复杂环境的无人机自主感知与避障技术综述
2024-01-07李瑜强吴镇平宋平
李瑜强 吴镇平 宋平
与有人机相比,无人机在成本低、隐蔽性好以及无人员伤亡等特点,在军事、工业、农业等领域取得广泛应用。随着无人机技术的快速发展,无人机应用环境日趋复杂,国内外研究者也开展了广泛研究从而提高无人机智能化水平。传感器技术、微电子技术、人工智能技术的快速发展也为无人机智能化奠定了基础。
根据美国空军研究实验室(AFRL)对无人机自动控制水平(Autonomous Control Level,ACL)的划分,无人机自动控制水平可划分为ACL1~ACL10十个等级,“全球鹰”“捕食者”等自动控制等级较低的无人机需依靠操纵人员进行操纵或通过预编程控制无人机执行规定任务,其存在以下缺点:对操纵人员水平有较高要求,需要花费大量时间、经费进行操纵人员培训;为实现操纵控制,需保证信号的实时回传,因此可能由于敌方干扰导致无人机失控坠毁;基于预编程的无人机无法处理未知障碍物等突发情况,无法应用于陌生环境的飞行任务。
因此,进一步提高无人机自动控制水平,使其具备具有未知障碍物的陌生复杂环境自主飞行能力具有重要意义。为实现无人机在复杂环境的自主飞行,需要实现感知和规划两个任务。感知任务是指无人机基于机载传感器定位自身位置并且建立环境障碍物地图,规划是指基于建立的地图规划从起始到目标點的规避障碍物的安全路径。无人机实现环境感知并规划安全路径后,无人机便可利用控制算法控制无人机沿着规划路径规避障碍物安全飞行至目标点从而完成飞行任务。
无人机感知和规划算法已经成为无人机技术的热点研究方向并且在同时定位与建图、稠密建图、运动规划等领域取得重要进展。本文对无人机自主感知和避障技术进行综述,介绍了无人机自主感知与避障常用传感器以及关键技术,并对未来发展方向进行展望。
无人机感知传感器
无人机为实现环境感知,需要利用机载传感器探测障碍物,并融合多帧探测结果建立环境地图。常用的无人机感知传感器包括激光雷达、视觉传感器以及毫米波雷达等。
激光雷达
激光雷达发射激光束然后接收目标回波,通过将目标回波与发射激光束进行对比获得障碍物的相对位置、速度等数据。激光雷达具有以下优点:发射激光波长较短因此探测精度较高,距离分辨率可达0.1m;探测距离较远,商用激光雷达探测距离可达100-400m;相较于可见光相机受光照条件影响较小,可全天候工作;相较于毫米波雷达,抗电磁干扰能力较强。由于上述优点,激光雷达被广泛应用于无人机、自动驾驶汽车、工业机器人的环境感知任务。但其存在易受灰尘、雨雾等气候影响、质量相对较大并且价格昂贵等缺点。
双目相机
双目相机同步采集左右相机的图像,并通过计算图像间的视差并利用公式估计每个像素的深度,式中b为左右摄像头的距离,d为左右图像的视差。双目相机体积小、质量轻、价格便宜,因此被广泛应用于小型无人机以及其他小型移动机器人。双目相机测量精度较低,并且由于其基线长度较短,测量距离较短通常为5-10m,同时其受光照条件影响较大,无法全天候工作。
毫米波雷达
毫米波雷达通过天线发送并接受高频电路产生的电磁波信号,然后计算收发时间差计算目标位置、速度等参数。与激光雷达以及双目相机相比,毫米波雷达探测距离远,能够达到1-2km。毫米波雷达发送的电磁波波长较长,对雾气、烟尘等穿透性较好,因此环境适应性较好。但其探测精度较低,并且易受到其他无线电信号影响因而易被干扰。
关键技术
为实现无人机自主运动,需要实现以下关键技术:同时定位与建图技术,基于机载传感器实现无人机的准确定位;实时稠密建图技术,建立可以表征环境障碍物信息的高精度稠密地图;高实时性的路径规划技术,基于构建的稠密地图快速规划从起始点到目标点的安全可行的路径,并且平稳有效执行。
同时定位与建图技术
无人机的定位是实现稠密建图以及避障飞行的基础。全球定位系统被广泛应用于无人机定位任务,但对于室内以及其他存在GPS信号遮挡的GPS拒止环境,需要借助同时建图与定位(SLAM)技术,利用环境信息进行自主定位。
SLAM技术最早在1980年左右提出,初期的SLAM系统利用单线激光雷达作为前端传感器,基于特征点匹配实现机器人定位,由于采用单线激光雷达,因此系统仅能够提供二维的机器人位置以及姿态信息。随着激光雷达技术的快速发展,3D激光雷达日趋成熟并被广泛应用,性能优异的3D激光雷达能够实现误差在厘米级别的准确障碍物距离估计,研究者们基于其提出了成熟的3D激光SLAM系统,实现了三位环境中的准确、高鲁棒性的定位。但由于激光雷达的固有特性,激光雷达SLAM框架仍存在以下缺陷:3D激光雷达数据量大,需要大量的计算资源;对隧道、走廊等特征点较少场景,会出现数据帧无法匹配导致定位失效;高速移动会导致点云畸变,降低定位精度。
视觉SLAM技术利用视觉传感器实现位置和姿态估计。视觉SLAM系统提取不同帧画面的特征点,然后通过特征点匹配并且最小化重投影误差估计两帧间的位置和姿态变化,最后利用多帧信息构建并求解优化问题获得无人机位姿。与激光雷达SLAM系统相比,视觉SLAM系统具有质量小、成本低等优势,但其依赖于图像中的特征点,因此对于白墙等特征点稀疏场景容易导致视觉SLAM系统的状态估计失效,并且特征点的提取与匹配对计算资源要求较高,最后基于单目相机构建的视觉SLAM系统还存在尺度不确定性问题。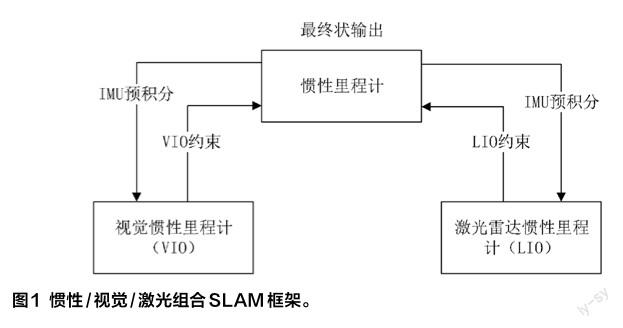
为解决激光雷达以及视觉SLAM算法存在的问题,并且进一步提高算法的准确性和鲁棒性,研究者们提出了多传感器融合算法,激光雷达、视觉传感器和惯性测量单元(Inertial Measurement Unit,IMU)是三种经典的传感器,可通过传感器融合实现优缺点互补实现高于单个传感器的SLAM系统。IMU能够测量三轴加速度和三轴角速度信息,其不受环境影响并且能够适应于快速运动场景,但其测量噪声较大,仅基于IMU数据进行积分解算位姿会由于累计差而快速发散,因此研究者们将IMU与激光雷达以及视觉传感器进行融合,解决激光雷达点云畸变以及单目相机的尺度不确定问题。常用的融合框架如图1所示,激光雷达与IMU进行融合的SLAM系统被称为激光-惯性里程计(Lidar-Inertial Odometry,LIO)系统,视觉传感器与IMU进行融合的SLAM系统被成为视觉-惯性里程计(VisualInertial Odometry,VIO)系统,部分算法将激光雷达、视觉传感器、IMU进行融合,实现了更高精度的定位效果但也提高了计算复杂度。
实时稠密建图技术
环境描述是机器人自主巡检的一个重要问题,其内容是在已知自身定位的情况下,借助传感器采集环境深度信息,构建表征机器人所在环境的地图。创建地图作为路径规划的基础。一般来说,有拓扑图和度量图两种环境描述方法。
环境描述是实现无人机自主飞行的一个重要问题,它需要解决的问题是在已知自身位置和姿态的情况下,利用传感器估计环境障碍物深度,构建表征环境障碍物的稠密地图。无人机常用的稠密地图形式包括稠密点云地图、占用栅格地图以及欧几里得距离场地图(ESDF)地图,如图2所示。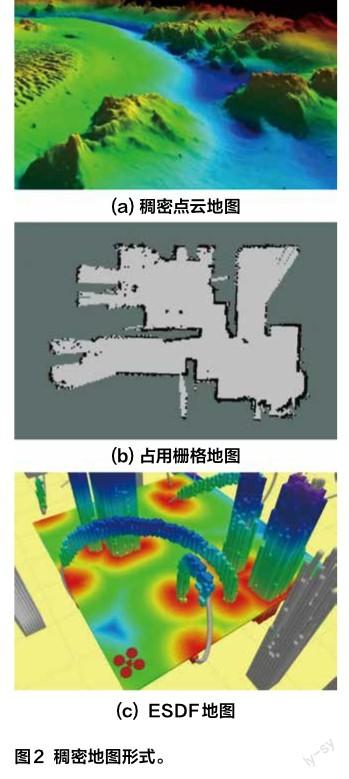
基于激光雷达以及视觉传感器能够测量障碍物距离传感器距离,从而获得障碍物点云。稠密点云地图建图算法通过融合多帧数据,利用稠密点云实现环境中的障碍物的重建。与占用栅格地图以及ESDF地图相比,稠密点云地图对障碍物的表示更为直观并且数据量相对较小,但其仅能表征障碍物表面信息而无法表征空闲区域以为未探索区域,因此无法直接用于避障任务。
占用栅格地图是一種经典的环境表示方式,其将空间划分为均匀网格单元,并且为单元赋值为不同数值来表示占用、空闲或未知等状态,实现环境的障碍物表示。占用栅格地图能够有效表示环境不同状态信息,因此可以方便得利用各种经典的路径搜索算法搜索从当前点到目标点的安全路径。但占用栅格地图存在两个问题,首先是其需要消耗较大的内存空间,当环境范围较大时,将消耗大量的内存资源。另外,部分基于优化的路径规划算法需要获得轨迹点距离最近障碍物距离的梯度信息,基于占用栅格地图计算该梯度信息将会十分耗时。
为解决轨迹点距离最近障碍物距离的梯度信息查询问题,研究者们提出ESDF地图建图算法。ESDF地图同样将空间划分为均匀单元格,但单元格记录的不是占据信息而是其距离最近点的距离,基于ESDF地图能够快速搜索得到轨迹点最近障碍物并且计算距离障碍物距离的梯度信息,从而利用优化算法对路径进行优化获得与障碍物保持安全距离的最优路径。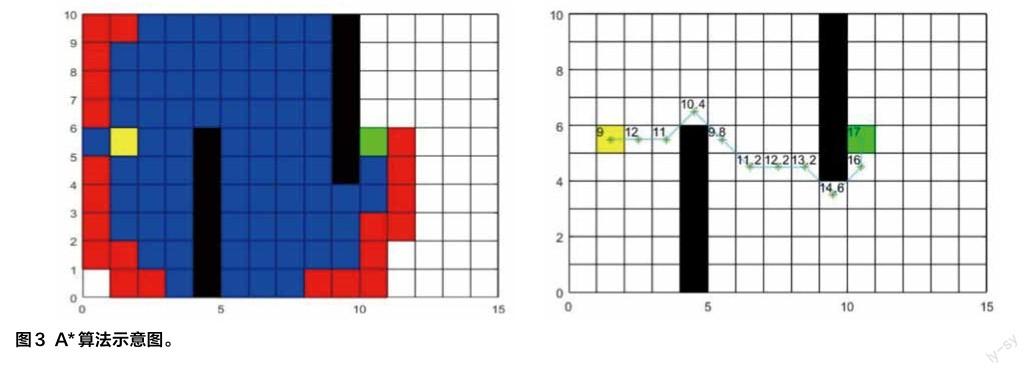
高效路径规划技术
在获取无人机定位信息并且建立环境稠密地图后,给出目标点即可通过规划算法获得到达目标的最优路径,并且通过控制算法执行该路径。无人机路径规划算法可分为全局路径规划算法和局部路径规划算法,全局路径规划算法能够快速得到从起始点到目标点的安全路径,局部路径规划算法能够生成执行全局路径的安全轨迹。
全局路径规划方法可以分为基于搜索的路径规划方法与基于采样的路径规划方法。
A*算法是基于搜索的路径规划算法的代表,其搜索效率高并且具有完备性和最优性。若路径搜索问题存在可行路径,那么A*算法一定能够搜索得到可行路径,并且其搜索得到的路径是最优的。A*算法原理如图3所示,其对当前环境中的各个节点进行遍历,并且维护一个开放节点容器以及一个闭合节点容器,将扩展出的新节点放入开放节点容器中,将待扩展的节点放入闭合节点容器,若目标节点被放入开放节点容器中,那么搜索成功。图3中,黑色方块为障碍物,黄色和绿色方块为起点和终点,蓝色方块为扩展过的节点,红色方块为待扩展节点。A*算法引入了启发函数来选择待扩展节点进行扩展,其定义为,是起点到当前节点的实际距离,为基于曼哈顿距离计算的前节点到目标点的估计距离,在每一轮扩展中,将会选择启发函数最小的节点进行扩展,这一策略使得A*算法相较于Dijkstra算法大幅提高了路径搜索效率。
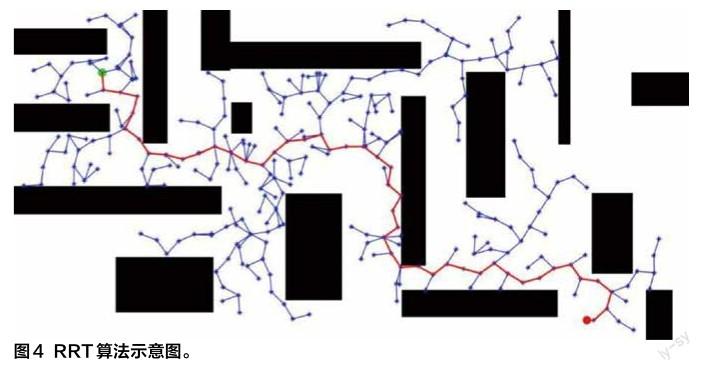
相比基于搜索的路径规划算法,基于采样的路径搜索算法在大多数环境具备更高的搜索效率。其中,快速探索随机树(Rapidly-exploring Random Tree,RRT)算法是基于采样的路径规划算法的代表。RRT算法构建了以起始点为根节点的随机搜索树,通过在环境中均匀随机采样引导随机树进行生长,当随机树与目标点的距离小于设定的阈值,搜索结束,其过程如图4所示。相较于A*算法,RRT算法搜索效率更高,但存在搜索路径不是最优路径以及搜索时间方差较大等问题。
搜索得到全局路径后,无人机在执行全局路径的过程中可能存在新发生的障碍物,此时需要利用局部运动规划算法规划局部路径进一步提高无人机的避障能力。局部路径规划算法中较为经典的算法是人工势场算法以及动态窗口算法。
人工势场法是一种经典的局部路径规划算法。该方法首先在环境的基础上建立力场,障碍物和起点对机器人有“斥力”,目标点对机器人有“吸引力”,基于构建出当前状态下机器人所受的合力,机器人在该合力的推动下行进。人工势场法结构简单,能够实现实时局部路径规划,避开障碍物,在单机器人局部路径规划中得到广泛应用。人工势场法示意如图5所示。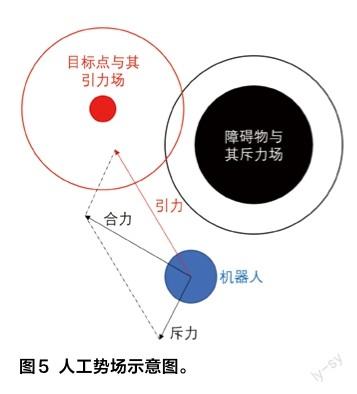
未来发展趋势
无人机感知与避障技术仍存在感知精度与鲁棒性需要进一步提高、算法计算资源要求较高等问题,基于现有的研究现状,未来的发展趋势包括:基于深度学习的无人机感知技术,基于深度学习技术进一步提高感知精度与鲁棒性;更高效率无人机感知与运动规划技术,实现感知与避障算法在低算例平台的实时运行;无人机集群感知与规划,通过共享信息提高感知算法鲁棒性并实现集群规划。
总结
本文对复杂环境的无人机感知及运动规划技术进行综述,首先介绍了无人机自主感知常用传感器及其特点,然后介绍了无人机感知与避障关键技术,包括同时定位与建图技术、稠密建图技术以及高校路径规划技术,最后对当前存在的不足以及未来发展方向进行简单分析。希望本文能够为无人机感知与运动规划技术研究者提供启发。
