军港码头智能监控系统总体设计
2024-01-08吴昊,高嵬
吴 昊, 高 嵬
应用研究
军港码头智能监控系统总体设计
吴 昊1, 高 嵬2
(1. 中国海警局,北京 100089;2. 海军工程大学,武汉 430033)
本文研究基于物联网技术和智能决策支持技术构建一种智能化的港口管理系统,旨在提升军港运营能力和管理水平。在构建港湾礁石等静态目标的港口态势图的基础上,利用RFID技术管理港口内货物的物流信息,结合GPRS技术和舰艇位姿、港口环境监测等传感器,在态势图中对港口近海域内舰艇的姿态方位、运行轨迹等进行标识,实现对港口环境的监测和目标监控功能。进一步利用智能决策支持系统技术实现对港口近海海域舰船的智能调度,不仅可以显著提高军港的运营效率,也有利于提升反侦察能力和舰船的安全、高效快速机动。
港口 智能监控 物联网技术 智能决策
0 引言
随着国际贸易不断发展、远航互访日趋频繁,大量军用舰船下海服役、民用船舶投入使用[1-2],港口资源的需求日益增大。近年来,我国不断加快选址新建港口码头、扩大现有港口容量的步伐,但依然难以跟上使用需求的增速。因此,有限港口资源的高效管理显得越来越重要。
适宜建港的海岸线,或已建有港口,或已纳入规划,随着大量民用港口的改扩建,致使军港与民用港口间的距离越来越近,港口附近海域经常出现航道共用、交叉等情况,在此环境下,军港的反侦察问题变得日趋复杂,舰艇的快速机动也难以得到有效保证[3]。
智能化管理技术是一种以计算机技术、云计算技术为核心的信息化管理技术[4],将其应用于军港码头管理,可通过视频及雷达监测系统、卫星定位系统、智能路径规划系统等,实现现代化船舶调度,利于舰船的安全、高效快速机动,也利于军港的整体反侦察能力提升。
我国已是海运大国,必将成为海洋强国,利用现代化技术引导规范海上交通、优化配置有限资源是管理技术应用的必然趋势。军港的智能化、信息化建设还处于起步摸索阶段,本文主要是研究设计军港智能监控系统,同样适用于民用港口码头管理。
1 系统功能设计
军港码头智能监控系统是一个大型信息化集成系统,采用无线物联网芯片、舰艇位姿速度传感器、大数据、智能轨迹规划、智能决策支持系统等先进技术,实现对港口近海海域、航道、港湾礁石和舰船的实时监控,并向港口管理人员呈现舰船航行综合态势[5],提供指挥调度接口。港口监控系统综合态势示意图如图1所示。系统总体功能主要分为三个方面,分别为港口环境监测、目标监控和智能调度。
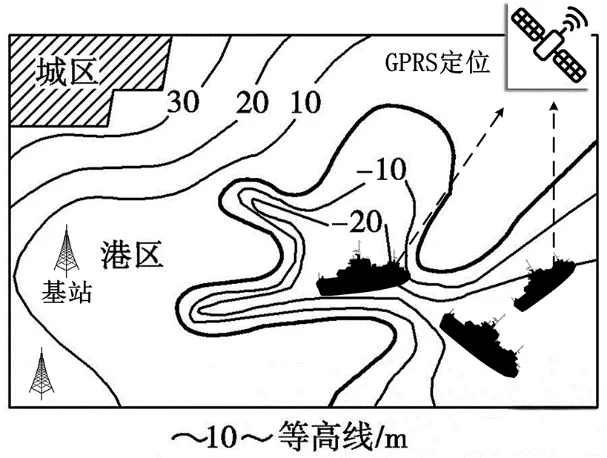
图1 港口监控系统综合态势示意图
1)港口环境监测
港口区域的海流及气象信息对舰船航行指挥至关重要,因而,系统需要设计接收来自气象部门发布的信息接口。同时,需对本地水域信息进行实时采集,包括使用水文传感器采集海水温度、盐度,使用气象传感器采集气温、气压、风向、风速、温度、湿度及能见度等。而后,系统对采集到的信息进行智能分析,最终向指挥员预报天气和海流情况,辅助形成决策指挥调度方案。
2)水域内各目标的监控
一方面,系统需要设计可以接收海上交通管理中心发布的信息接口,港口外部事件对指挥调度存在显著影响,是必须考虑的重要事项,有必要提前知晓此类事件并做出相关决策。另一方面,系统通过雷达、摄像和无线物联网等技术对港口区域内的目标信息进行采集,使系统实时、全面感知港口内的舰船。
3)智能决策
军港近海航道管理的智能决策是指以提供信息辅助决策方式或全自动方式指挥军港近海舰船的有序航行,其主要内容包括两个方面:一是在详细感知航行环境的前提下,利用智能决策系统做出路径规划,驱使舰船前往目的地的自动导航及驾驶技术;二是对比知识库自动识别军港内舰船的航行是否符合规定,对于违规航行及偶然事故,产生警报并及时向指挥调度人员呈现,对于疑似侦查行为,允许操作人员或智能系统与可疑船舶进行紧急通信,或控制无人机、无人艇进行抵近侦察、喊话驱离。
2 主要技术组成
军港码头智能监控系统涉及的主要技术包括三个方面,分别是基于RFID的智能物流技术、GPRS物联网技术和智能化管理技术。
1)智能物流技术
研究利用智能物流技术对港口物流交通进行统一高效管理,既能大幅度减少管理人员数量,降低运营成本,也能促使各作业流程的密切协同,以及各类数据的整合共享,实现物流链的优化配置,提升辅助决策的精准性。
智能物流技术是指通过无线射频识别(RFID)技术,将目标信息接入互联网,从而实现智能化的识别、定位、和管理[6-7],适用于港口内目标的管理。通过在目标上标识RFID电子标签,重要目标应当对电子标签进行加密。目标的物联网过程需配合港口的实际业务流程进行处理,以确定电子标签及其识别器的安装位置。
智能物流系统平台架构通过网络服务器(Web Service, WS)技术集成,有效实现终端与WS之间的通信,实时地感知和采集港口作业数据,并发送至岸基管理系统。
2)GPRS物联网技术
利用RFID技术虽然可以实现对目标进行简单定位,但无法在线实时监控,尤其是对于舰船此类动态目标,因此,舰船需采用更为先进的物联网技术进行管理,即GPRS技术。舰船的实时位置是重要的国防信息,随着国产化卫星导航系统(北斗导航系统及其制导芯片的广泛应用)的大规模使用,利用GPRS实现大范围内众多目标的物联网已成为可能[8]。通过在所有舰艇上安装GPRS定位芯片,并将各舰艇按照实际尺寸进行建模,在港口详细地理信息的基础上,再结合RFID和GPRS技术,即可形成港区整体态势的电子监控图,进一步利用视频和雷达系统进行校正,确保向指挥调度人员显示准确实时结果。
GPRS物联网信号覆盖主要是为了实现港口资源的实时监控与集中管理。首先,各港口资源应处于被监控状态,通过无线物联网技术对各目标进行标识和覆盖,包括类型、体积等关键信息,例如:对所有舰艇长度吃水、姿态方位、运行轨迹等进行标识,并在港口视频管理窗口中进行集中展示。其次,指挥调度命令应确保稳定传输,智能化监控过程中将产生庞大的数据流,而港口基站建设环境比陆地更为复杂[9-10],为了确保语音、视频等数据的高效稳定传输,应推进5G基站的无死角覆盖,为智能化监控提供稳定、快速的网络支持。
为了确保目标的稳定、准确监控,在无线物联网技术的基础上,增设海域视频自动校准模型,两套系统协同配合,对港口内目标进行监视,可以实现系统自检。
3)智能化管理技术
智能化管理技术是智能监控系统的重要组成部分,也是最为关键的技术,其核心内容包括舰艇的自动驾驶决策支持系统和自动疏导航道支持决策系统的研制。
3 关键技术的研究与实现
1)决策支持系统的网络组成
两种智能决策支持系统(Decision Support System, DSS)在网络层面上可划分为3个层次:1)直接面向使用者的应用层,DSS进行系统推理运算,将可执行方案及预期结果呈现给用户,用户可通过人机接口进行系统对话,输入指挥调度信息;2)由系统中各控制协调模块组成的控制协调层,通过标准接口建立联系;3)面向程序设计人员的基本架构层,通过该层对各子模块进行具体的定义,包括轨迹算法设定、模块间通信方式、触发函数等[11]。由客户端、服务器、数据库、模型库和知识库组成,具体如图2所示。

图2 智能决策系统的组成
其中客户端是DSS的指挥调度人员与系统进行信息交流的人机交互接口,通过客户端,用户可以实时干涉轨迹规划问题的求解。服务器是DSS分析问题并向用户提供求解决策结果的部件,首先需要对用户提出的问题进行识别和分析,进而构造解决问题的方法模型,并提取所需的算法和数据,最后对问题进行推算,在推算完成后制定决策方案并通过客户端呈现给用户。数据库是用于存放系统数据。模型库用于存放各种模型。知识库主要是管理有关决策问题领域的知识。
2)决策支持系统的状态机模型
有限状态机模型因为简单、执行效率高,是无人驾驶领域目前最广泛的行为决策模型[12-13]。因此,本研究中港口舰艇自动驾驶决策支持系统和自动疏导航道决策支持系统的研制均基于有限状态机模型架构,利用MATLAB/Simulink软件的状态机(Finite State Automata, FSA)编程语言构建,使用有限的有向连通图来描述不同的驾驶状态以及状态之间的转移关系,从而根据状态的迁移反应式地生成执行方案。
无人艇自动驾驶决策系统的状态机流程如图3所示,自动疏导航道系统的状态机流程如图4所示。在有限状态机模型中,无人艇根据当前环境选择停泊、换道、巡航等合适的驾驶行为。

图3 无人艇自动驾驶决策系统的状态机流程
决策支持系统状态机模型的软件构架可分为全局路径规划层(Route Planning, RP)、行为决策层(Behavioral Layer, BL)和运动规划层(Motion Planning, MP)三个层次。其中,RP层是指在接收到设定目的地后,结合态势图信息,生成一条全局路径,作为后续具体路径规划的参考;BL层是指执行主体在接收到全局路径后,结合环境感知信息做出行为决策(例如无人艇执行切换航道或巡航命令);最后,MP层根据具体的行为决策,规划生成一条满足特定约束条件的轨迹,并作为控制模块的输入决定最终执行方案。

图4 自动疏导航道系统的状态机流程
4 结语
充分利用有限的港口资源,是新时代港口管理的必然发展趋势。利用物联网技术、智能决策技术等现代化手段建立智能化港口管理系统,不仅可以显著提高军港的运营效率,也有利于提升反侦察能力和舰船的安全、高效快速机动。本文提出了一种智能监控系统总体设计方案,重点说明了主要技术组成和关键技术的实现方法,包括智能物流技术、GPRS物联网技术和智能化管理技术。
[1] 钱平. 国外航母发展动向[J]. 国防科技工业, 2022(07): 14-17.
[2] 童康明, 陈鹏宇. 货油舱梯架紧固方案优化[J]. 广船科技, 2021, 41(04): 20-21.
[3] 常书平, 邵立福, 周自文, 等.无人艇在边海防作战保障中的应用研究[J]. 船舶工程, 2020, 42(S1): 10-13+500.
[4] 张道斌. 港口码头系统智能化应用的现状与发展分析[J]. 长江信息通信, 2022, 35(12): 4-5.
[5] 徐婷婷. VTS系统船舶跟踪和预测的新技术研究[D]. 大连海事大学, 2012: 52-57.
[6] 张荣. 物联网在交通运输中的推广应用研究[J]. 中国储运, 2023(02): 188-189.
[7] 姜俊颖. 基于物联网技术的船舶危险货物监测系统[J]. 舰船科学技术, 2023, 45(02): 171-174.
[8] 庄伟豪. 卫星定位信息管理系统的实现[D]. 山东大学, 2020: 48-59.
[9] 李辉. 交通强国建设目标下的江苏省港口发展路径[J]. 水运管理, 2020, 42(05): 18-20+24.
[10] 李辉. 交通强国要求下江苏港口发展路径[J].中国港口, 2020(04): 18-21.
[11] 孙宇翔, 邢建春. 军港勤务保障智能决策支持系统[J]. 四川兵工学报, 2010, 31(08): 85-87+112.
[12] 张英俊, 翟鹏宇. 海运船舶自主避碰技术研究进展与趋势[J]. 大连海事大学学报, 2022, 48(03): 1-11.
[13] Montemerlo M, Becker J, Bhat S, et al. Junior: The Stanford entry in the Urban Challenge[J]. Journal of Field Robotics, 2008, 25(9): 569-597.
Overall design of intelligent monitoring system for military port and wharf
Wu Hao1, Gao Wei2
(1. China Coast Guard, Beijing 100089, China; 2. Naval University of Engineering, Wuhan 430033, China)
TP277
A
1003-4862(2023)12-0020-04
2023-05-18
国家自然科学基金项目(51807197)
吴昊(1989-),男,工程师。研究方向:港口航道与近岸工程管理。E-mail:depin@163.com
