柔性机械手抓取动作运动仿真分析*
2024-01-09王熙杰
□ 王熙杰
湖南铁路科技职业技术学院 铁道机车学院 湖南株洲 412006
1 分析背景
随着当前机械手控制技术的快速发展,应用领域得到不断拓展,要求机械手能够灵活适应各类外形工件的控制过程。如何提高机械手对物体的适应能力,提高机械手柔性,成为开展智能机器人技术研究的一个重要方向[1-2]。
在现有各类机械手中,采用专用机械手能够很大程度提高抓取效率,但专用机械手的适用范围很小,缺乏良好的适应能力[3]。多指灵巧机械手可以适应多种外形结构的物体,但是需要设置大量关节,并对各关节分别开展控制,这样才能完成复杂的驱动模式,由此导致整体处理成本提高,进而制约应用范围[4]。
根据当前工业机械手的研究情况,优化机械手结构及简化驱动方式,已经成为目前的关键研究内容。为满足当前工业领域的应用需求,开发一种具有简单结构与驱动模式,成本低,能够快速推广的柔性机械手,成为机械手领域的重要研究方向[5]。
利用流体抽充方式能够控制抓取动作,在抓取过程中,手指对各外形物体不同的触碰力会造成机械手腔压力改变,进而实现手指驱动运动过程,直至所有手指都与物体保持贴合状态。机械手能够自主根据物体外形结构进行调整,极大扩展机械手对不同外形物体进行搬运与分拣的使用范围,有效克服当前机械手结构过于复杂,无法有效适应各类外形工件混合抓取的不足[6]。
当前一般以仿造人手方式来设置灵巧机械手,其制备材料主要为金属材质,可以实现很大的刚度。通常以电机、气缸、液压动力来实现驱动功能,通过综合运用铰链、齿轮等来实现多种复杂运动过程,确保动力被传输至机械手关节部位,由此达到驱动手指关节的效果[7]。
2 建模
2.1 软件介绍
采用SolidWorks软件Motion模块来模拟装配体运动过程。这一模块提供高效的动力算法,计算过程中同时考虑材料综合性能与惯性因素,可以准确完成各项计算。结合计算结果,绘制得到对应曲线,作为后续分析依据。也可以利用上述方法精确模拟装配体运动状态,再合成运动算例单元。
2.2 机械手三维模型
对柔性自适应机械手的运动过程开展仿真,考虑到机械手中存在部分不能运动的零件,因此进行运动仿真过程中需要对不能运动的零件进行简化处理。组成各根手指的弹簧与硅胶套也属于不可变形的零件,会对手指指节转动过程造成制约,因此进行运动仿真时忽略这两个零件,只保留各手指的指尖与指节结构,直接接触抓取对象。对运动仿真机械手装配结构进行保存,由此构建得到三维模型。机械手三维模型如图1所示。

图1 机械手三维模型
2.3 参数
构建运动仿真场景时,需要在装配体文件中按照参数指标加入机械手与被抓取对象,同时绘制一个平面零件,作为托住抓取对象的基础。仿真机械手为柔性结构,确保机械手所有关节都可以完成运动过程,然后将抓取对象设置于合适区域,形成固定平面后,等待机械手实施抓取操作。设置机械手运动特征,针对全局结构设置引力,控制方向朝下的状态,并将引力数值设定为与重力一致。为抓取对象和平面设置实体接触及线性阻尼,从而控制抓取对象在平面处保持静止。进行运动仿真,得到机械手抓取的仿真结果。
机械手抓取运动模型如图2所示。
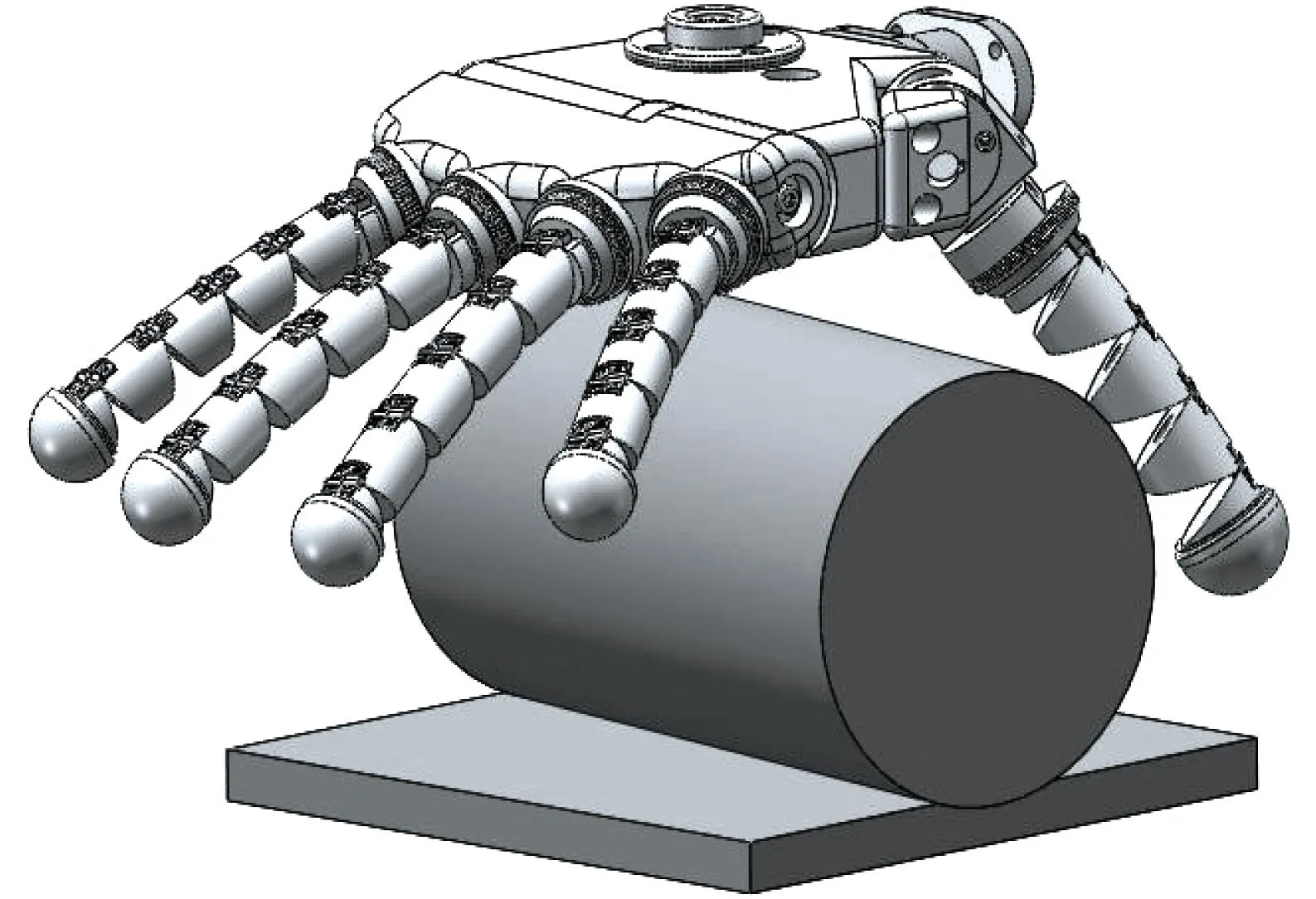
图2 机械手抓取运动模型
在手指、大拇指根部与掌心的关节处安装旋转马达,利用旋转马达动作来模拟手指在负压下发生弯曲的状态。保持旋转马达处于等速控制状态,将速度设定在0.6~0.9 r/min之间。在模型中加入手指指节和抓取对象接触组,确保手指与抓取对象发生接触时不会造成穿透的问题,使手指能够稳定地控制抓取对象。选择铝和铁作为接触材料,在保持10.2 mm/s速率的条件下,进行动态摩擦测试,设置摩擦因数为0.2。选择恢复接触的模式,设置恢复因数为0.2。
3 运动仿真分析结果
在仿真平台配置参数后,进行柔性机械手抓取运动仿真。以位移作为结果分量,特征面包括指尖与指节侧面,得到每根手指中各个关节对应的线性位移结果。
最终获得五指指尖线性位移结果,如图3所示。通过运动仿真分析,可以直观观察到机械手的运动过程,同时也能够获得各项参数指标。对五条指尖线性位移曲线进行分析,可以发现各手指都形成了平滑过渡的位移曲线,表明各指运动过程中都实现了平稳的运动速度。

图3 指尖线性位移结果
随着抓取的进行,各个手指的运动规律特征一致,均基本表现出单调减小的变化规律,可见均进行了抓取动作,并且各个手指的动作是同步进行的。
通过横向对比五指指尖线性位移结果可以发现,中指指尖形成最大移动距离,之后为食指、无名指、小拇指指尖,移动距离最小的是大拇指指尖,这与实际手指对圆形物体的抓取特点一致。此外,所有手指都形成了相似的线性位移变化趋势,表明各个粗细与长度不同的手指都保持相近的运动控制稳定性,可以判断机械手达到了很高的稳定性。根据指尖位移曲线具有同样的停止时间可以判断,五个手指的接触过程存在先后顺序,先接触手指控制抓取对象的移动,直至各个手指都与抓取对象保持接触并达到稳定后,抓取状态才发生停止。通过分析运动仿真结果,可以清晰观察到机械手对物体进行抓取的控制过程。
在手指出口形成负压后,气体从手指内部抽出,此时手指内部形成低于外部大气的压力,表现为被大气作用后形成挤压状态。同时各关节间发生相互转动,形成更小的空腔体积,并与出口负压保持平衡。硅橡胶外表与手指指节保持贴紧,再与指节共同发生变形,随着手指不断弯曲,与抓取对象间形成更短的距离[8]。
手指不同关节间保持连接状态,构成手指主体结构。手指关节外部采用弹性硅橡胶作为包裹物。在硅橡胶和手指关节间设置密闭容腔,同时对手指指节开设圆孔,利用圆孔连接外部区域,再利用气体压入与抽出方式来调节手指的弯曲和伸直。
4 结束语
笔者开展柔性机械手抓取运动仿真分析,通过运动仿真,能够非常直观地观察到机械手的运动过程,获得各项参数指标。在抓取运动过程中,中指指尖形成了最大移动距离,之后为食指、无名指、小拇指指尖,移动距离最小的是大拇指指尖。