高度、曲率等,根据需要进行多个断面的测量,剖面线提取完成后,选择剖面选项中的提取中线工具。根据所选剖面线,Trimble RealWorks会自动计算出隧道的中心线,根据需要对提取结果进行微调和修正。将处理好的结果导出为CAD软件格式,对比隧道设计二维图纸,获取偏差数据。隧道断面和中线提取效果如图4所示[7]。

图4 隧道断面线及中线提取Fig.4 Extraction of tunnel section and center line
点云与设计模型碰撞分析是一种将点云数据与数字设计模型进行比较,以检测在实际现场环境中设计模型与实际点云数据之间可能存在的冲突或碰撞的过程,通过碰撞,对比发现并解决设计与实际施工之间的差异,确保设计的可行性及施工的准确性。碰撞分析在Trimble RealWorks软件中进行隧道点云与设计模型的偏差对比,将完整的隧道点云数据导入到Trimble RealWorks软件中,将隧道BIM设计模型文件导入其中,在应用软件中使用坐标系匹配工具将点云数据与设计模型的坐标系进行匹配,确保两者在空间中的位置及方向一致,设计模型文件与隧道的几何及结构特征相匹配。选择对比选项,设置对比类型及参数,如相应的容差值及颜色显示,以区分偏差值的大小和方向。Trimble RealWorks会自动执行对比分析,将结果显示在点云数据及设计模型上。还可以根据需要调整显示设置和颜色编码,以更清晰地显示偏差信息。如图5所示,根据对比分析结果可获取详细的偏差值、偏差分布图等[8]。

图5 设计模型与点云碰撞分析Fig.5 Design model and point cloud collision analysis
通过两个角度对比后应用,得到实验区域施工成部分误差均在合理范围内,能够满足应用和运营要求。
2 结束语
介绍了三维激光扫描技术原理及优势,探讨了在地铁隧道工程中应用三维激光扫描技术进行点云数据采集的具体步骤及方法,分析了其在地铁隧道建设中的应用效果。实验结果表明,该技术在地铁隧道工程中的应用对提升地铁工程质量及安全起到了积极的推动作用。
