三船体浮托作业水动力响应数值模拟
2024-01-08张文军李宏伟
张文军,李宏伟
应用研究
三船体浮托作业水动力响应数值模拟
张文军1,李宏伟2
(1. 梧州学院管理学院,广西梧州 543003;2.中国石油大学(华东)船舶与海洋工程系,山东青岛 266580)
针对退役的大型海洋平台拆除问题,现提出一种双船起重系统(TML)将平台上部模块整体浮托并驳运到运输船上。为研究该方法的可靠性,对三船系统小间隙并靠时的波浪力和RAO进行了数值模拟,分析了不同的环境情况下三船体耦合作用时的水动力参数变化特性。结果显示三船系统对海况条件的变化比较敏感。波高增加后,船舶之间的相对运动的有义值也显著增加;船舶之间的相对运动在不同浪向角下呈现不同的数值。实际作业中应考虑避开运动响应较大时的波浪频率和环境载荷方向。
多浮体 浮托法 水动力参数 频域分析 数值模拟
0 引言
平台退役与弃置是油田开采整个过程里最终的一环,退役平台的拆除工作会成为新的产业并带来庞大的市场,开发与之配套的技术和设备刻不容缓[1],退役平台的拆除工作和装备将会有非常大的市场发展前景[2-4]。而重型浮吊(HLV)的价格和作业风险日益增高,所以DEVON公司[5]、瑞士船东Allseas、美国Versabar[6]等海工公司研制开发了一些平台拆除的工程船,康菲公司、Murphy/Technip公司[7]则采用了双驳船浮托法来进行整体施工。而这同时也促进了TML的产生和应用。
双船起重法(TML)包括了两艘相同的装有 DP3动力定位系统的起重船和一艘驳船。每艘起重船各装载4门起重器,从两侧靠近导管架平台,并使用起重器合力抬升上部模块,将上部模块由导管架上拆除。TML作为一项主要用于一体化安装、拆除海上导管架平台的技术,具有风险更小、费用更低、效率更高、适用范围更广等优势。
但TML中存在多艘船舶并存的情况,整个三船系统的运动特性在海洋环境下会表现出很复杂的变化[8]。本论文将TML系统一体化拆解平台上部模块时的过驳作业过程中的运动特性作为研究目标,重点探讨三船并靠时耦合作用对系统水动力参数的影响,为退役平台一体化拆解领域提供一种高效安全的方法。
1 方案介绍
平台拆除方案的设计需要对多方面进行充分考虑。包括平台最初设计、建造和安装的情况,使用过程中结构的变化、部分备的添加和减少,以及拆解装备、拆除设计和施工能力的影响[9]。
TML一体化拆除平台上部模块方法包括准备、对接、拆除、进船、过驳、单船运输6个阶段。这个过程中有多个过驳阶段的船体与结构参与(包括两艘起重船、一艘驳船和一个上部模块),考虑外力复杂,判定参数多,三船耦合的水动力相互作用会影响到每艘船在海洋环境中的运动特性[10],同时过驳阶段也是整个方案中最重要的阶段之一。所以,本论文以过驳阶段为例,对TML三船系统对每艘船水动力参数的影响进行分析,并与各船单独计算的结果进行对比。
2 数值计算理论
2.1 坐标系及环境荷载方向定义
为说明船舶与平台上部模块在海浪中的运动响应,建立了3个右手坐标系:(1)大地坐标系:O-xyz,原点O在海平面上,z轴竖直朝上。(2)随船坐标系:O-xyz,O-xyz,O-xyz,原点O在船艏的基线位置,正方向和大地坐标系相同。(3)上部模块坐标系:O-xyz,原点在上部模块第一水平层,正方向和大地坐标系相同。

图1 坐标系及环境方向定义
2.2 频域计算理论
依照势流理论,假定流体是不可压缩、无黏性且无旋转的理想流体,多浮体包含三个无航速的浮体,而这之中一个浮体M的速度势为:

式中:为作用于M上的入射波速度势;φ为因为浮体L存在而对浮体M造成的绕射势,也含浮体M对它本身造成的绕射势;φ为浮体M不动时,因为另外的浮体振荡,作用于浮体M上的辐射势,也含浮体M对它本身造成的辐射势;ζ为浮体自由度的运动响应,=1~6、=7~12和=13~18分别表示第一个、第二个和第三个浮体的纵荡、横荡、垂荡、横摇、纵摇和艏摇六个自由度。
浮体在频域下的运动方程可以写成:

式中:M是第个浮体的质量矩阵;C是第个浮体的静回复力矩阵;F是第个浮体的波浪力;A是附加质量矩阵;B是阻尼矩阵;ζ是每个浮体的六个自由度运动。
3 数值模型
3.1 船型参数及有限元模型
三艘船的主尺度以及吃水数据如表1,组块尺寸及重量数据如表2。

表1 起重船主尺度信息表

表2 组块尺寸信息表
驳船B和起重船A/C之间的距离为19 m,图2为系统的有限元数值模型。
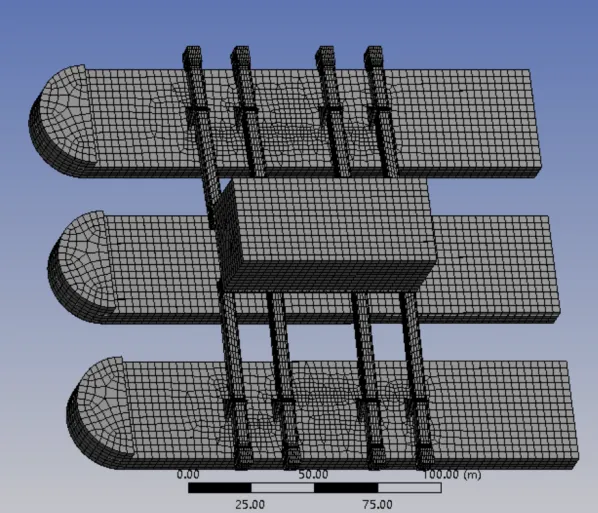
图2 TML系统有限元模型
3.2 环境参数
参考海域常规海洋环境情况,选择表3数据作为频域分析时的输入条件,系统作业水深80 m。
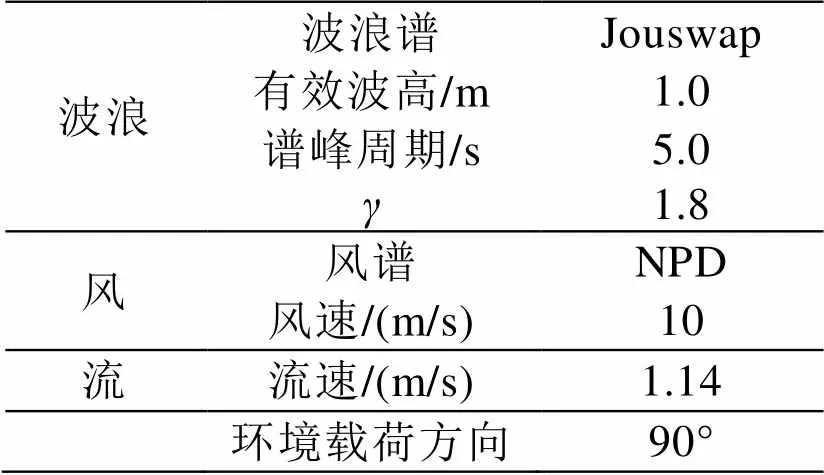
表3 环境条件
4 三船相互作用对水动力参数的影响
由于水动力相互作用对附加质量、辐射阻尼和船舶波浪力的影响重点表现于波浪频率的范围之内,所以船舶的幅值响应RAO也在波浪频率内波动。如图3、图4,船舶单独存在时在艏浪浪向的情况下的横摇响应接近0,但在三船系统之中,因为水动力相互作用,三艘船都表现出显著的横摇运动响应,并且起重船A/C的运动幅值远超驳船B的值;艏浪浪向下起重船A/C处于对称位置,因此起重船A和C横摇运动响应是一致的。
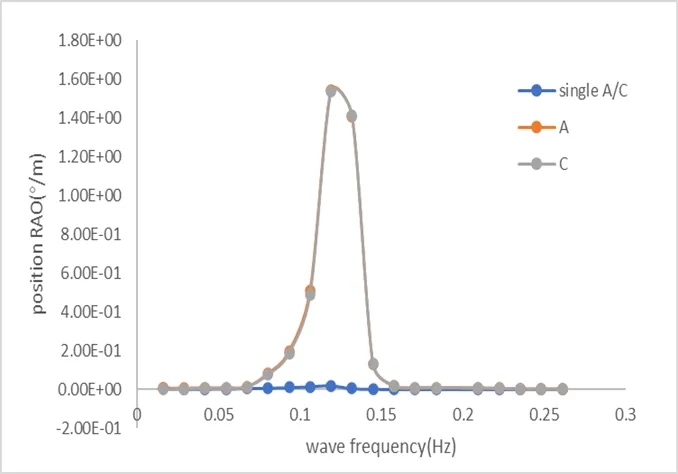
图4 起重船A/C0°横摇RAO
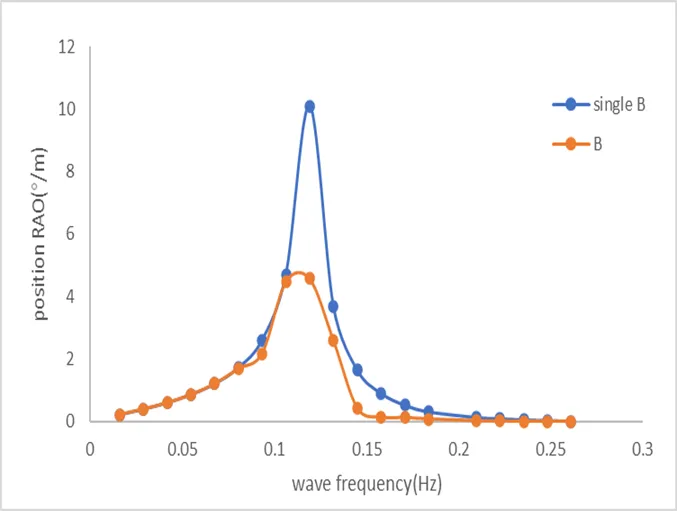
图5 驳船B90°横摇RAO
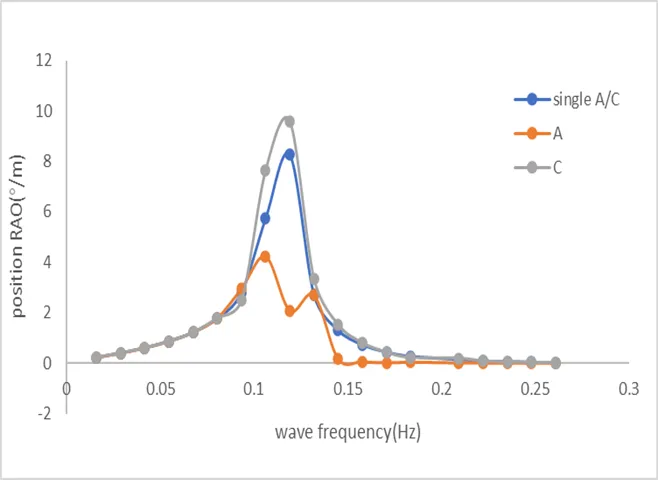
图6 起重船A/C90°横摇RAO
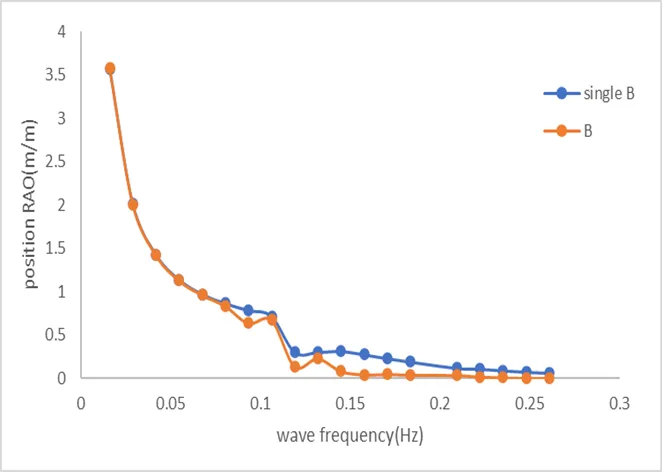
图7 驳船B90°横荡RAO

图8 起重船A/C90°横荡RAO
如图5到图8所示,在90度浪向的情况下,迎浪的起重船C的运动响应幅值比单独存在时有所增加,而因为遮蔽效应的影响,起重船A和驳船B的运动响应幅值则有所减少。
5 水深吃水比对波浪力的影响
分别选择20 m、40 m、80 m和1000 m的水深,即2.11、4.21、8.42与105.26的水深吃水比,对起重船C进行水动力分析,分析过程中考虑三船系统的水动力相互作用。
通过数值模拟分析后表明,当水深吃水比减小时,波浪力在整个波浪频率范围之内,尤其低频率区域是表现出了不断増大的趋势。一阶波浪力的最高值随水深减少逐渐向低频率区域移动,波浪力最高值都随水深减少而呈现显著的增加趋势。
6 给定海况三船系统频域运动分析
6.1 不同波高下对三船系统的影响
由于三船系统的相互作用,组块转移过程中系统在风浪流的作用下会表现出比较复杂的动力特性。本文采用JONSWAP波浪谱用于模拟环境荷载中的波浪条件,将波浪的有效波高作为变量,计算分析改变波高对三船系统运动响应的影响。分别取1.0 m,1.5 m和2.0 m波高作为研究对象。图9列出了三种波高下三船重心位置相对运动有义值比较。
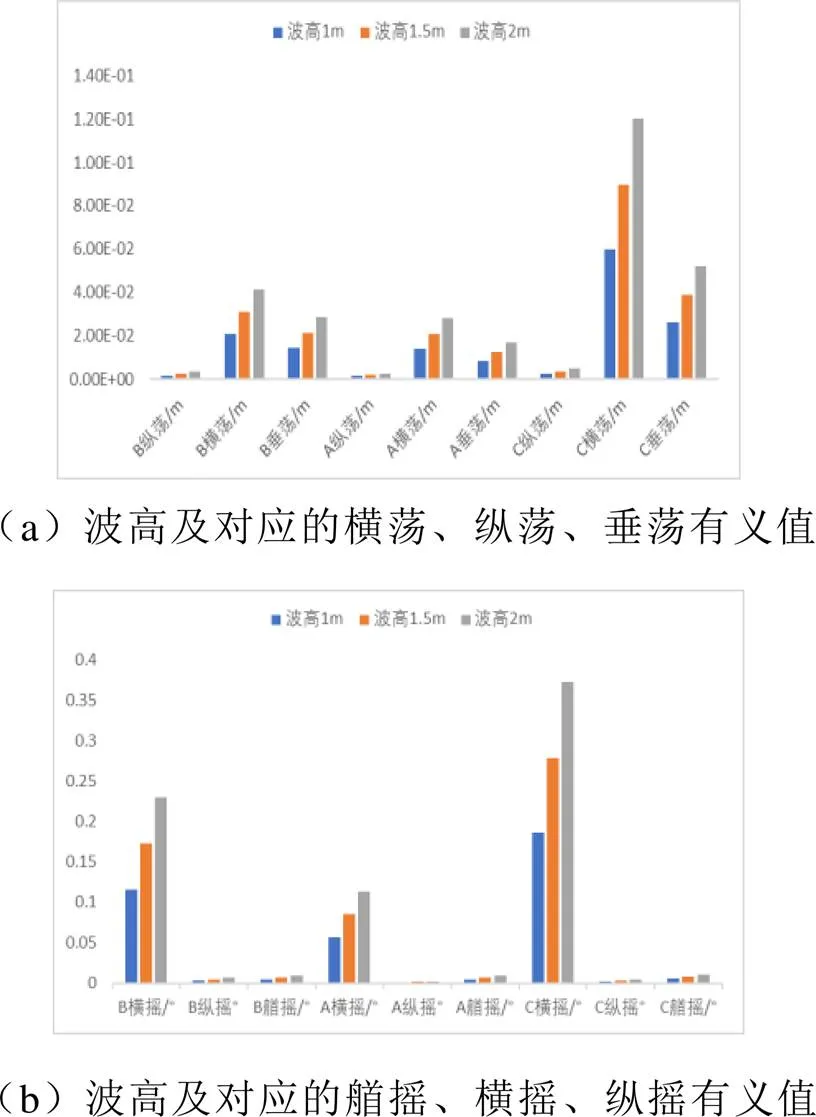
图9 不同波高下的影响
波高增大后,船体之间的相对运动的有义值也有明显增加。对比1.0 m波高和2.0 m波高情况下,增加幅度非常明显,说明系统对坏境条件的改变非常敏感。
6.2 不同浪向下对三船系统的影响
选取0°、45°、90°、135°和180°五个方位,对波浪的入射方位进行分析。通过计算和模拟,得出了不同波高下三船重心位置相对运动有义值比较。结果表明,船体之间的相对运动在不同浪向角下呈现不同的数值。横荡、垂荡和横摇的相对运动值在90°浪向时最大;纵荡的相对运动值在180°浪向时最大;纵摇和艏摇的运动值较小。
7 结论
TML是未来海工拆除作业市场的一种新工艺,填补我国在海洋工程起重拆解领域的一项技术空白。本文描述了TML拆除平台的步骤, 进行了初步计算分析,对所建立的TML组块拆除方案的多浮体模型的水动力性能进行了详细的研究和模拟,得到了船舶在多浮体系统中水动力参数的变化特性。本文结论主要如下:
1)三船系统对水动力参数的相互影响主要在波浪频率范围内。考虑耦合时船舶的附加质量和阻尼会发生变化,而受到的波浪力幅值会减小。
2)0°浪向时,三船仍会有一定的横向运动,且船A和C的运动响应相同,而单独存在时的横向运动几乎为0;90°浪向且三船耦合时,迎浪船运动幅值增大,背浪船减小。
3)随着水深吃水比的减小,波浪力最大值显著增大,同时所对应的波频降低。
4)系统对环境条件的改变很敏感。波高增加后,船舶之间的相对运动的有义值也显著增加;船舶之间的相对运动在不同浪向角下呈现不同的数值。
而该方案仍存在需要解决的问题:类似的拆除案例较少,缺乏可供借鉴的经验;多浮体系统对环境载荷的影响更加敏感,系统抵抗风浪的能力较弱,需尽量减少双船和组块处于耦合状态下的作业时间;只采用了数值模拟方法进行研究分析,方案实施前还需要进行相关的物理模型实验,在以后的研究工作中需要加以考虑。
[1] 刘登辉. 双船浮托法整体拆除岐口18-2平台组块技术研究[J]. 中国修船, 2018, 31(3): 39-41.
[2] 许杰, 霍宏博, 李金蔓等. 渤海隔水导管整体拆除技术[J]. 石油机械, 2018, 46(04): 42-46.
[3] 杨永斌. 海上平台弃置技术及市场前景预测[J]. 中国海洋平台, 2013, 19(1): 4-7.
[4] 孙希兴, 倪丽芬. 海洋工程施工新工艺-双船起重法[J]. 石油工程建设, 2008, 34(5): 20-23.
[5] 田永花, 李敏雪, 廖凌之. 浅谈国外平台拆除新方法[J]. 中国水运, 2016, 16(7): 327-331.
[6] 刘帅, 秦吉诗. 双船组合吊装工艺在海洋平台拆除中的应用[J]. 工艺技术, 2018, 24: 136-137.
[7] 尤学刚等. 海上油田大型平台一体化工程实践与展望. 石油规划设计, 2013, 24(4): 9~12.
[8] 李西亮. 双船浮托安装中多浮体水动力性能及运动响应研究[D]. 青岛: 中国海洋大学, 2013.
[9] 王儒, 孟俊瑜, 王常文, 等. 浅谈国外海洋石油平台拆除技术[J]. 中国水运, 2015, 15(5): 279-281.
[10] 阮志豪, 张万里, 李怀亮. 双船浮托法数值模拟[J]. 中国海洋平台, 2018, 33(1): 40-50.
Numerical Simulation of Hydrodynamic Response for Three Hulls Floatover
Zhang Wenjun1,Li Hongwei2
(1. School of Management, Wuzhou University, Wuzhou 543003, Guangxi, China; 2. Department of Ship and Ocean Engineering, China University of Petroleum, Qingdao 266580, Shandong,China)
U661.3
A
1003-4862(2023)12-0077-04
2023-06-08
张文军(1971-),男,高级工程师。主要从事交通港航自动化和智能运维的研究。E-mail:re2000@sina.com
