融合多种技术手段的历史建筑测绘
2024-01-08许新海
许新海
(蚌埠市勘测设计研究院,安徽 蚌埠 233000)
0 引 言
随着城市的建设与发展,诸多历史建筑遭到不同程度破坏,对于历史建筑的保护刻不容缓,历史建筑测绘是历史建筑保护管理工作中的一项重点基础工作。
目前历史建筑的测绘方法主要有全站仪法、摄影测量法、三维激光扫描等方法。历史建筑形式丰富,造型复杂,单一测绘方法,采集效率低,工作难度大,难以适用历史建筑建档全面测绘的要求。
基于无人机倾斜摄影、三维激光点云的历史建筑二维图绘制及三维建模,实现了高精度模型,数据获取速度快、实时性强、精度高及非接触式测量等优点应用于古建筑的精细测绘项目中。文献[3]利用三维激光扫描仪获取历史建筑点云数据,通过相应软件对点云数据处理,在cloudworx中绘制CAD二维图,在Smart 3D中构建的三维模型,均具有较高的精度。文献[6]基于无人机倾斜摄影测量和三维激光扫描技术的历史建筑数字实景模型创建方法,建立了历史建筑的精细化整体模型,解决了存在盲区、纹理细节表达失真的问题,对历史建筑数字化保护、活化利用提供了数据支撑。文献[7]基于倾斜摄影和三维激光点云融合技术应用于历史建筑测绘,进行三维仿真建模。本文通过建筑场景实景三维模型以及室内外的三维激光扫描点云,建立了精细的历史建筑单体化模型,制作了平立面图及大样图,为历史建筑建档提供基础资料,实现了历史建筑的全面、准确测绘。
1 基本原理
1.1 倾斜航空摄影的基本原理
倾斜航空摄影是利用倾斜航空相机获取地物信息的一种新型的航空摄影方式。倾斜航空摄影区别于传统的竖直航空摄影方式,倾斜航空摄影技术可同时获得同一物体多个不同角度的、具有高分辨率的影像,可采集丰富的地物侧面纹理,GNSS配合惯导系统获取高精度的位置和姿态信息,基于专业软件,进行影像预处理,在进行空中三角测量计算、模型重建计算后,批量建立高质量、高精度的测绘产品。
1.2 三维激光扫描的基本原理
三维激光扫描仪的主要构造是由一台高速精确的激光测距仪,配上一组可以引导激光并以均匀角速度扫描的反射棱镜,通过传动装置的扫描运动,根据设定的扫描角度,对物体进行全方位扫描,获得物体的空间信息,三维激光扫描仪的原始测量数据包括测点的三维坐标、RGB信息、反射率等,可快速重建被测目标的三维模型及线、面、体等各类数据。
目前可采用脉冲式测距、激光三角法测距、相位式测距等方式得到坐标原点O到目标点P的距离S、水平角φ、垂直角θ,通过公式计算可得目标点P的空间三维坐标(X,Y,Z),如图1所示。
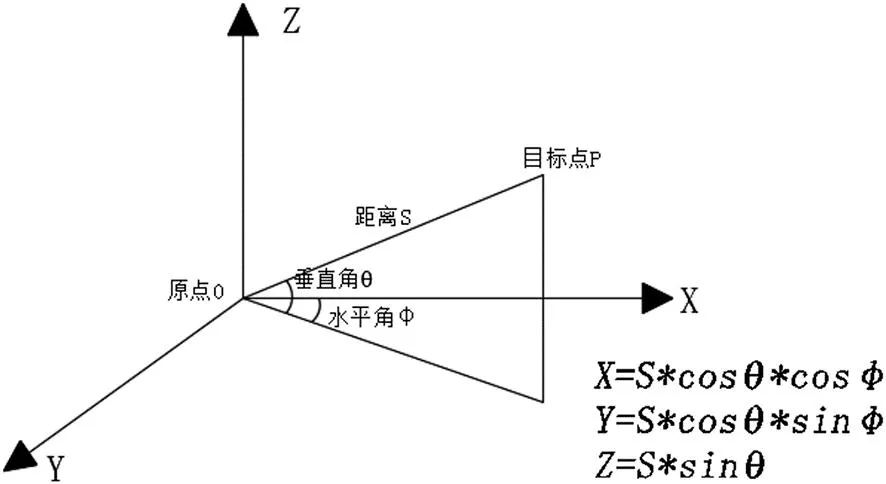
图1 扫描点坐标计算
2 倾斜摄影、三维激光扫描在历史建筑测绘中应用
2.1 项目背景
为加强历史建筑保护工作,根据《安徽省历史文化名城名镇名村保护办法》《历史文化街区划定和历史建筑确定工作方案》等要求,2018年10月,蚌埠市公布了市区第一批历史建筑名录,主要包括宝兴面粉厂等11处建筑,同年12月,公布了市区第二批历史建筑名录,主要包括太平街清真寺等7处历史建筑。
本次历史建筑测绘内容主要包括历史建筑区域实景三维模型以及历史建筑单体三维建模,平、立面图、典型构件大样图等成果,为历史建筑的保护、修缮和管理提供基础资料,为后续保护利用提供数据支撑。
2.2 作业流程
针对上述成果要求,综合无人机倾斜摄影以及三维激光扫描技术,历史建筑测绘作业流程如图2所示:

图2 历史建筑测绘作业流程图
2.3 控制测量
本次测量平面坐标系统采用2000国家大地坐标系(CGCS2000),高程系统采用1985国家高程基准。根据历史建筑的特点,开阔地带采用AHcors进行平面控制测量,建筑密集地区采用导线测量方法布设。高程测量采用四等水准联测。
2.4 倾斜摄影测量
本次测绘对象为历史建筑清真寺,周边为多层住宅小区,根据测区现场实际情况,选用大疆精灵4RTK进行航飞作业,由飞行器、遥控器、云台相机等组成,配合网络RTK服务,可实现厘米级定位,同时记录的原始卫星观测值及曝光事件数据,可用于动态后处理PPK(post-processed kinematic)差分解算等。内业采用武汉天际航有限公司的DP-Smart软件进行空中三角测量及全自动三维建模。
(1)航线布设及数据获取
根据项目分布区域特点确定飞行范围,合理规划飞行航线,确保航向重叠度保持在80%以上,旁向重叠度在75%以上。为了建立历史建筑区域精准的实景模型,选择摄影测量3D(五向飞行)模式,航线由正射航线和倾斜航线组成。平行于测区边界线的首末航线的侧视镜头能够获得测区的有效影像。考虑到倾斜摄影相机拍摄角度,为保证边缘物体立体成像,航线覆盖超出测区边界线至少 200 m。最终布设的航线16条,航向重叠度、旁向重叠度均为80%,飞行高度 80 m,航带间距 19 m。
(2)空三加密全自动建模
飞行完成以后,在DP-Smart中新建工程,添加影像数据以及对于对应的Pos数据,经过提取特征点、相对定向、匹配连接点、区域网平差,生成摄区的空中三角测量成果。根据空三成果,提取特征点,生成密集点云数据以及三角网构建、纹理映射等,最终得到实景三维倾斜模型(图3)。

图3 清真寺实景三维模型
2.5 三维激光扫描
由于清真寺属于民族特色建筑,诸多结构呈不规则形状,造型复杂,采用三维激光扫描清真寺内部庭院及室内外空间,为后续精细单体化建模及图纸制作提供数据支撑。
(1)外业数据采集
①激光点云的定位:根据清真寺的实际情况,定位标记采用专用标靶纸粘贴固定,每站均设置一个,共计设置12点。利用徕卡TZ12全站仪(测角精度±2″,测距精度 1 mm+1.5 ppm),精确测定标靶纸标记点的三维坐标,后期内业坐标转换。
②点云采集及影像获取
采用德国的Z+F IMAGER 5010C扫描仪,每两站之间均设置三个公共标靶球,采用Super High超高分辨率对标靶球进行扫描,采用high分辨率进行建筑本体扫描。其中,对于体现历史风貌和民族特色的栏杆、雕花等部分采用Super High超高分辨率扫描,用于后期大样图制作,单站扫描以及拍照需用时15分30秒。
(2)点云数据处理
Z+F扫描获得的数据导入LaserControl后处理软件进行降噪处理,利用软件三维选择工具对多余点等进行删除,仅保留所需数据以提高后续处理的效率。利用外业拍摄照片进行每站点云数据的着色,得到彩色点云。点云处理后进行点云拼接,利用两个标靶进行拼接,第三个标靶作为多余观测,进行平差计算,提高拼接精度,本次拼接精度报告三个标靶球在X、Y、Z三个方向上偏差以及总偏差:平均偏差:1.3 mm,标准偏差:0.8 mm,最大偏差:4.0 mm,完全满足规范要求。
点云拼接完毕以后,在软件中对标靶纸的标记点进行标记点号,对全站仪采集数据进行编辑导入软件进行匹配,通过标靶纸标记点坐标将点云数据归化到CGCS2000坐标系中,获取绝对坐标清真寺完整点云数据如图4所示。
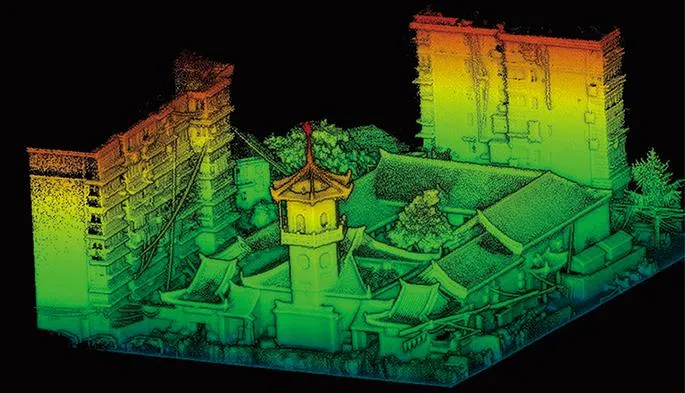
图4 清真寺点云数据
2.6 建筑精细模型制作
根据历史建筑细节精细表达的要求,依据实景三维倾斜模型、三维激光扫描数据以及DP Modeler、3D Max软件进行精细模型制作,利用DP Modeler在实景三维模型中采集粗模,自动纹理映射,部分柱与栏杆、窗户利用三维激光扫描数据在3D MAX中细化结构,对于可能出现的图片效果较差的情况人工进行筛选,重贴纹理,编辑完成单体化模型。对每个建筑模型统一命名编号,命名规则为“市拼音缩写-区县拼音缩写-历史建筑编号-单体建筑编号”。完成的建筑模型(BBS-BSQ-012-001)成果如图5所示。
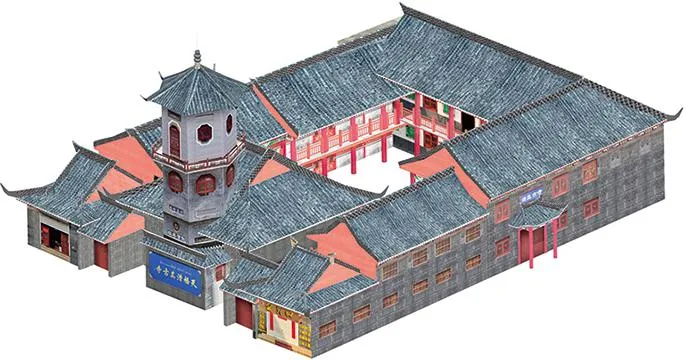
图5 建筑模型成果图
2.7 平、立面图绘制
点云数据处理完成后,通过专业软件进行平、立面图的绘制,要求线条平顺,结构细节表达完整。利用Z+F LaserControl软件导出.las格式点云,利用南方SouthLidar软件进行平面图绘制,根据测图需要固定高度对点云进行水平切片,完整显示房屋墙体,选择直角绘制模式,沿着建筑墙体轮廓采集房屋。使用Autodesk Recap软件将点云数据格式转换为.rcs格式后导入AutoCAD 2019后进行立面图绘制,将点云模型通过相关软件的投影功能进行平面投影处理,从而得到投影后的平面点云数据,然后在平面点云数据上绘制立面图形,并标注尺寸及相关材质,对于部分被遮挡屋面结构及相关信息通过实景三维模型获取。绘制完成的建筑物平、立面图如图6~图8所示。能够体现历史风貌和民族特色的建筑样式,绘制典型大样图。
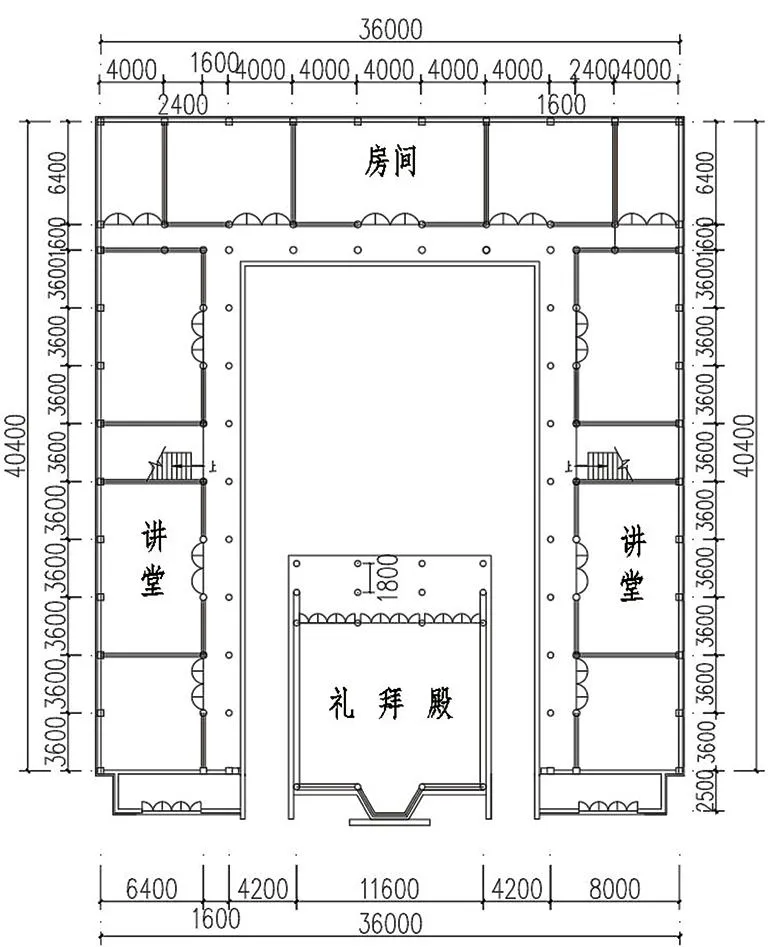
图6 清真寺总平面图

图7 讲堂侧立面图

图8 讲堂南立面图
2.8 精度评定
历史建筑平面图、立面图测绘完成后,安排质检小组随机抽查8个尺寸,采用测距仪测量边长以及全站仪测量高度方法,以检测平面图、立面图测绘成果的精度,检测分析对比表如表1所示:

表1 实测边长与平立面成果对比表(单位/m)
通过表1分析,差值最大为6 cm,最小为 1 cm,检核结果皆满足《地面三维激光扫描作业技术规程》中平面图、立面图、剖面图制作的要求:结构尺寸应实地检核,相对误差应不大于1/200。精度可靠的历史建筑基础数据,可以提供给历史建筑档案制作使用,满足历史建筑保护工程需要。
3 结 论
通过上述工程实践,综合运用倾斜摄影、三维激光扫描等测绘新技术,获取了精确、翔实的历史建筑基础数据,提交的测绘成果能够反映历史建筑历史风貌、构造工艺特征等,内容丰富,表达形式直观、多样,并对后续历史建筑测绘成果的建立、归档进行统一和规范。
项目完成后,建立历史建筑资料数据库,同时将成果导入现有规划管理信息平台,实现了历史建筑规划保护和修复的信息化管理。目前已成功应用于历史建筑常规修缮维护、合理利用等历史建筑保护工程。
