改进人工蜂群优化Ostu电力设备红外图像分割算法
2024-01-08冯新宇付志伟柴侨峥李亚妮刘晓磊
冯新宇, 付志伟, 柴侨峥, 李亚妮, 刘晓磊
(1.黑龙江科技大学 电气与控制工程学院, 哈尔滨 150022; 2.国网黑龙江省电力有限公司 大兴安岭供电公司, 黑龙江 大兴安岭 165000)
0 引 言
随着电力系统智能化的发展,红外热成像检测技术被广泛应用于电力设备故障检测,成为一种高效的检测方法[1]。然而,由于多种电力设备相互关联,导致所拍摄的红外图像背景复杂,故障区域难以提取,这对故障的诊断造成很大影响。因此,电力设备红外图像故障区域的分割至关重要。目前常用的红外图像分割算法包括区域生长法[2]、形态学法[3]、聚类法、阈值法[4]和边缘分割法[5]等。这些算法对简单的红外图像分割有很好的效果,具有收敛速度快、算法简单、实用性强等优点[6]。但对于背景复杂的电力设备红外图像,这些算法存在过分割、欠分割、速度慢等问题。为增强红外图像的分割效果,一些学者采用元启发优化算法、人工免疫算法等对经典的红外分割算法进行改进。
Wang等[7]引入改进粒子群(PSO)算法优化Otsu 算法,利用小波变异性防止粒子陷入局部最优,但收敛速度较慢。Qin等[8]引入改进蚁群算法优化Otsu多阈值分割,运用Lévy飞行改进其蚁群搜索过程,有效地提高了算法速度,但在算法迭代过程中容易陷入局部最优。Li等[9]引入遗传算法对K均值分割算法进行优化,使实际应用中的彩色多像具有很好的分割效果,但对红外图像分割时,有时会发生过分割现象。Hang等[10]引入果蝇算法优化Otsu 算法,通过模拟果蝇觅食和繁殖过程对Otsu 算法进行优化,能够有效分割高维图像,但有时容易产生错误阈值。李鹏等[11]结合改进麻雀算法对二维Otsu 算法进行优化,通过Singer混沌映射和随机游走增强种群多样性提高全局和局部搜索能力,具有较强的分割性能,但后期收敛精度不足。王坤等[12]通过改进易经占卜进化算法对Otsu 算法进行优化,在易经算子过程中采用轮盘赌的方式选取适应度大的个体作为新种群,该算法普适性较差,只适用于飞机蒙皮的红外图像。赵凤等[13]采用粒子群和人工蜂群混合优化Otsu 算法,将粒子群的最优解作为人工蜂群算法的蜜源进行迭代,对背景简单图像分割效果好,但对于复杂图像时,实时性差。
针对以上问题,笔者对人工蜂群算法(Artificial bee colony algorithm,ABC)进行改进,提出一种改进ABC优化的Ostu电力设备红外图像分割算法。首先,引入Lévy飞行对种群初始化过程进行改进,增强蜂群的空间搜索能力和种群多样性,从而提高算法寻优的过程,然后利用天牛须搜索法(Beetle antennae search algorithm,BAS),对蜂群的搜索方程进行改进,提高蜂群的全局搜索能力,避免陷入局部最优的问题。
1 人工蜂群算法
Karabage等[14]提出了人工蜂群算法,该算法模拟了自然界中蜜蜂寻找食物的行为,用于解决优化代数问题。ABC算法具有鲁棒性、控制参数少、原理简单等优点,在图像处理、图像识别、路径规划、通信技术等领域有着广泛应用。该算法将优化问题的解视为是蜜源,寻找最优解的过程就是蜂群寻找蜜源的过程。蜜源的采集难度、信息量以及与蜂巢的距离决定其是否为最优解。蜂群被分为雇佣蜂(引领蜂)、跟随蜂和侦察蜂。引领蜂负责寻找蜜源的信息,并通过概率与蜂巢内的跟随蜂进行信息传递。引领蜂的数量与蜜源的数量相同,与蜜源位置一一对应。跟随蜂根据引领蜂传递的信息,在蜜源区域进行搜索,依据贪婪准则选取适应度较优的蜜源,当蜜源搜索完成后,引领蜂会变为侦察蜂,继续寻找新的蜜源。ABC算法的实现分为以下四个执行步骤:
(1)初始化阶段
人工蜂群算法采用随机初始化法,根据式(1)随机产生N个蜜源和蜜源的向量维数为D。
xi,j=xi,jmin+rand(0,1)[(xi,jmax-xi,jmin)] ,
(1)
式中:xi,j——新产生的蜜源;
i——{1,2,…,N}内的整数;
j——{1,2,…,D}内的整数;
xi,jmin、xi,jmax——第i个蜜源Xi=(xi,1,xi,2,…,xi,D)第j维参数的下限和上限。
蜜源的适应度通过轮盘赌公式来判断,由式(2)可知,当目标函数大于0时,目标函数越大,适应度越小。
(2)
式中:f(Xi)——第i个蜜源Xi的目标函数;
fitn(Xi)——第i个蜜源的适应度。
(2)引领蜂阶段
引领蜂探索蜜源的信息,并更新蜜源的信息,搜索公式为
vi,j=xi,j+rand(-1,1)[(xi,j-xk,j)] ,
(3)
式中:vi,j——引领蜂搜索到的新蜜源;
xi,j——原始蜜源;
k——{1,2,…,N}内的整数,且k≠j。
引领蜂依据贪婪准则,对新旧蜜源进行比较,适应度高的蜜源被采用。
(3)跟随蜂阶段
引领蜂完成探索后,返回蜂巢给跟随蜂传递信息,跟随蜂接收引领蜂传递的信息,并依据轮盘赌公式决定是否跟随引领蜂进行采蜜。
轮盘赌公式为
(4)
式中,pi——跟随蜂是否跟随的概率。
(4)侦察蜂阶段
跟随蜂对蜜源搜索完成后,有些蜜源的适应度多次迭代未发生变化,证明该蜜源探索完成,放弃该蜜源,这时引领蜂变为侦察蜂,按式(1)随机产生一个新的蜜源。
2 改进人工蜂群优化算法
针对人工蜂群算法容易陷入局部最优、全局和空间搜索能力差等问题。文中采用Lévy飞行对其种群初始化阶段进行改进,增强蜂群的种群多样性和空间搜索能力,能够有效地提高收敛速度。之后,通过BAS算法改进引领蜂阶段,提高其全局搜索的能力,避免出现陷入局部最优解的问题。
2.1 Lévy飞行
Lévy飞行是随机步长服从Lévy分布的随机行走,Lévy飞行的方差与时间呈指数关系式[15]。Lévy分布为
Lévy(β)~u=t-β, (1<β<3) 。
(5)
计算Lévy飞行步长为
(6)
式中:Lévy(β)——一个带有重尾的概率分布;
β——幂次数;
φ——正态分布的方差;
u、n——服从标准正态分布;
Γ——一个标准的伽马函数。
当β=1.5时,φ为
(7)
文中在智能算法的高维空间中引入Lévy飞行,增强蜂群在空间中的搜索能力,并且Lévy飞行也能够增强引领蜂和蜜源的多样性,使更多的适应函数的最优解参与到寻优的过程中。通过Lévy飞行对种群初始化阶段的改进公式为

(8)
2.2 天牛须搜索法
BAS算法是一种仿生算法,其模拟天牛觅食时使用两个触须感应气味来判断食物位置。当天牛感知到某一侧气味较强时,它会向该侧移动一定距离,并再次感知环境中的气味。如此循环往复,直至找到气味最浓的食物,即为最优解。天牛须算法的数学模型如下。
(1)假设对目标函数f进行n维优化,设天牛位置为S,右触须Sr,左触须Sl,左右触须的间隔为d,步长为
s=cd。
天牛的左右触须表达式为
dir=rand(n,1)。
(2)此时得到两根触须的位置为
Sl=S+ddir/(2‖dir‖),
Sr=S-ddir/(2‖dir‖)。
(9)
求出左触须的适应度fl和右触须的适应度fr,对两者进行比较,天牛向适应度大的方向移动,移动后的位置为
S=S+s‖Sl-Sr‖,fl
(10)
(3)求出天牛新位置的适应度fs,更新步长和左右触须的距离为
s=etas,d=etad。
式中,eta——步长与距离的衰减系数,一般设为0.95。
(4)循环进行(2)(3)直至找到最优解。
文中采用BAS算法对引领蜂阶段的搜索公式进行改进,提高其全局搜索的能力,避免ABC算法在寻优的过程中陷入局部最优的问题。改进过程为

(11)

2.3 基准函数测试
为了验证IABC算法的寻优能力和搜索能力,采用单峰函数(Beale、Matyas、Schaffer、Cross-in-Tray)和多峰函数(Tripod、Rosenbrock、Easom、Schwefel)对其测试[17]。测试函数公式如下:
Beale函数为
f(x,y)=(1.5-x+xy)2+(2.25-x+xy2)2+
(2.625-x+xy3)2,
其搜索范围为[-4.5,4.5], 维度为2。
Matyas函数为
f(x,y)=0.26(x2+y2)-0.48xy,
其搜索范围为[-10,10],维度为2。
Schaffer函数为
f(x,y)=0.5+(sin(x2-y2)2-0.5)/
(1+0.001(x2+y2))2,
其搜索范围为[-100,100],维度为2。
Cross-in-Tray函数为
f(x,y)=-0.000 1×(abs(sinx×sin(y)×
exp(abs(100-sqrt(x2+y2)/π)))+1)0.1,
其搜索范围为[-10,10],维度为2。
Tripod函数为
f(x,y)=max(abs(x),abs(y)),
其搜索范围为[-100,100],维度为2。
Rosenbrock函数为
其搜索范围为[-5,10],维度为20。
Easom函数为
f(x,y)=-cosxcosyexp(-((x-π)2-
(y-π)2)),
其搜索范围为[-100,100],维度为20。
Schwefel函数为
f(x1,x2,…,xn)=-sum(xisin(sqrt(abs(xi)))),
其搜索范围为[-1000,1000],维度为n。
Beale、Matyas、Schaffer、Cross-in-Tray为单峰测试函数,用来测试优化算法的搜索能力,Tripod、Rosenbrock、Easom、Schwefel为多峰测试函数,用来测试优化算法的全局寻优的能力和开发能力。文中将IABC算法与PSO和ABC算法进行测试结果对比。三种算法测试函数的收敛曲线如图1和2所示。
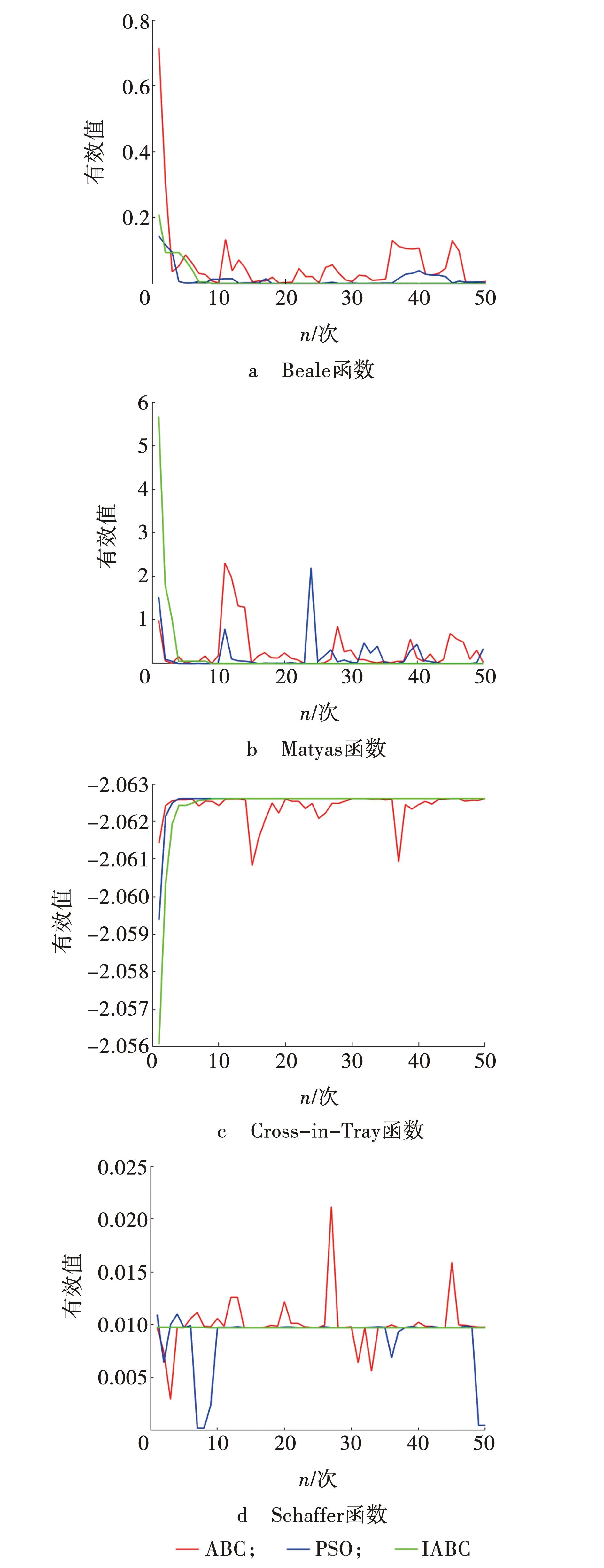
图1 三种算法测试函数的收敛曲线
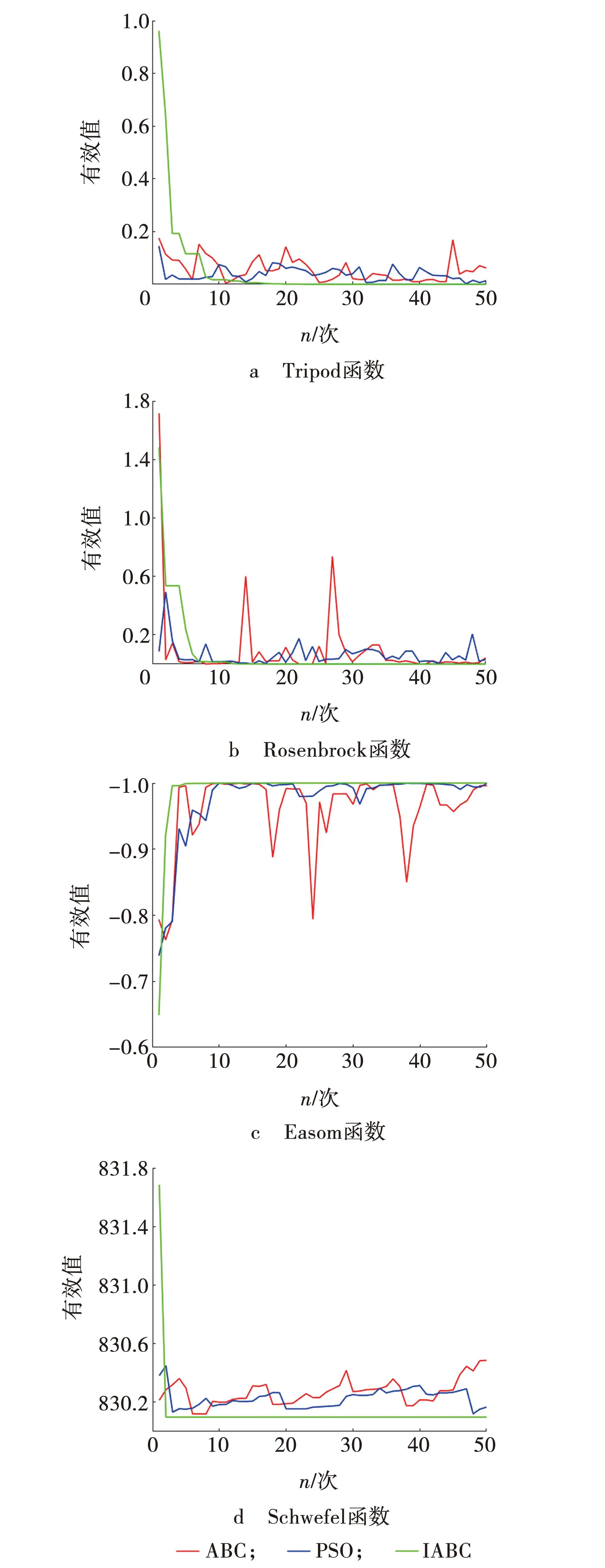
图2 三种算法测试函数的收敛曲线
由图1和2可以看出,IABC算法的迭代速度明显快于其他两种算法,仅需短时间即可迭代到最优解。此外,无论是对于单峰函数还是多峰函数,IABC算法收敛精度明显优于PSO和ABC算法。
为了更好地验证文中算法的搜索和寻优能力,对其运行30次,种群数量设为50,最大迭代速度设为50。计算出算法运行结果的最大值、最小值、平均值和标准差,其中,标准差反映了算法的稳定性,而最大值、最小值和平均值则反映了算法的求解精度和寻优能力,测得数据如表1所示。
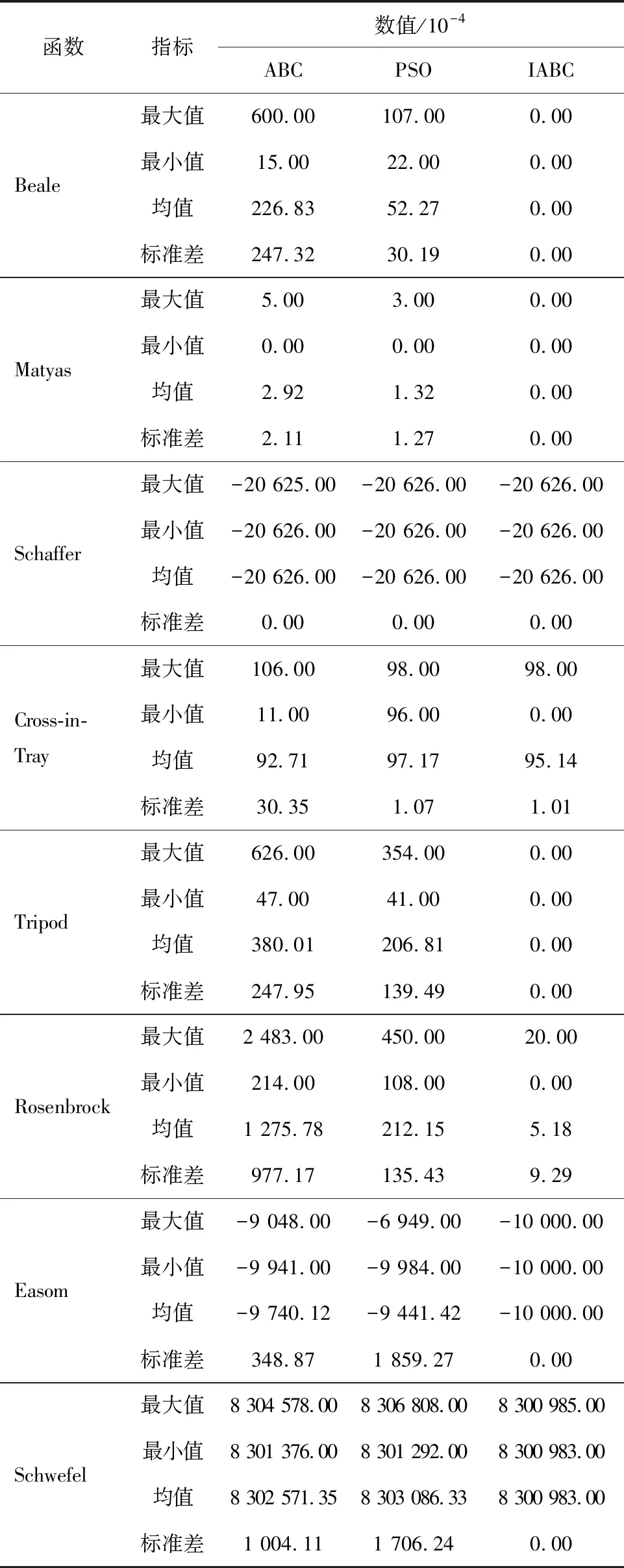
表1 3种算法对测试函数的优化结果
针对单峰函数Beale、Matyas和Schaffer,IABC算法能够直接搜索到最优值,并且其寻优精度和能力均达到了100%。对于单峰函数Cross-in-Tray,IABC算法的标准差与PSO算法相当,但其最小值和平均值更小,这表明IABC算法的寻优能力强于PSO算法。在处理多峰函数时,IABC算法的标准差均优于其他两种算法,表明其稳定性更好。此外,IABC算法的最大值、最小值和平均值也均明显优于其他两种算法。综上所述,IABC算法不仅具备更好的稳定性,而且其寻优精度也得到了改善,因此IABC算法的寻优能力更强。
3 改进人工蜂群优化的Ostu算法
3.1 Ostu算法
Ostu算法是一种自适应阈值分割算法。该算法以目标图像和背景图像之间的最大类间方差作为阈值对图像进行分解[18]。
假设图像的灰度级L=256,像素总数为N,灰度级为i(i=0,1,…,L-1)的像素个数为xi个,则
灰度级为i的像素出现的概率为
图像的总灰度均值μ为
以灰度值h为阈值,将红外图像分为D0和D1,D0为需要分割得到的目标区域,像素的灰度级为[1,h],D1为背景区域,像素的灰度级为[h+1,L-1]。则D0、D1出现的概率QD0、QD1分别为
D0、D1的灰度均值ED0、ED1为
图像的灰度均值E为
D0和D1的类间方差为
θ2(h)=QD0(E-ED0)2+QD1(E-ED1)2,
式中,θ2(h)——最大值为最佳分割阈值。
由上述可知,Ostu算法必须对0~255之间的所有灰度值进行类间方差计算。所以该算法计算量大、效率低,并且当图像随机分布较为复杂时,阈值分割并不够准确,可能会出现过分割和欠分割。
3.2 改进人工蜂群优化的Ostu算法
针对Ostu算法对复杂红外图像分割精确度不足、过分割和欠分割等问题,文中将改进IABC算法应用于红外图像分割上,基于改进人工蜂群优化的Ostu算法流程,如图3所示。
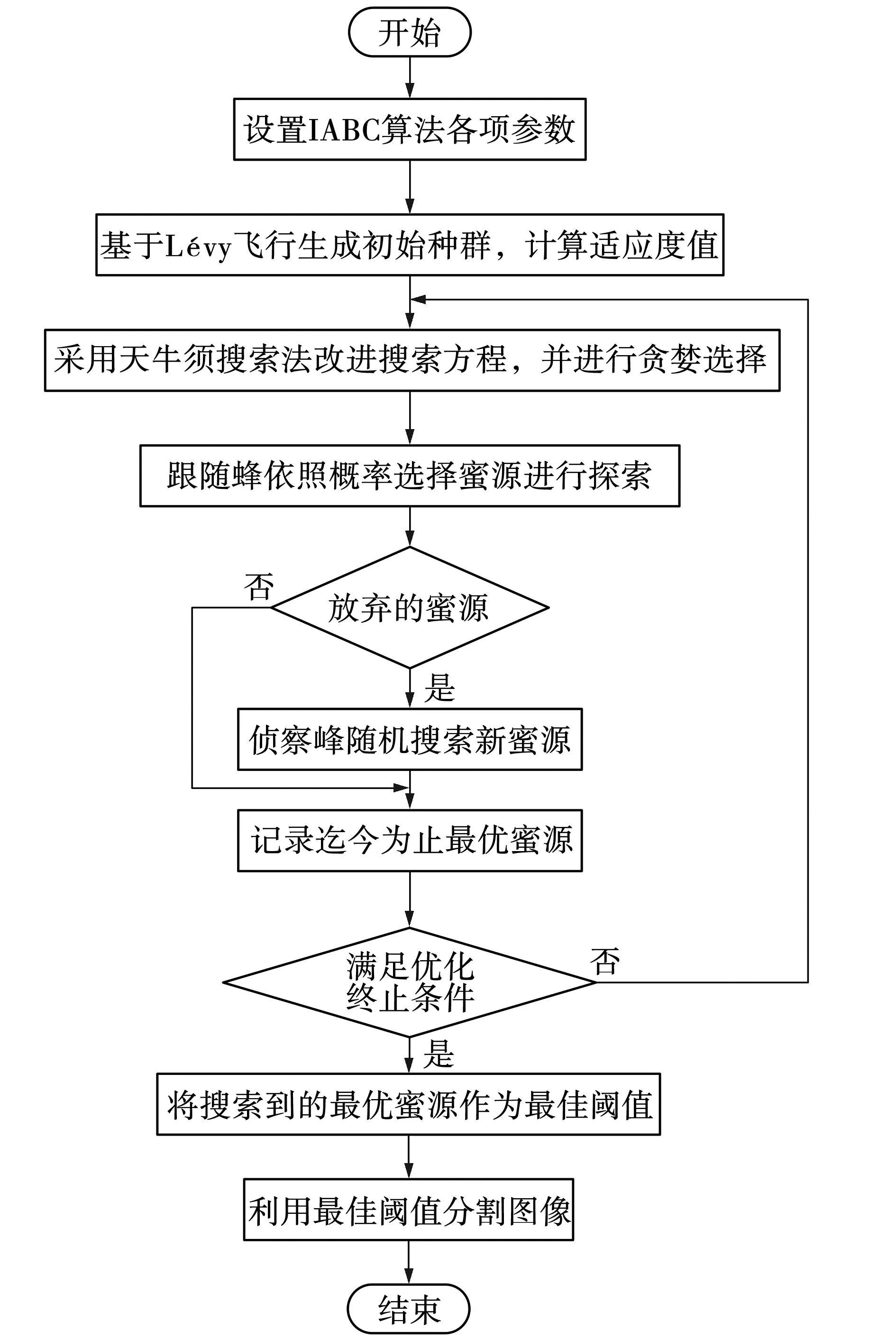
图3 文中算法流程
改进人工蜂群优化的Ostu算法具体实现步骤如下:
(1)读取红外图像。
(2)设置参数。最大迭代次数Mmax、种群数N、向量维数D。
(3)种群初始化。将Ostu函数作为IABC算法的适应度函数,并利用式(8)生成初始种群。
(4)引领蜂阶段。利用天牛须搜索法改进的搜索方程式(11)产生新解,通过比较适应度值,保留适应度大的解。
(5)跟随蜂阶段。通过式(4)判断是否跟随引领蜂进行探索,若跟随进行随机探索,按照式(2)决定是否保留解。
(6)侦察蜂阶段。当保留解开采次数达到限制后,引领蜂变为侦察蜂,按照式(1)产生新的蜜源。
(7)对所获得的解进行判断,满足条件则输出最优解,不满足跳转至步骤(3)。
(8)将最优解作为最佳分割阈值对红外图像进行分割。
(9)获得分割后的图像。
4 实验结果与分析
为了更好地验证文中算法的有效性,在Matlab实验平台上对高温套管、隔离开关、互感器和充油套管四种电力设备的红外图像进行分割实验。四种电力设备的红外图像如图4所示。将文中算法与Ostu算法、PSO-Ostu算法和ABC-Ostu算法进行对比,实验结果如图5所示。
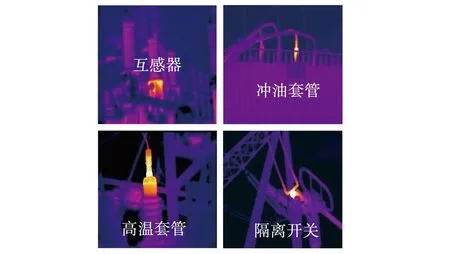
图4 四种电气设备
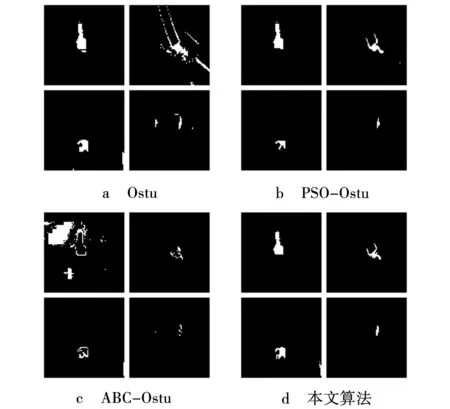
图5 实验结果
由图5可见,发现Ostu算法对四台电力设备的红外图像进行分割时容易出现过分割的情况,而ABC-Ostu算法则容易出现欠分割和背景曝光现象。PSO-Ostu算法和文中算法的分割效果较好,但是在一些细节方面,文中算法优能优于PSO-Ostu算法。
为了更加准确地评价各算法的性能,文中采用召回率(Recall)和重叠率(Overlap)作为客观指标进行评价。其中,召回率用于评价分割模型对目标区域的识别能力,当召回率越接近于1时,说明模型对正例识别能力越强[19]。重叠率也称为交并比,是图像分割中常用的客观评价指标,其大小与图像分割效果的好坏成正比[20]。召回率和重叠率公式为
式中:TP——真实正例被正确分类的像素数;
FN——真实正例被错误分类为负例的像素数,R∈[0,1]。
式中:Int——预测结果与真实结果的重叠部分的像素数;
Uni——预测与真实结果所有的像素数,O∈[0,1]。
经过对四种分割算法召回率和重叠率的测试,结果如表2所示。

表2 召回率和重叠率的测试结果
由表2可以发现,文中算法对四种电力设备的故障区域分割的召回率普遍在85%以上,比Ostu、PSO-Ostu、ABC-Ostu算法都高出10%以上,说明文中算法对电力设备的故障区域识别能力更强。从重叠率来看,文中算法相对于Ostu和ABC-Ostu算法,重叠率提高了约15%,说明文中算法对Ostu和ABC-Ostu算法的改进取得不错的效果,且文中算法比PSO-Ostu算法的重叠率高约10%。综上所述,文中算法对电力设备红外图像故障区域分割具有更好的效果,相较于Ostu、PSO-Ostu、ABC-Ostu算法表现更加优异。
5 结 论
针对电力设备相互关联导致红外图像背景复杂、难以提取故障区域的问题,提出了一种改进ABC优化的Ostu电力设备红外图像分割算法。
(1)对种群初始化过程进行改进,引入Lévy飞行增强蜂群的空间搜索能力和种群多样性,提高了算法的寻优过程,Lévy飞行可以帮助蜜蜂跳出局部最优,加速算法收敛。
(2)利用天牛须搜索算法(BAS)改进了蜂群的搜索方程,提高了蜂群的全局搜索能力,避免了陷入局部最优的问题。BAS算法可以扩大搜索范围,避免过早收敛于局部最优。
(3)通过跟随蜂和侦察蜂阶段获得的蜜源作为最佳分割阈值,对红外图像进行分割。实验结果表明,相较于Otsu算法、粒子群优化Otsu算法(PSO-Otsu)和人工蜂群优化Otsu算法(ABC-Otsu),文中算法在分割召回率和重叠率方面都取得了10%以上的提高,有效地提高了电力设备红外图像的分割效果。
