制动工况下风电偏航摩擦片声学特性研究
2024-01-06李丽霞王其良王建梅
候 建,李丽霞,张 毅,王其良,王建梅,2
(1.太原科技大学 重型机械教育部工程研究中心,山西 太原 030024;2.山西工程技术学院,山西 阳泉 045000)
0 前言
随着我国经济的发展和科技的进步,风能、氢能和太阳能等清洁能源已成为未来发展趋势。发展风电技术对于国家调整能源结构、应对气候变化、实现“双碳”战略具有重要意义。偏航制动器作为大型风力发电机组上的重要设备,可以实现风电机组精准对风,保障风力发电效率,是机组高效平稳运行的关键组成部分。
迄今为止,国内外学者已经对盘式制动器做了大量研究。Ahn S等[1]通过改造盘式刹车片的形状以减小摩擦界面的不均匀接触,利用有限元模型得到了接触应力的分布,并通过现场试验得以验证。刘旭[2]对简化的制动系统进行应力分布分析,得到了最大应力的位置。王岳峰等[3]建立了偏航制动器的热力耦合有限元模型,得到了偏航压力、偏航速度、摩擦系数等因素对热应力的影响。CH-Yoo等[4]利用杠杆原理设计了一种检测偏航制动扭矩的装置,并通过实验验证了装置的可行性。徐晓光[5]利用摩擦磨损实验探究了不同含量珠光体对风机制动性能的影响,结果表明珠光体含量越高,摩擦片的摩擦性能越高。Miranda M H P等[6]针对摩托车盘式制动器尖叫问题,建立了制动器有限元模型,并探究了材料参数和操作参数对噪声产生的影响。S. W. Kung等[7]对制动器各部件进行自由模态求解,结果发现制动块是影响制动器稳定性最大的部件。潘公宇等[8]利用三维扫描技术和SOLIDWORKS对制动器建模,通过优化刹车片中的粘弹性成分来实现降噪,并以Dyno台架试验验证了仿真结果。A. Bajer等[9]通过对摩擦阻尼的研究发现,忽略摩擦阻尼的不稳定模态大于实际情况下的不稳定模态。常庆斌等[10]通过采用活塞偏心布置及加强卡钳支架的方式,改善摩擦片偏磨导致的制动低鸣噪声问题。管迪华等[11]采用能量馈入法对制动盘和摩擦片的接触制动噪声进行了研究,通过改变摩擦片的倒角、摩擦因数或材料参数等对抑制制动噪声均起到有效的作用。吴奕东等[12]采用能量馈入法对非对称制动压力下的制动器开展研究,发现通过提高制动压力的对称性可以提高复特征频率,从而使低频制动尖叫难以激发。吕辉等[13]引入随机区间和区间不确定参数对制动器的振动稳定性进行研究,甄别了不确定性参数对系统稳定性的影响,从可靠性角度提出改善稳定性的措施。
目前研究人员对于高速制动工况研究较多,但对低速重载工况下的制动过程和偏航制动器的噪声研究较少。偏航制动系统在低速重载工况下运行时制动器结构会产生振动,严重时会导致其他部件产生共振,影响制动器的寿命,极大增加了偏航制动系统的维修成本,同时摩擦系统的尖叫问题还会造成噪音污染影响居民的生活。因此,分析偏航系统的振动噪音问题对于风电机组的运行具有重要意义。
1 风力发电机偏航制动器模型
1.1 偏航制动器有限元模型
风力发电机的偏航制动系统是机组关键组成部分,如图1所示[14],其功能是确保风机的精准对风,避免风能损失。偏航制动性能的好坏决定了偏航系统的稳定性和整个风电机组运行的安全性。由于制动器噪声问题复杂,本文以制动器的关键部件作为研究对象,根据偏航制动器实际尺寸创建三维几何模型,利用有限元法进行声学模拟。

图1 偏航系统结构图[14]
1.2 偏航制动系统的运行工况与材料参数
根据文献[15]中偏航制动器的运行工况,得到偏航压力、偏航速度和摩擦系数的取值范围,将文献中的参数作为模拟中偏航制动器的运行工况,如表1所示。制动盘的材料为Q345E,摩擦片的材料为复合树脂基,两者的材料参数如表2所示。

表1 制动器运行工况

表2 摩擦副材料性能参数
1.3 制动器空气域模型
在对偏航制动器进行动力学模拟后,为了模拟周围的辐射噪声,需要在偏航制动器外部提前创建一个空气域。为了简化计算量,空气域模型要尽可能地小,如图2所示。在耦合动力学与声学时,假设单项耦合,即偏航制动器的振动会影响周围的空气,但忽略声波对结构本身的影响。声学域的作用是将动力学参数映射到声学域的内部边界网格上,对声学域进行无反射全吸收处理,进而获得不同频率下近声场的辐射声压级。为了了解噪声辐射特性,设置场点获得远处声场的辐射图。

图2 偏航制动器空气域模型
2 声学方程与声学边界条件
2.1 声学基本方程
基于声学理论,声学方程的任何一种形式都可以从流体的连续方程、物态方程、运动方程、能量方程推导而来,对方程作不同的假设,可以得到不同的声学方程。基于运动介质声学的基本方程,假定定常流动下的流体密度、速度、压力、熵均为常数,外部作用于流体的力为零,得到均匀流中传播的基本声学方程[16]:
(1)
式中,ρ0为定常流动下流体的密度;c0为定常流动下的声速;q为流体质量源;t为时间;p为流体压力;p0为定常流动下的流体压力。
根据傅里叶变化求解声学频域形式下的声学基本方程:
(2)
式中,k为波数,k=w/c=2πf/c;w为角频率;f为频率,对应的波长λ=2/k=2πc/w=c/f。
2.2 边界条件
在求解声学问题中,为了解决结构网格和声学网格不匹配的问题,将结构网格上的参数映射到声学边界网格上,通过定义声学边界条件,求解得到声学方程的唯一解。本文采用的位移边界条件是速度边界的变形。基本声学边界条件为以下三种[17]:
(1)声质点速度边界
声质点速度边界的形式为
(3)
(2)声压边界条件
声压边界条件形式为

(4)
(3)阻抗边界条件
阻抗边界条件形式为
Ap=Bvn=C
(5)
式中,A、B、C为已知值,阻抗边界条件是通过对声压和声质点速度的关系来约束边界条件,阻抗边界条件的物理意义是声学边界网格的吸声系数或反射系数。
2.3 声学辐射模型
偏航制动盘与摩擦片在制动过程中使得制动系统产生剧烈振动,导致偏航制动器发出噪音。声学有限元法仿真是将制动器的结构弹性域和噪声辐射的流体域离散,再通过声学波动方程和力学方程求解得到结果。为了揭示制动盘和摩擦片的声场分布规律,文中采用声学有限元法建立偏航制动器的声学辐射模型。声学求解的系统方程[17]为
(6)
式中,Ka为声学刚度矩阵;Ca为声学阻尼矩阵;Ma声学质量矩阵;pi为节点声压;Qi为声源向量;Vni为输入速度向量;Pi为输入声压向量;Fai为声学激励;ω为角频率。
本文中的声学辐射仿真方法采用有限元法,辐射边界条件采用AML技术。AML技术是自动在声学辐射边界设置一层网格吸收声学量,从而确定方程组唯一解。
2.4 声的合成
噪声通常包含多种声源辐射声音的合成,或者一个声源包含不同的频率。为了方便对噪声进行评估,故将噪声进行合成,计算总声压级。一般噪声均为不相干波,适用于能量相加法,该方法是当两个计权后的声压级相互叠加时,其总声压级由较大的那个声级决定,因此总声压级可由式(7)确定:

(7)
式中,L总为叠加后的总声压级;Li为各个独立的噪声源或者各频带上的声压级。
2.5 制动器不稳定频率
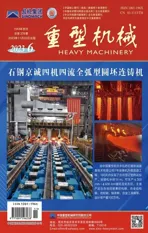
为了确定声学仿真中偏航制动器的声学求解频率范围,采用复模态法求解偏航制动器的不稳定模态,根据不稳定模态的频率范围确定声学求解的最大频率。制动器不稳定模态分布如图3所示,从图3看出,不稳定模态集中在3~6 kHz,在该阶段的正实部较大,系统最不稳定,尖叫发生的概率较大,噪声的强度较大[18],故选取6 kHz为声学仿真最大频率。
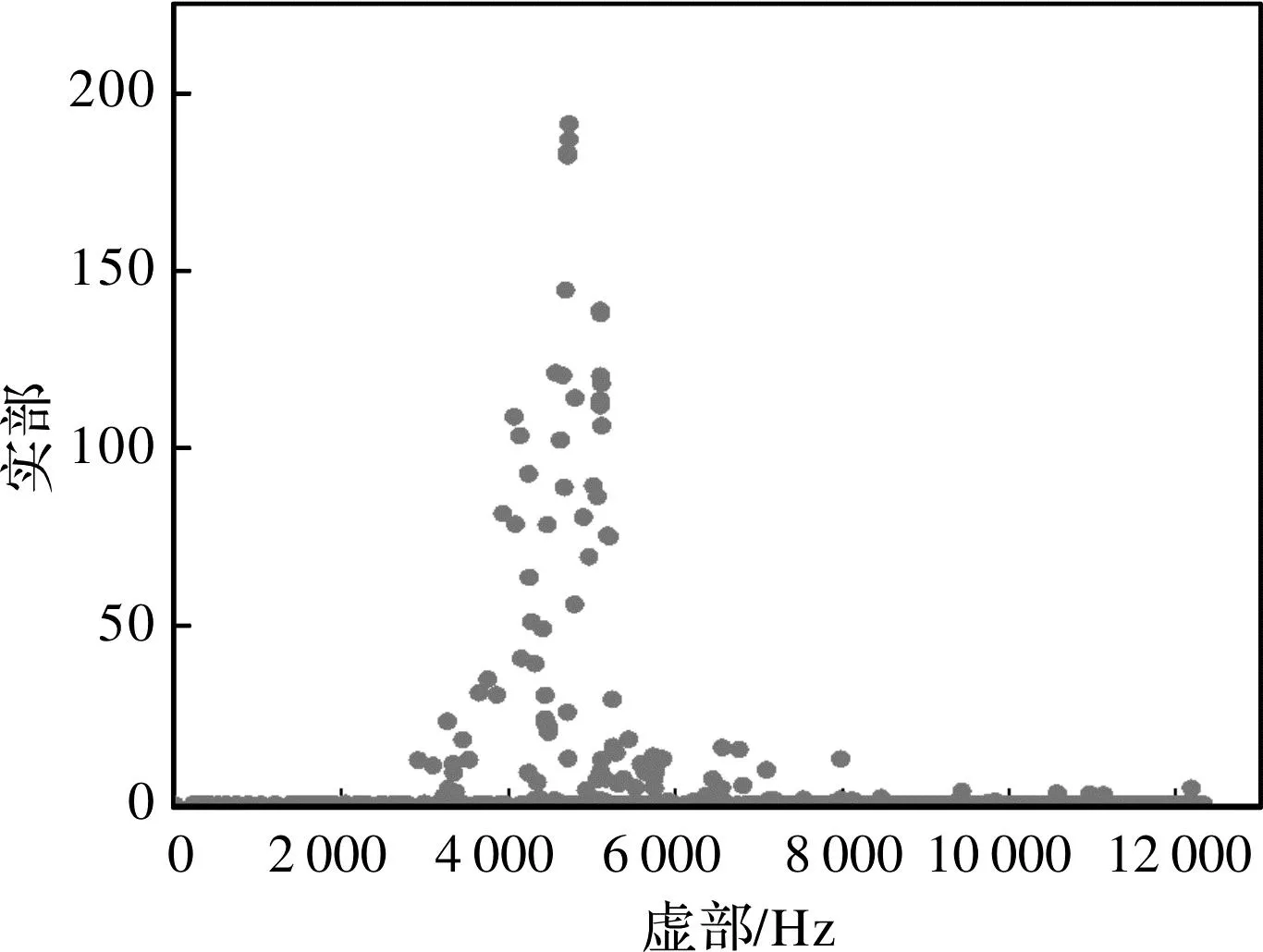
图3 偏航制动器不稳定模态分布
3 正交试验设计
正交试验是根据Galois理论从全面试验中选出部分具有代表性的水平组合进行试验的设计方法,它能够简化试验,找出最优的水平组合。为了分析不同偏航压力、偏航速度、摩擦系数下对制动系统声压的影响,通过设计正交试验法得到不同工况下系统的总声压级。根据表2中的工况并结合常用正交表,选取L933正交表设计正交试验,如表3所示。

表3 正交试验表
4 计算结果讨论与分析
4.1 声场分布规律
为了研究声辐射的分布规律,在声学网格上设置场点,以制动盘中心为原点在水平的正方向上由中心向外分别设置10个点,在垂直方向的负方向上(风力发电机的下方)也设置10个点。
图4为p=4 MPa、v=0.30 rad/s、μ=0.32时各方向上的总声压变化曲线。
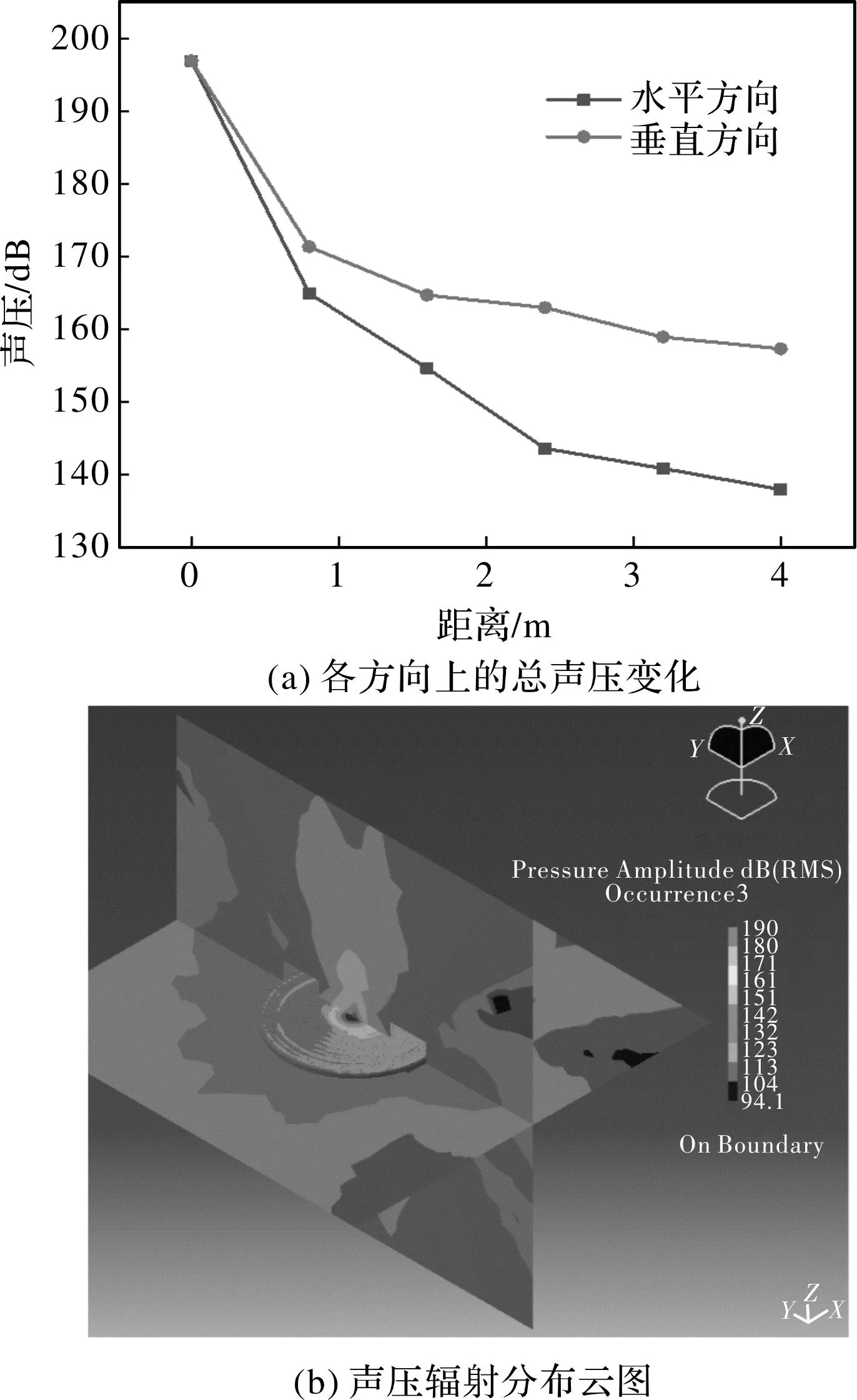
图4 偏航制动器总声压变化图
从图4(a)可以看出,竖直方向的总声压变化相对于水平方向的变化小,竖直方向整体的声压比水平方向的声压大,这是因为在摩擦制动过程中垂直方向上的振动相比水平方向上剧烈。
图4(b)表明制动器的中心位置的声压能量最集中且声压呈对称分布,最大声压为203 dB,辐射声压在垂直方向由制动器中心位置向四周辐射,水平方向声压成环状梯度分布并逐渐减小。因此需要加强垂直方向的声压降噪。
为了分析偏航制动器近场的声压在频率上的变化,选取制动器附近的一点(距制动器中心2 m处)进行频域分析。从图5近场声压分布来看,声压最大处在1 375 Hz和2 500 Hz附近,最大声压为168 dB,根据噪声的频率分类划分标准,该频率范围的噪音属于低频尖叫噪声,低频尖叫的发生是由于制动系统的动态失稳造成,与系统的模态耦合有关;频率在3 kHz以上时由于振动能量相比垂直方向的小,水平方向声压衰减速度较快;在3~5 kHz之间,声压存在多个高峰,这与复模态仿真中的不稳定模态的集中频率区间相同。

图5 各方向上频域的声压分布
4.2 偏航速度对偏航制动器声压的影响
图6为p=2 MPa、μ=0.4时,偏航摩擦片在不同偏航速度下的总声压变化曲线。由图6可知,随着偏航速度的增大,由于制动盘和摩擦片接触区域产生了更大的激励,使得不断变化的摩擦力将振动能量不断地馈入系统中,在相同工况下更容易产生振动,导致制动系统变形增大和辐射声压变大,严重的还会导致制动器的内部结构失去原有平衡而发生剧烈振动,加剧了偏航制动器的异响和制动器各子部件之间的摩擦,降低偏航制动器的使用寿命。在实际运行时,偏航制动速度的增加会在系统启动瞬间与偏航齿轮发生激烈的齿间冲击,造成结构失去平衡,加剧振动的产生。
图6 不同偏航速度下声场变化曲线
4.3 计算数据分析
4.3.1 直观分析
正交试验分析结果如表4、表5所示。对于最大辐射声压,极差R越大,表明该因素的水平变化对模拟结果影响越大,反之,R越小该因素影响越小。可由表5知,偏航速度对最大辐射声压的影响最大,偏航压力的影响次之,摩擦系数的影响最小。设偏航速度对最大声压的影响系数分别为1,偏航压力、偏航速度、摩擦系数对最大辐射声压的影响系数分别为0.19、1、0.03。

表4 不同工况下总声压的正交试验结果

表5 2 m辐射声压的极差分析
分析各工况不同水平平均值k可知,产生最大声压的偏航速度工况排序为:0.40 rad/s>0.30 rad/s>0.20 rad/s;根据各因素水平平均值选取最优水平组合,当偏航压力4 MPa、偏航速度0.2 rad/s、摩擦系数0.36,偏航制动系统的最高声压最小。
4.3.2 方差分析
正交方差分析结果,如表6所示。为了检验因素显著性,通过查询F(n因素,n误差)分布可知,F0.01(2,2)=99,F0.05(2,2)=19,F0.1(2,2)=9;将F值填入表6中,对不同工况下的声压进行分析。

表6 2 m处总声压的正交试验分析结果
按照方差分析方法分析正交模拟数据,F值越大,该因素对模拟结果的影响越大;对表6分析可得,偏航速度对偏航摩擦的声压影响最大,偏航压力的影响次之,摩擦系数的影响最小。判断某因素对于实验结果是否影响显著,通过对比F分布的临界值,查询F分布,即F0.01(n因素,n误差)=F0.01(2,2)=99,若某因素F值大于F0.01(n因素,n误差),说明有99%的把握判断该因素的水平对实验有显著影响,反之则影响不显著。从表6中可知,偏航速度的F值大于F0.01(2,2),因此,方差分析结果与直观分析结果一致,证实了试验数据分析的正确性。
5 结论
(1)结合偏航制动器实际尺寸、材料参数的特性,结合偏航制动器实际运行工况,利用声学有限元法模拟制动过程,得到了制动系统的声学辐射声压分布云图。
(2)偏航制动器最大声压为203 dB,辐射声压在垂直方向由制动器中心位置向四周辐射,水平方向声压成环状梯度分布并逐渐减小;垂直方向声压衰减缓慢,故加强偏航制动器垂直方向的降噪。
(3)2 m处的最大声压在1 375 Hz处,其值为168 dB,3~5 kHz的连续噪声与复模态结果相同;偏航制动器的噪声属于低频尖叫噪声,与偏航制动系统的动态失稳有关。
(4)偏航速度对摩擦片的辐射声压分布的影响最大,偏航压力的影响次之,摩擦系数的影响最小;偏航压力、偏航速度、摩擦系数对最大辐射声压的影响系数分别为0.19、1、0.03。