基于CFD 的槽道推进器对AUV 水动力性能的影响研究
2024-01-09关英杰崔庆佳边有钢秦晓辉
关英杰,崔庆佳,2,徐 彪,2,边有钢,2,秦晓辉,2
(1. 湖南大学 机械与运载工程学院 整车先进设计制造技术全国重点实验室,湖南 长沙 410082;2. 湖南大学无锡智能控制研究院,江苏 无锡 214115)
0 引言
自主水下机器人(autonomous underwater vehicle,AUV)是一种能够在水下独立工作的机器人,被广泛应用于海洋科学研究、海洋资源勘探、搜索与救援、海洋环境监测以及海洋安全与国防等领域[1]。水动力模型对评估AUV的性能、预报其运动状态以及控制系统模型搭建等方面具有重要作用[2]。
对水下航行器的水动力研究一直以来都是一个研究难点和热点,常用的研究方法包括试验流体力学方法、理论流体力学方法以及计算流体力学方法。试验流体力学方法主要包括约束船模试验和航行试验等,但其测试周期长、试验成本高,且约束船模试验方法存在尺度误差的问题。理论流体力学方法主要通过流体力学理论和经验公式相结合进行分析,如小展弦比理论和细长体理论等,但理论流体力学较难对复杂模型进行水动力辨识。计算流体力学(computational fluid dynamics, CFD)方法的发展相对较晚,但随着计算机技术的进步,其优势逐渐凸显。通过CFD 方法进行水动力辨识具有周期短、成本低,并且容易揭示流动细节等优点。因此,使用CFD 方法对水下航行器进行水动力研究具有明显的优势。
潜艇作为发展较早的水下航行器,其水下动力学理论为现代水下航行器的水动力学建模提供了研究基础。在针对潜艇的水动力研究中,一些学者已经取得了一系列成果。其中,文献[3]通过Spalart-Allmaras 湍流模型计算潜艇定常流动黏性流场和水动力,分析了不同部件对总体水动力的贡献程度。此外,还有研究关注了潜艇在不同工况下的水动力特性,如纵向位置对水动力的影响、连续冰脊下的水动力耦合特性、斜航操舵水动力及绕流流场数据预报以及尺度效应对直航操舵水动力性能的影响等[4-7]。
然而,针对AUV 的水动力研究方面,尤其是槽道推进器对AUV 水动力性能影响的研究还较为有限。因此,本文通过CFD 方法对具有槽道推进器和无槽道推进器的AUV 两种模型进行了水动力性能研究。旨在探讨槽道推进器对AUV 水动力性能的影响,为改善AUV 的水动力学性能和运动控制提供理论基础[8-12]。
1 AUV水动力模型
研究AUV的运动时,必须建立表达运动的坐标系。本文所使用的坐标系及六自由度运动定义如图1所示。AUV的6个自由度包括3个平移运动(纵荡、横荡和垂荡)和3 个旋转运动(横滚、纵摇和艏摇)。各自由度运动的水动力、速度和加速度系数符号如表1所示。

表1 六自由度运动系数符号Tab. 1 Symbols of the six-degrees-of-freedom motion parameters

图1 AUV 的大地坐标系和随体坐标系Fig. 1 Earth-fixed and body-fixed coordinate systems of AUV
AUV在水中运动时,其动力学模型由刚体动力学模型和水动力学模型2部分构成。
在随体坐标系下,AUV的六自由度动力学模型可被描述为
式中:M—— AUV 的惯性矩阵;C(v) —— AUV 的科氏力和离心力矩阵;D(v) —— 水动力阻尼矩阵;g(η)——重力和浮力组成的恢复力矩阵;v——AUV的速度矩阵;̇——AUV 的加速度矩阵;η——大地坐标系下AUV 的位置及姿态向量;τ——控制输入矩阵,代表执行器6个自由度下对应的力或力矩。
AUV 的横滚运动主要受到AUV 的稳心影响,推进器对其影响较小,不能作为可控的运动自由度。通常可以忽略横滚运动对AUV的影响,可以将水动力模型简化为[10]
式中:Xu̇、Yv̇、Zẇ、Mq̇、Nṙ—— 不同自由度的惯性类水动力系数;Xu、Yv、Zw、Mq、Nr—— 不同自由度的黏性类线性水动力系数;Xu|u|、Yv|v|、Zw|w|、Mq|q|、Nr|r|—— 不同自由度的黏性类非线性水动力系数。
2 几何模型与网格划分
为分析槽道推进器对AUV水动力性能的影响,需要构建用于CFD计算的几何模型,并划分计算网格。
2.1 几何模型
本文研究对象AUV 如图2 所示,构建了2 个外形尺寸相同的模型,图2(a)的AUV1为常规艇型,图2(b)的AUV2 布置有槽道推进器。其中,L= 2 080 mm;L1=180 mm;L2=1 180 mm;L3=1 052 mm;D=200 mm;D1=100 mm。

图2 AUV 结构和尺寸Fig. 2 Structure and dimensions of AUVs
2.2 网格划分
不同于传统的动网格方法,本文使用重叠网格方法,不必担心负体积网格的产生。重叠网格需要2套计算网格(前景网格和背景网格)。重叠网格划分策略如图3所示。

图3 重叠网格划分策略Fig. 3 Strategy for overlapping grid partitioning
计算网格使用多面体非结构网格,相对结构化网格,非结构网格对模型适应性更高。非结构网格没有规则的拓扑结构,也没有层的概念,网格节点的分布是随意的。对于复杂外形的体表面,网格生成相对容易。非结构网格主要分为四面体网格和多面体网格,多面体网格相对四面体网格,其消耗计算资源少,计算成本更低。
在水下航行器研究中,重叠网格技术[13]和多面体非结构网格[14-15]已有一些应用,可靠性得到了一定的验证。本文最终选择的网格如图4所示,图2(a)和图2(b)中AUV的体表面网格分布分别如图4(a)和图4(b)所示,背景网格使用的网格单元相对较粗,前景网格的网格相对较细,对近AUV 体表面的网格进行了局部加密,并在AUV表面添加了边界层网格。

图4 AUV 表面网格Fig. 4 Surface mesh of AUVs
3 CFD模拟方法
本研究分别使用三维不可压缩流动的定常和非定常计算方法对AUV的平移和旋转运动进行CFD模拟。控制方程为不可压缩流体的连续性方程和动量守恒方程。
连续性方程为
动量方程(x方向):
动量方程(y方向):
动量方程(z方向):
式中:ρ—— 流体的密度;u、v、w—— 速度分量;P—— 压力;t—— 时间;(x,y,z)——空间坐标;μ——动力黏度。
式(3)~式(6)描述了质量守恒和动量守恒。对于三维定常流动计算,上述方程中的时间项可以被忽略。
k方程描述了湍流能量的输运和产生过程:
式中:ui—— 不同维度的流体速度;μt——湍流黏度;σk——经验常数;k——湍流动能;ε——湍流能量的耗散。
ε方程描述了湍流涡度的输运和耗散过程:
式中:σε、C1、C2——经验常数。
通过求解式(7)和式(8),可以得到流场中湍流能量和湍流涡度的分布情况,从而预测湍流的流动情况。
4 CFD计算过程及结果
使用上述的计算网格模型分别计算AUV 的平移运动和旋转运动,并通过最小二乘法拟合获得AUV的水动力系数。
4.1 惯性水动力系数计算
惯性水动力系数反映了AUV 的变速运动产生的水动力情况。通过对AUV变速度平移运动和旋转运动的模拟,进而拟合获得惯性水动力系数。
4.1.1 平移运动计算
分别通过纵荡、横荡和垂荡3 种变速直线运动的数值模拟,对平移运动的惯性水动力系数进行求解。
由于AUV1 模型相对x-y平面和x-z平面具有对称性,因此其横荡和垂荡运动产生的水动力是相同的。需要计算5种工况,分别为AUV1的纵荡、横荡或垂荡运动和AUV2的纵荡、横荡运动和垂荡运动。计算方法如图5所示。其中,前景网格的初速度为0 m/s,并以一定的加速度开始运动。
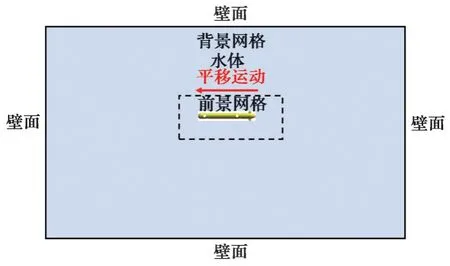
图5 平移运动计算方法Fig. 5 Calculation method for translational motion
纵荡运动的加速度分别被设置为0.2 m/s2、0.4 m/s2、0.6 m/s2、0.8 m/s2及1 m/s2,横荡运动和垂荡运动的加速度被设置为0.1 m/s2、0.2 m/s2、0.3 m/s2、0.4 m/s2及0.5 m/s2。
在不同加速运动的工况下,AUV的受力情况如图6所示。由图可知,加速运动的水动力随加速度增加而增加的基本趋势是相同的,水动力的方向与加速度相反。在纵荡运动工况下,AUV2的水动力值更大一些;而在横荡或垂荡运动工况下,则AUV1 的水动力值更大一些。
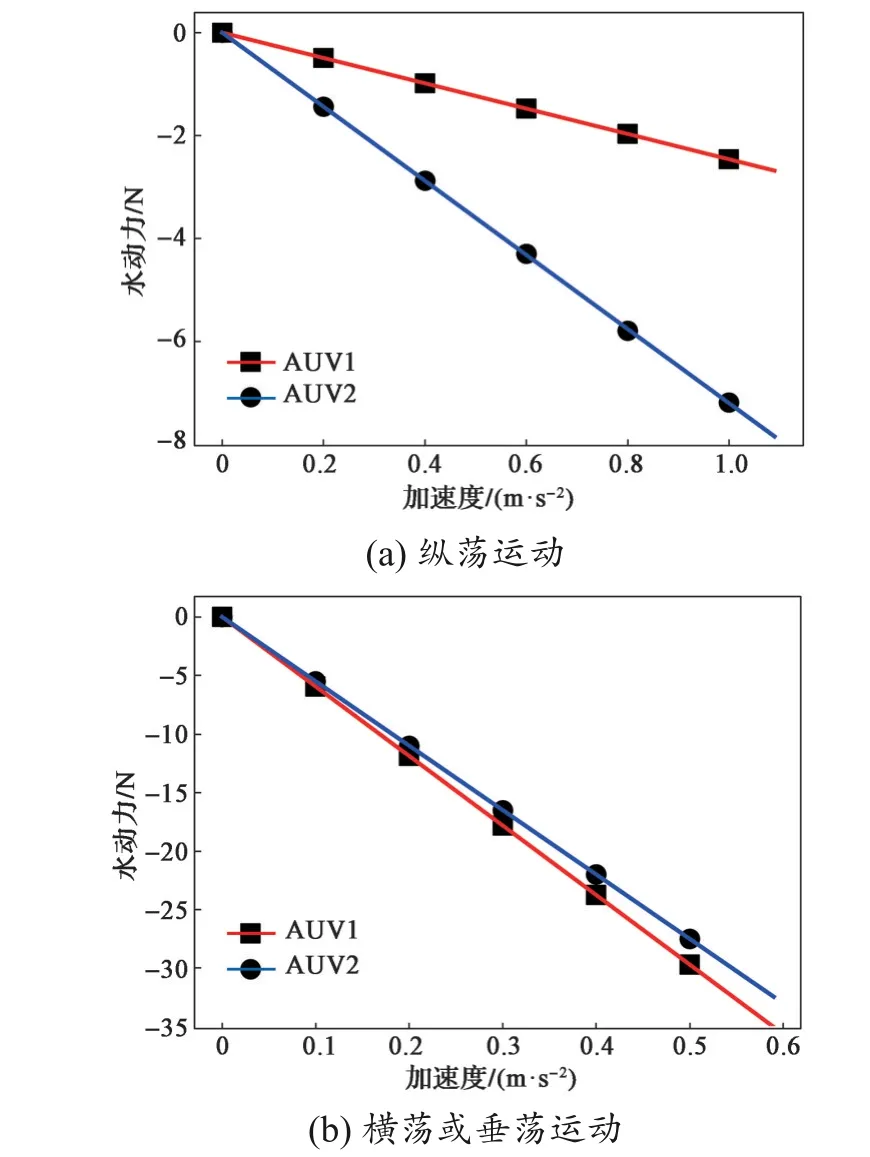
图6 平移运动时AUV 的惯性水动力Fig. 6 Inertial hydrodynamics of AUV during translational motion
通过对图6中的数据进行拟合,得到两个AUV的平移运动惯性类水动力系数,如表2所示。两者的惯性水动力系数相差较大,这主要与两者的结构差异有关。有槽道的AUV2在做纵荡变速运动时,槽道推进器内部的水体动能也显著增加,导致其水动力值高于AUV1的;而在横荡或垂荡运动工况下,由于槽道的存在,AUV2的迎面面积小于AUV1的,做变速运动时,其产生的水动力值也更小一些。

表2 惯性水动力系数计算结果Tab. 2 Calculation results of inertial hydrodynamic coefficient
4.1.2 旋转运动计算
旋转运动工况计算包括纵摇和艏摇两个工况,由于AUV的对称性,这两个自由度运动产生的水动力是相同的,因此本文只进行纵摇运动的计算。计算方法如图7所示,涉及AUV 旋转加速度为0.1 rad/s2、0.2 rad/s2、0.3 rad/s2、0.4 rad/s2及0.5 rad/s2这5 种工况。不同工况对应的水动力数据如图8 所示,产生的水动力与运动方向相反,水动力大小与加速度幅值正相关。通过数据拟合获得惯性水动力系数如表2所示。有槽道的AUV2在进行旋转运动时,其旋转带动的周围水体相较于与无槽道的AUV1 更小一些,因此其惯性水动力系数略低于AUV1的。

图7 旋转运动计算方法Fig. 7 Calculation methods for rotational motion

图8 旋转运动时AUV 的惯性水动力Fig. 8 Inertial hydrodynamics of AUV during rotationalmotion
4.2 黏性水动力系数计算
黏性水动力系数反映了AUV 运动时由于液体黏滞作用产生的水动力情况,通过对AUV匀速平移运动和旋转运动的模拟进而拟合获得黏性水动力系数。
4.2.1 平移运动计算
分别计算AUV的纵荡、横荡和垂荡3种匀速直线运动以求解平移运动黏性水动力系数。纵荡运动计算了运动速度为0.5 m/s、1 m/s、1.5 m/s、2 m/s、2.5 m/s及3 m/s的6 种工况;横荡和垂荡运动分别计算了运动速度为0.1 m/s、0.2 m/s、0.3 m/s、0.4 m/s及0.5 m/s的5种工况。计算方法如图9所示。由于平移运动时AUV的速度较大,如果采用前景网格运动的非定常运动模拟方式,需要较大的背景网格区域,这会大幅增大计算域的网格数量,造成计算量的增加。因此,在计算平移运动的黏性水动力时,本文采用了定常的虚拟水池的方法。
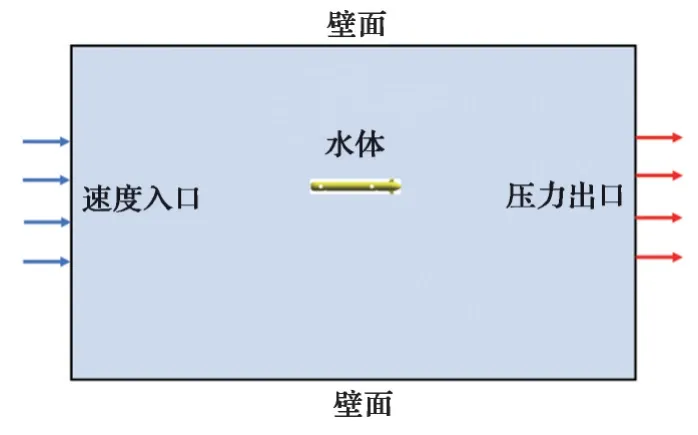
图9 平移运动黏性水动力计算方法Fig. 9 Calculation methods for viscous hydrodynamics during translational motion
AUV1的纵荡、横荡和垂荡3种运动的水动力数值均大于AUV2的。在纵荡运动时,两个模型的迎流面积基本相同,但由于4 个布置在中部的槽道破坏了艇身的流线形,增大了阻力;在横荡和垂荡运动中,虽然AUV2 迎流面积相较AUV1 的更小,但流体流过槽道时产生了摩擦阻力。综合上述两个因素,AUV2的阻力仍大于AUV1的。
同时,由于AUV2 在水平面和垂直面的截面并不完全相同。如图10所示,AUV2在做横荡和垂荡运动时的阻力也不相同。
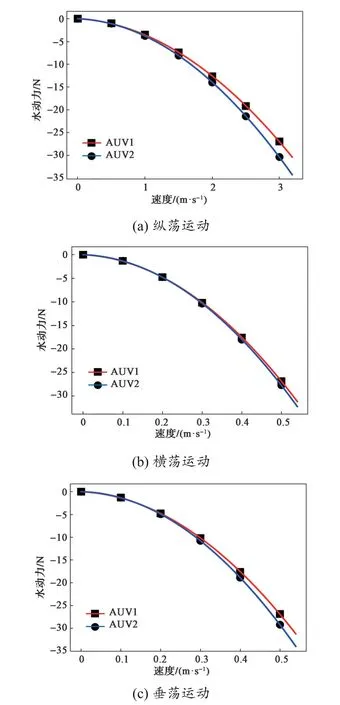
图10 平移运动时的黏性水动力Fig. 10 Viscous hydrodynamics during translational motion
通过对图10 中的速度-水动力的曲线进行拟合,可获得黏性水动力系数,如表3所示。可以看出,AUV2的黏性类非线性水动力系数(Xu|u|,Yv|v|,Zw|w|)明显大于AUV1的,且在高速运动时两种AUV的阻力性能差距更加显著。
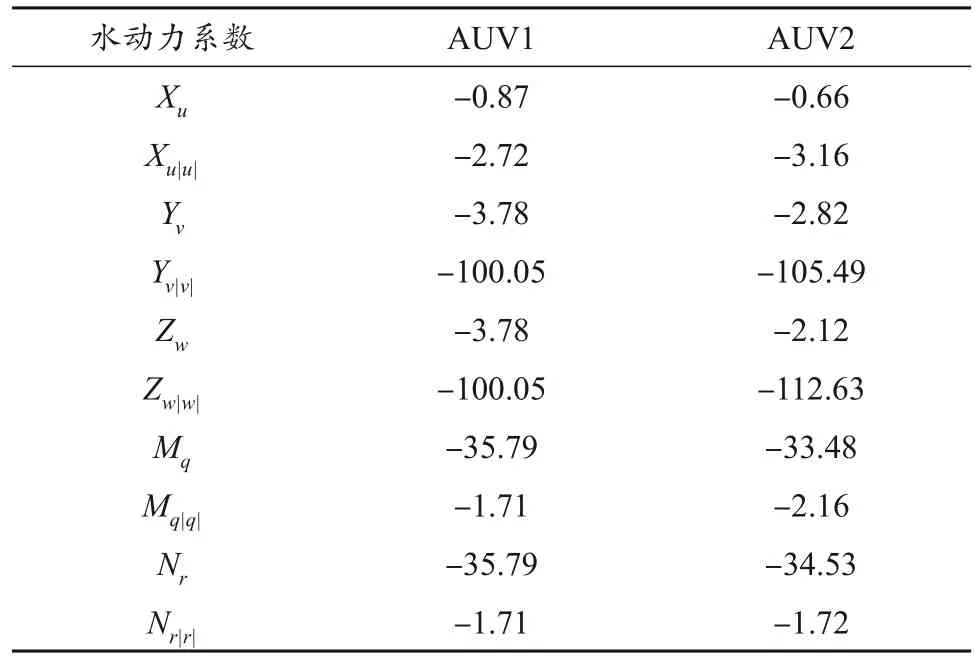
表3 黏性水动力系数计算结果Tab. 3 Calculation results of viscous hydrodynamic coefficients
4.2.2 旋转运动计算
分别计算AUV 的纵摇和艏摇两种运动以求解旋转运动黏性水动力系数。旋转运动速度为0.1 rad/s、0.2 rad/s、0.3 rad/s、0.4 rad/s 及0.5 rad/s 的5 种工况,计算方法如图7所示。这5种工况下计算得到的水动力数据如图11所示。通过系数辨识,获得表3所示的水动力系数。

图11 旋转运动时的黏性水动力Fig. 11 Viscous hydrodynamics during rotational motion
纵摇运动时,有槽道的AUV2 的黏性类非线性水动力系数(Mq|q|,Nr|r|)高于AUV1的;而艏摇运动时,两者相差不大,但槽道在艇上的布置位置对旋转运动时的阻力影响区别较大。
5 结束语
本研究通过对带有和不带槽道推进器的两个AUV 模型进行水动力分析,评估了槽道推进器对AUV 水动力性能的影响。计算结果表明,槽道推进器的存在显著增加了AUV纵荡运动的惯性水动力,而降低了横荡、垂荡、纵摇和艏摇的惯性水动力;此外,槽道推进器的存在还导致了平移运动黏性水动力的增加,而旋转运动的黏性水动力却减小。因此,可以得出结论:槽道推进器对AUV 的水动力具有显著影响,特别是对纵荡运动的惯性水动力性能有较大影响。在实际应用中,工程师和设计师可以考虑槽道推进器对AUV水动力性能的影响,特别是在需要控制AUV 的纵荡运动。
本研究采用的CFD 方法为研究AUV 水动力提供了一种有效的分析工具,可以进一步扩展和改进。未来可以进一步探索不同槽道推进器设计和配置对AUV水动力性能的影响,并结合实验数据验证模拟结果的准确性。
