面向新型电力系统物理模拟实验的快速系统原型技术
2024-01-07文劲宇张浩博林思齐左文平
文劲宇,张浩博,林思齐,向 往,姚 伟,周 猛,2,左文平,2
(1.华中科技大学 电气与电子工程学院 强电磁技术全国重点实验室,湖北 武汉 430074;2.格瑞美科技(武汉)有限公司,湖北 武汉 430073)
0 引言
传统电力系统正在向新型电力系统演进。国家能源局2023 年发布的《新型电力系统发展蓝皮书》指出,新型电力系统的高比例可再生能源和高比例电力电子设备的“双高”特性日益凸显,电力系统可控对象从以“源”为主扩展到“源-网-荷-储”各环节,控制规模呈指数级增长,电力电子换流器对电力系统的影响越来越强。电力系统形态和内涵特征正处在从量变到质变的过程中,同步发电机主导的传统电力系统正在向电力电子换流器主导的新型电力系统演进[1-2]。在新能源替代、柔性输变电、新型负荷、新型储能等多重内、外部需求的共同驱动下,电力电子技术将在新型电力系统的发、输、变、配、用各环节得到更加广泛的应用,预计到2060 年,我国电力系统中发、输、用环节的电力电子化程度将分别达到72 %、50 % 和95 % 以上[3]。因此,构建新型电力系统迫切需要开展大量的理论研究和新技术新设备开发工作,对电力系统物理模拟实验提出了很高的要求。但是,原有的物理模拟技术和设备主要针对同步发电机主导的传统电力系统,难以满足新型电力系统的需求。
电力系统物理模拟实验又称电力系统动态模拟实验,简称物模实验或动模实验,是研究和分析电力系统的重要方法之一。动模实验基于相似理论构建被研究系统的物理模型,保持原系统的物理本质,物理概念明确,能观察到难以用数学模型描述的现象或过程,可以解决在实际系统上无法对新理论进行验证、对新技术和新设备进行实验等问题[4-5]。由于电力系统对运行可靠性和安全性有极高的要求,因此许多电力系统设备在入网运行之前都需要通过动模实验的检验。电力系统动模实验是高等院校电气工程及其自动化专业本科生必须掌握的基本知识和能力,是电气工程专业研究生开展科学研究的重要方法,是众多电力设备制造厂家进行新产品开发必需的测试手段,还可以利用物理模拟优越的实验条件对电力系统现场运行人员进行培训,准确了解和掌握各种新型一次设备和二次设备的性能。
传统电力系统主要由同步发电机、电力变压器、输电线路和负荷四大类元件组成,系统特性由同步发电机主导。因此,传统电力系统动模实验的内容主要包括同步发电机(包括原动机、励磁系统、调速系统)、电力变压器、输电线路和负荷的模拟,根据需求还须对系统中其他元件(如电抗器、串联补偿装置等)进行模拟。随着直流输电技术的快速发展,针对具体的直流输电工程有时也会建立相应的动模实验系统[6-7]。电力系统动模实验技术的应用已有近百年的历史,在电力系统发展的不同阶段都发挥了重要的作用。在我国高等院校和电力行业中具有较好代表性的有华中科技大学的电力系统动态模拟实验室[8]和中国电力科学研究院的电力系统动态模拟实验室[9]。总体而言,传统电力系统由于设备的种类较少(负荷作为一个大类),物理模拟技术比较成熟。其中,主导系统动态特性的同步发电机的模拟相对复杂,变压器、线路和负荷的模拟相对简单。
传统电力系统动模实验方法也存在明显的不足,例如:在开展得最多的电力系统控制保护动模实验中,研究人员在计算机上完成了对理论方法或控制策略的全数字仿真后,通常需要自己编写相应控制器的软件代码,有时还要开发控制器硬件,才能在物理模型上进行动模实验,费时费力。实际上,此时动模实验主要关注的是应用层的控制算法,并不关注硬件,硬件只是用来测试应用层控制算法的辅助工具。因此长期以来,研究人员希望动模实验系统能够提供一个成熟的控制器硬件,同时提供这个控制器硬件的底层软件,而且用户无须重新编写软件代码,即能够将数字仿真验证过的控制算法直接编译下载到控制器硬件中,进而直接使用控制器硬件去控制被控对象,最终在实际环境中实时验证控制算法的工程实用性。近年来国外研制的dSPACE、RT-LAB等设备可以提供上述功能,但这些设备的造价非常昂贵,均为通用型数字模拟设备,并不是最终使用的真实的控制器,而且在当前的环境下存在断供的风险。传统电力系统动模实验方法存在的另外一个重要不足是:物理模拟系统一旦建立,其拓扑结构和物理特性就很难改变,难以适应快速演进的新型电力系统模拟研究需求。
为此,本文借鉴控制领域常用的快速控制原型(rapid control prototype,RCP)技术的思想,根据新型电力系统由电力电子换流器主导并快速演进的特点,提出了面向新型电力系统动模实验的快速系统原型(rapid system prototype,RSP)技术。RSP 技术解决了传统电力系统物理模拟技术费时费力和难以满足新型电力系统需求的问题,可以让研究人员聚焦研究新型电力系统相关问题本身,极大提高研发效率,降低研发成本。
1 RCP技术
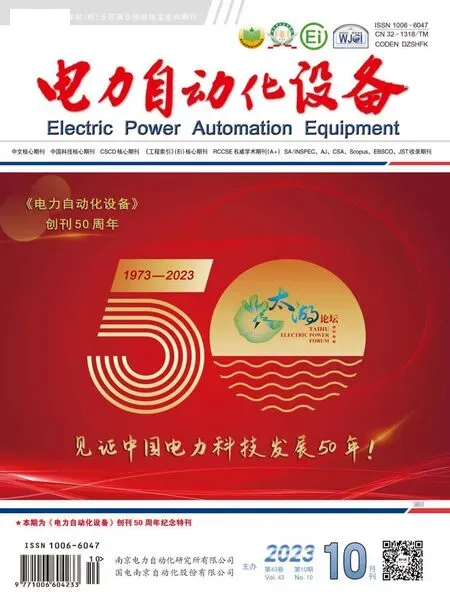
RCP 技术源自制造业的快速原型(rapid prototype,RP)技术。RP 技术的主要思想是尽可能地在虚拟环境中进行产品设计,达到缩短产品开发周期、降低开发费用的目的。RP 技术的应用可以显著缩短新产品的上市时间,节约新产品开发和模具制造的费用,已在航空航天、汽车、医疗、家电、军事装备等领域得到广泛应用。将RP 技术引进电子控制器的设计和控制算法的实时测试即可得到RCP 技术:在控制器开发的初期阶段,快速地建立控制器物理模型,并对整个系统进行多次离线和在线的测试来验证控制方案的可行性,这个过程称为RCP[10],如附录A 图A1 所示。RCP 由数字仿真器和原型控制器组成,原型控制器包括一个成熟的控制器硬件以及驱动控制器运行的底层软件(类似于操作系统)。用户能够直接将数字仿真验证过的控制算法编译下载到原型控制器中,并用原型控制器直接控制被控对象,在实际环境中实时验证控制算法的工程实用性。
可见,RCP 技术可很好地解决前述传统电力系统动模实验费时费力的问题。实际上RCP 技术也是一种基于模型的控制器设计开发模式。传统的控制器开发模式分为需求、设计、实现、测试4 个阶段,这4 个阶段彼此独立,在开发具有复杂功能的控制器时,整个过程效率低、周期长。基于模型的开发模式把上述4 个阶段联系起来,将所有工作建立在统一的开发-测试平台上,从需求阶段就可以验证,并做到持续不断地修改与测试,由此针对每个阶段暴露出的缺陷及时进行纠正;代码的自动生成减少了人工编写代码产生的错误,使开发人员从繁琐的代码编写任务中解脱出来,将主要精力放在控制算法的研究及性能测试上,大幅缩短了开发周期,降低了开发成本[11]。常见的RCP 技术包括基于dSPACE 或RT-LAB的RCP等。
2 RSP技术
将RCP 技术用于电力系统动模实验,可以构建图A1 所示的动模系统。其中,对于传统电力系统,真实被控对象主要是同步发电机、电力变压器等物理模型;对于新型电力系统,真实被控对象则还需要考虑电力电子换流器的物理模拟。与同步发电机和电力变压器的拓扑结构相对固定不同,电力电子换流器的拓扑结构多种多样,例如风电、光伏发电、柔直输电、锂电池储能等的换流器拓扑结构各不相同,即使是具备故障穿越能力的模块化多电平换流器(multi modular converter,MMC),其子模块也有全桥型[12]、四电平级联型[13]、五电平级联型[14]等不同结构,如附录A 图A2所示;而且,换流器本身也在快速发展过程中,各种新的拓扑结构在不断被提出。因此,如果针对每种拓扑的换流器都要研制一个物理模型以配合RCP 开展电力系统动模实验,系统模型数量将非常庞大,费时费力,灵活性差。
电力系统采用的各种电力电子换流器虽然拓扑结构各异,但其均由多个电力电子器件及其他外围辅助器件通过串并联的方式组合而成,电力电子器件主要有全控型(如绝缘栅双极晶体管)、半控型(如晶闸管)和不控型(如二极管)3 类,电力电子器件和其他外围辅助器件经常设计成模块式(如MMC 的子模块)。因此,参照RCP 技术的思想,针对电力电子换流器物理模拟,本文提出快速被控对象原型(rapid object-controlled prototype,ROP)技术。ROP 技术首先建立“子模块”的物理模型,即原型子模块。原型子模块中电力电子器件和外围辅助器件的连接结构与真实子模块相似,各个原型子模块之间可通过导线采用类似“搭积木”的方法实现不同的互联方式。此外,原型子模块内部可以通过“软件定义”的方式实现子模块不同拓扑的变换,无须重复搭建硬件电路。例如,对于图A2(a)所示的全桥子模块拓扑,通过软件更改内部开关器件的触发程序,或增设软件控制的旁路继电器,可以将其变为半桥子模块拓扑。因此,基于原型子模块,用户采用“搭积木+软件定义”的方式即可快速构建出各种拓扑结构的电力电子换流器物理模型的ROP。
RSP 技 术 基 于RCP 和ROP 构 成,如 图1 所 示。与图A1 所示的RCP 技术相比,RSP 技术同样由数字仿真器、快速原型控制器和被控对象组成;不同的是,RSP 引入了ROP 思想,基于ROP 技术可以快速构建各种拓扑结构的换流器及系统物理模型,满足新型电力系统开展动模实验的需要。
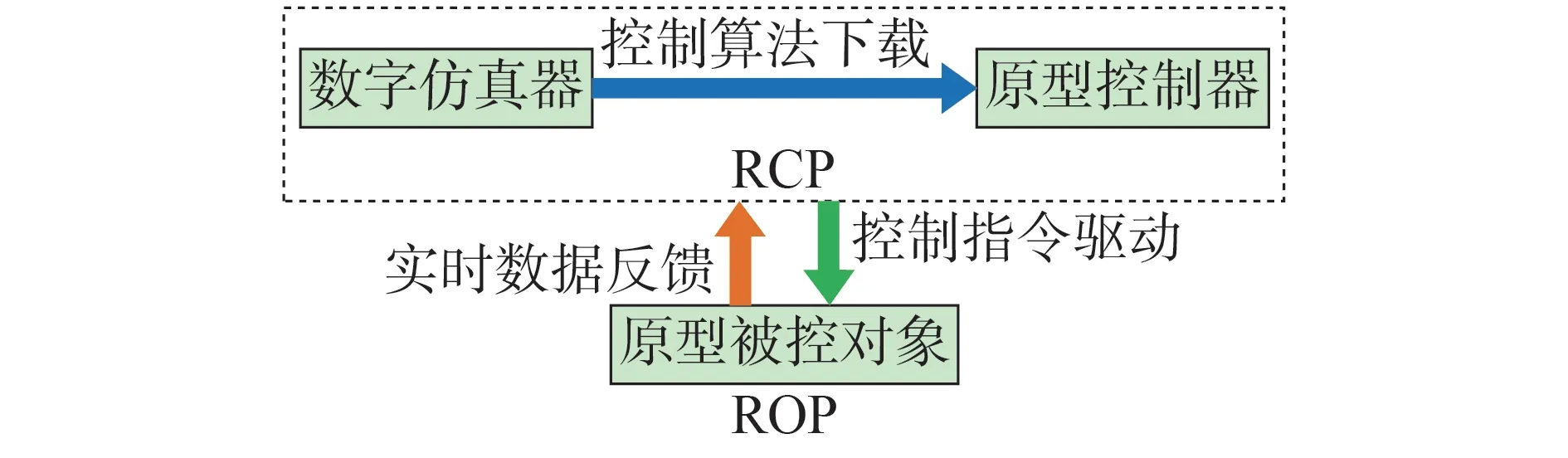
图1 RSP技术Fig.1 RSP technology
3 RSP技术的实现
RSP 技术主要由数字仿真器、原型控制器和原型被控对象组成。下面针对新型电力系统动模实验的需求,提出各部分的实现方案。
3.1 数字仿真器
数字仿真器由计算机和电力系统数字仿真软件构成。计算机通过以太网与原型控制器连接。数字仿真软件一般基于MATLAB/Simulink 平台构建,可以选用MatPSST[15]。相比常见的开源工具箱,MatPSST 旨在实现灵活的仿真模型搭建,方便连接实时仿真器开展实时仿真验证[16-17]。附录A 图A3给出了MatPSST 整体架构,利用MatPSST 建立模型主要分为2 个环节:初始化过程和动态模型构建。在初始化过程中,用户需要将电力网络、各类设备参数和仿真参数输入初始化m 文件中的数据矩阵中,完成系统初始值计算。MatPSST 动态模型在Simulink 图形用户界面(graphical user interface,GUI)中进行构建,利用Simulink 模型库和MatPSST 自定义的电力设备模型库,用户可以结合新的控制算法快捷搭建仿真模型。
在MatPSST 中完成建模之后,用户可以直接利用MATLAB 内置求解器和工具箱开展动态仿真、小干扰分析、控制器优化设计等,无需任何附加程序。此外,MatPSST 的矢量仿真功能可对整个风电、光伏等新能源场站的机组进行详细矢量建模。矢量建模即将仿真模型的状态变量及各类参数用矢量进行表示与计算[18-19]。以包含M台风机的风电场模型为例,矢量的结构和矢量模型的构成如图2 所示。图中:i和u分别为电流矢量和电压矢量,均为M维;Ai(i=1,2,…,L1,L1+1,…,L2,…,M,L1、L2分别为第1、2层风机总数)为第i台风机Wi的变量集合,在进行矢量建模时,可将分散在各风机模型中的变量用一个M维的矢量A集中表示。进一步,由于同一风电场内的风机拥有相同的方程,因此可将整个风电场内的风机用一组基于矢量的方程表示。从而只需使用一个模块即可实现整个风电场内机组的并行仿真,避免了大量的重复过程。风电场内的集电线路也可采用相同方法,通过构建连接矩阵的方式,将分散在各条线路模型中的变量集中成矢量以实现并行仿真。该方法可进一步推广到光伏电站等其他新能源场站。

图2 矢量结构与基于矢量的风电场模型Fig.2 Structure of vector and wind farm model based on vector
综上所述,通过构造表征场站拓扑的连接关系矩阵,实现多台同构异参的机组模型和控制回路并行仿真计算,大幅提升了仿真计算效率。相比采用传统单机聚合模型进行场站建模的方法,该方法保留了新能源场站内部不同单元间运行工况与参数的差别,可以仿真分析场站中机组之间的相互影响,提高了仿真精度[19]。
利用MatPSST 自带的转换下载功能,可将控制算法源代码编译转换为原型控制器的软件代码并下载烧录至原型控制器中,在动模实验过程中还可以接收来自原型控制器的实时信息,对整个动模实验系统进行监控。MatPSST 同样也可以支持dSPACE、RT-LAB等实时仿真系统。
综上,MatPSST 拥有多样求解算法,可应对复杂系统仿真需求;利用GUI建模,降低了对使用者的编程要求;提供了灵活的自定义功能,方便结合新的控制算法。同时,MatPSST 与RSP 相结合,能够支持实时仿真系统,实现在硬件平台的应用。附录A 表A1对比了MatPSST 与常见开源工具箱的功能。可见,MatPSST 克服了常见开源工具箱求解器较少、基于编程建模、灵活性较差等缺点,更适用于RSP 平台。且MatPSST 可提供基于开源软件SciLab 和基于国产软件SimuNPS 的版本,不依赖MATLAB/Simulink平台,实现自主可控[20]。
3.2 原型控制器
原型控制器采用插件式标准控制机箱结构,主要根据电力电子换流器动模实验控制的控制需求进行设计,同时兼顾同步发电机动模实验的控制需求。原型控制器应有超强运算性能,核心处理器可采用Xilinx ZYNQ-7020 SOC 架构,以满足电力电子换流器复杂控制算法的实时控制需求;应有高速脉宽调制(pulse width modulation,PWM)输出,支持百kHz以上的高速PWM 信号和百纳秒级以下高速低延时,以满足碳化硅、氮化镓等下一代宽禁带电力电子器件的高速控制需求;应有足够的光/电控制信号输出通道,实现对大规模电力电子系统(MMC、高压级联储能等)的实时控制;并具有丰富的工业通信接口,如以太网、RS485、CAN、RS232等,满足工程上换流器控制需求;还应有在线调整参数、能量管理、故障录波等功能。按照上述方案研制的通用型原型控制器RCP 样机见附录A 图A4。数字仿真器仿真验证过的控制代码可以直接编译下载到RCP 控制器中,控制器可控制原型被控对象,也可直接控制真实被控对象。
需要说明的是,本文设计的原型控制器与通常意义上的基于dSPACE、RT-LAB 等的RCP 控制器是不同的。dSPACE 等RCP 控制器严格意义上是一种实时数字控制器,其均采用不同于常规实际控制器的专用硬件架构,通过输入输出接口与被控对象实现实时控制和信息交互,仅验证了软件代码流程的正确性。本文所提的原型控制器则是采用与实际控制器相似的硬件架构,类似于真实的控制器,可以验证软件代码的正确性,软件代码可以直接移植到真实控制器中,或直接将原型控制器应用于实际工程中。
3.3 原型被控对象
以在国内外得到广泛应用并仍在快速发展中的MMC 物理模拟为例,说明原型被控对象的实现方法。MMC 主要有半桥型、全桥型和全-半桥串联型等拓扑结构[21],因此可以首先设计原型全桥子模块,如附录A 图A5 所示。所有器件集成在一块标准3U插件上,原型全桥子模块的拓扑结构如图3(a)所示。由图可见,通过软件定义全桥子模块的工作模式,或者通过调整全桥子模块功率端口的“搭积木”方式,亦或通过控制继电器的开关状态,即可实现子模块的全桥与半桥的拓扑结构切换,半桥子模块拓扑如图3(b)所示。附录A 图A6 给出了五电平全桥MMC原型的构建过程。MMC 桥臂机箱为3U 标准机箱,包括8个原型子模块;8个原型子模块之间通过导线串联,从而构成了一个MMC 相单元(桥臂机箱);最后将3 个桥臂机箱并联构成一个完整的五电平全桥MMC 原型。综合上述分析,原型被控对象的构建采用“硬件搭积木+软件定义”的方式,能够方便快速地构造出各种拓扑结构的原型换流器ROP。
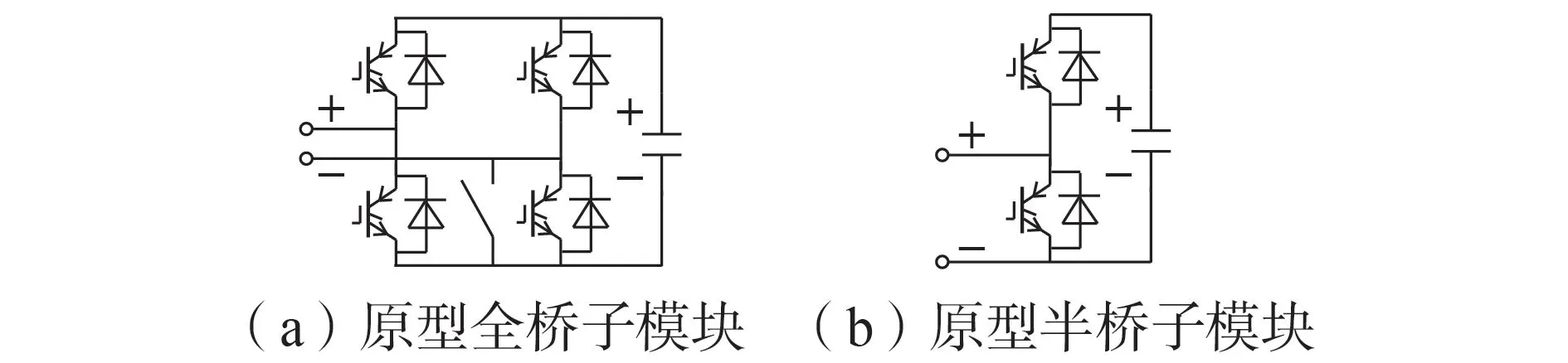
图3 原型全、半桥子模块拓扑结构Fig.3 Topology structure of full- and half-bridge submodule prototypes
根据电力系统动模实验的需要,在ROP 的设计过程中需要考虑高可靠性,包括:关键元器件均应有足够的安全裕度,功率模块采用高性能的现场可编程门阵列控制芯片;通过热仿真设计优化,尽可能减小功率模块的运行温度;通过功率回路布局布线设计优化,尽可能减小杂散电感,功率流通路径尽量短;采用主动能量控制[22-23]等方法实现高性能的软硬件保护,提升装置的抗冲击能力。除此以外,ROP还应该具备基于dSPACE 和RT-LAB 等实时仿真器进行控制的能力。
上述数字仿真器、原型控制器和原型被控对象共同构成了适用于新型电力系统动模实验的RSP,如附录A 图A7所示。需要说明的是,传统电力系统动模实验系统中的同步发电机、电力变压器等也都是本文定义的原型被控对象,本文提出的原型控制器也可以直接控制这些被控对象进行动模实验。
4 基于RSP的柔直输电动模实验
基于RSP 的理念和各部件模型,可以非常方便地构建柔直输电的动模实验系统RSP,为开展柔直输电与柔直电网的研究提供高性能、高效率、抗冲击、易使用的研究设备和平台。
为验证基于RSP的柔直输电动模实验系统的实用性和操作便捷性,本章从拓扑和控制自定义2 个方面开展了动模实验。柔直输电系统的拓扑结构如图4 所示,附录A 表A2 为系统实验参数。其中,柔直换流器采用3.3节所提原型子模块构建,可通过软件定义子模块拓扑。同时,柔直输电系统RSP 配置数字仿真器MatPSST 和原型控制器,可实现控制算法的快捷下载。
图4 柔直输电系统的拓扑结构Fig.4 Topology structure of flexible DC transmission system
4.1 拓扑“软件定义”功能实验验证
首先,在MatPSST 中搭建了图4 所示的仿真系统模型,数字仿真验证通过后,将控制源代码编译下载到原型控制器中;然后通过“软件定义”的方式,将MMC 中原型子模块的拓扑定义为全桥型拓扑,并采用文献[24]提出的主动限流控制策略。在图4 所示MMC2出口处施加直流短路故障(闭合短路开关S1),全桥型MMC 直流短路故障动模实验结果如附录A图A8 所示。
图A8 分别给出了系统直流电压以及直流电流的实验波形图。由图可知:系统稳态直流电流为4 A;故障发生后经过200 μs 延时,主动限流控制器开始动作,快速限制故障电流。直流故障期间,电流峰值为13 A,最大电流变化率为45 A/ms。初步验证了全桥MMC拓扑和主动限流控制的有效性。
4.2 控制自定义功能实验验证
现有柔直输电系统均采用双闭环矢量控制,未能充分发挥子模块电容的储能能力。利用柔直输电系统RSP 中的MatPSST 仿真器搭建用户自定义的主动能量控制[22],并将控制算法编译下载到原型控制器中开展动模实验,以验证MMC 直流电压Vdc以及子模块电容电压VC的解耦控制能力。实验结果如图5所示。
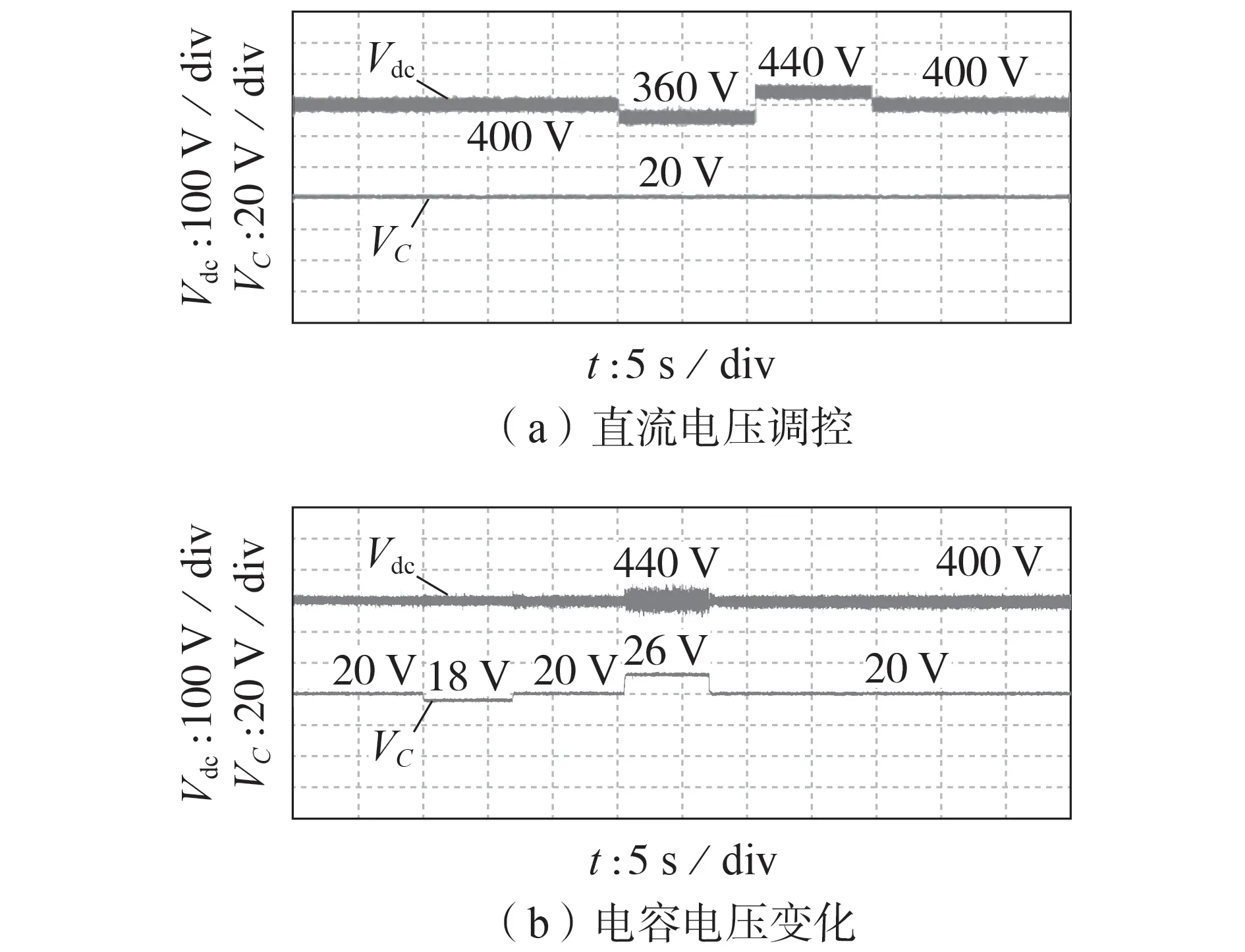
图5 主动能量控制下的实验结果Fig.5 Experimental results of active energy control
图5(a)、(b)分别给出了单个全桥MMC 样机原型采用主动能量控制时对直流电压和电容电压进行调节的实验结果。可见,直流电压和子模块电容电压均能够进行独立调控,验证了主动能量控制具备子模块电容电压和直流电压的解耦调控能力。
综合上述2 种动模实验过程和结果,与传统动模实验方法相比,柔直输电系统RSP 可通过软件自定义的方式快速构建相应拓扑的样机原型,无须重复搭建硬件电路。因此,利用RSP 技术开展动模实验时,仅需要1 台实验装置即能满足多种拓扑下的实验需求,缩短了物理动模实验周期。同时,所提出的RSP技术可针对实验系统和控制策略开展高精度数字仿真验证,且无须手写代码即可利用MatPSST自动快速构建控制算法的源代码并编译下载到原型控制器中,能够适应控制算法的迭代更新,具备状态变量和参数的可见、可知、可控、可互动能力。
5 新型电力系统的RSP技术
RSP 技术可通过软件定义方式快速构建各种换流器及系统拓扑,为构建换流器主导的新型电力系统动模实验平台提供了解决方案。
由第3 章分析可知,本文提出的RSP 技术采用MatPSST 开展数字仿真,其图形化建模和矢量仿真的功能使得仿真系统的建模和扩展更加便捷和直观;同时,原型控制器采用工程控制器架构,具有较充裕的算力和接口交互能力,能够适应复杂控制策略,具备工程可移植性;此外,本文提出的原型被控对象基于“硬件搭积木+软件定义”的方法,可以在不同实验场景下快速构建所需要的物理拓扑结构,无须重复搭建硬件电路。因此RSP技术在软件和硬件上均具备较好的扩展性,可以满足新型电力系统动模实验拓扑和场景不断变化对实验平台的软、硬件需求。
基于RSP的新型电力系统动模实验平台及其构建方法如图6 所示。针对大型电力系统,可先将其划分为多个子系统(如分布式发电、海上风电、直流输电等子系统),并在MatPSST 中建立各子系统的数字仿真模型,开展理论分析和数字仿真验证研究;同时,针对不同子系统,设计相应的原型子模块,基于原型子模块构建不同拓扑的原型换流器ROP,将MatPSST 仿真验证过的控制算法直接编译下载到相应的原型控制器RCP 中,实现新型电力系统子系统RSP 的构建;最终将各子系统RSP 进行互联,完成整体新型电力系统RSP 的构建。与上述方法类似,还可以构建基于RSP 的构网型微电网动模实验平台,如图7所示。

图6 基于RSP新型电力系统动模实验平台Fig.6 New power system dynamic simulation experimental platform based on RSP
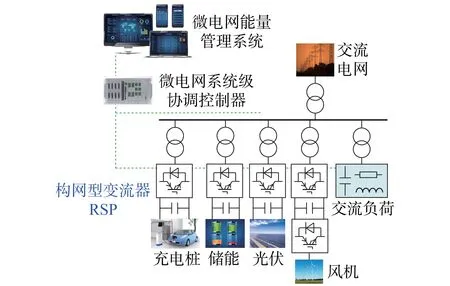
图7 基于RSP的构网型微电网动模实验平台Fig.7 Grid forming microgrid dynamic simulation experimental platform based on RSP
6 电力系统各类仿真技术分析
RSP 并不只是一种新型动模实验技术,更是一种面向新型电力系统仿真研究的新理念和方法体系。电力系统仿真包括数字模拟(数模)仿真和物理模拟(物模)仿真2 类,仿真对象主要包括控制器和被控对象2 类,将其进行组合,可以得到如下的仿真模式:
1)数模控制器+数模被控对象,为全数字仿真;
2)数模控制器+物模被控对象(或真实被控对象),为半实物仿真,其中的数模控制器必须具有实时控制能力,如dSPACE、RT-LAB 等,RCP 技术通常就属于这一类仿真研究方法;
3)物模控制器(或真实控制器)+数模被控对象,为硬件在环仿真,其也是一种半实物仿真,其中的数模被控对象必须具备实时仿真能力,如RTDS、dSPACE、RT-LAB等[25];
4)物模控制器(或真实控制器)+物模被控对象(或真实被控对象),该方法即为本文提出的RSP 技术,控制器和被控对象均采用物理模拟,当两者均为实际设备时,即为在实际系统中进行实验。
由此可见,RSP 是一种“所见即所得”的研究方法,即在RSP 上获得的仿真结果与在实际系统上获得的仿真结果具有高度的相似性。RSP 技术实际上是将前3 种仿真模式融合为一体,在用于科学研究、产品开发和入网验证时,可以让研发人员聚焦问题本身,研究成果和产品可直接应用于工程实际。基于RSP理念和技术可以建成一个企业级别的仿真环境及工程技术实践平台,真实灵活仿真新型电力系统的各种特点,可见、可知、可控、可互动,适合用于高等院校电气工程及相关专业本科生和研究生(特别是卓越工程师)的培养以及现场运行人员培训,使之在更为真实的环境中开展研究,得到更加符合实际的研究成果。
7 结论
新型电力系统是换流器主导的系统,构建新型电力系统,需要研究各种电力电子换流器拓扑及其控制技术。MatPSST 是基于MATLAB 开发的一套成熟的、功能强大、易学易用的新型电力系统数字仿真工具箱,适用于中小规模电力系统的教学和研究。RSP 技术是一种面向新型电力系统仿真研究的全新理念和方法,包括数字仿真器、快速原型控制器和快速原型被控对象,RSP 技术为新型电力系统教学、科研、开发、运行提供了方便快捷的手段,可望加快相关技术的进步和应用。
附录见本刊网络版(http://www.epae.cn)。