基于无人机倾斜摄影的实景三维模型构建策略
2024-01-05刘小丽邹安安黄会文
刘小丽,邹安安,黄会文,黄 欢
(江西信息应用职业技术学院,江西 南昌 330043)
1 无人机倾斜摄影技术概述
1.1 基本原理
无人机倾斜摄影就是将多个倾斜相机搭载到同一架无人机上,使其在同一个曝光点对同一个地物进行多角度倾斜摄像。就目前来看,国内的无人机倾斜摄影系统主要为倾斜摄像机五拼形式,就是将一个与地面垂直和四个具有一定倾斜角度的摄像机搭载到同一架无人机上,对同一目标地物进行五个角度的拍摄,实现目标地物影像的高分辨率获取[1]。
1.2 主要优势
就目前应用的无人机倾斜摄影技术来看,其主要优势包括以下几个方面:一是在进行倾斜影像的获取中,此项技术不仅具备足够高的机动性,且技术成本也比较低廉。二是在具体摄影中,只需要让无人机进行一次飞行摄影,获取到的倾斜影像便可充分满足后期的实际应用需求。三是通过此项技术的应用,可让传统正射影像仅能够进行垂直分析的这一缺陷得以有效弥补,同时获取目标地物的高程信息及其坐标信息,并构建起三维实景模型,从而对目标地物进行360°的全面分析。借助二次开发软件,也可以对具体的坡度、坡向等做出精准分析,并准确测量出房屋高度。四是根据倾斜摄影建立的三维实景模型具有最小的数据量,且能够为各种格式之间的快速转换提供支持,从而更加有利于三维实景模型后续的二次开发。
2 无人机倾斜摄影中的实景三维建模方案
对于采用无人机倾斜摄影技术获取的目标地物信息,在进行其实景三维建模的过程中,主要的建模方案如下:一是将获取的数据导入Context实景三维建模软件中,通过该软件进行相应的数据处理与三维实景模型构建。二是对于无人机倾斜摄影技术条件下的实景特征影像数据,主要利用SIFT特征匹配算法进行获取,将系统识别出的影响结果匹配到三维实景模型中,以便用于后续的三角测量数据提取。采用光束法处理业内数据,将方位元素控制点作为依据,对基础坐标数据进行获取,按影像POS姿态数据进行平差处理。经过平差处理之后,再进行数据的三维重建,在获取到无人机倾斜摄影图像之后,便可实现三维场景中各类位置信息的全面恢复,从而实现目标地物三维建模资料的全面记录[2]。三是通过无人机倾斜摄影获取的信息来判断已有的影像资料,完成三角网和目标影像信息的匹配,采用双线性内插法进行影像灰度值获取,再将图像处理结果作为依据,完成三维模型中的图像结构精细化处理,最终实现三维实景模型的自动生成。
3 无人机倾斜摄影中的实景三维建模策略
3.1 图像采集策略
在具体的三维实景模型构建中,目标地物的图像需要通过无人机倾斜摄影的方式来进行获取。在此过程中,为实现数据处理精度的良好保障,可按照式(1)对倾斜摄像获取的几何数据进行处理:
式中,D代表摄像过程中地物的最大水平距离值,其单位是m;h代表无人机飞行高度,其单位是m;a代表相机倾斜角度,其单位是°;b代表相机可视角度,其单位是°;d代表无人机和地物之间的最小距离,其单位是m。
3.2 图像预处理策略
在具体的倾斜摄影过程中,相机透镜很容易出现径向畸变,而借助平面扫描仪中的图像传感器,则可以使其形成特定形式的数据平面,再将图像的坐标方程作为依据,对其倾斜摄影中的畸变数据进行科学获取,并对其中存在的数据误差进行修正。在修正过程中,主要按照式(2)来进行数据处理:
经式(2)进行图像预处理之后,倾斜摄影数据更具完整性,可避免畸变参数对影像数据后续处理结果产生不良影响。
3.3 空中三角测量策略
可采用多张连续高度重叠形式的倾斜影像模型来进行空中三角测量。在此过程中,除了需要应用到倾斜摄影获取图像的POS数据,还需要添加一些和影像有关的其他POS数据。为确保数据精度,可采用自由网光束平差法以及匹配影像同名点等方式来进行匹配结果获取[3]。可将控制点的具体内容作为依据,反复对获取到的数据进行计算,使最终获得的数据和规定的精度标准相符,以此来实现数据资料的准确获取。
在通过无人机进行低空倾斜摄影的过程中,需通过搭载在无人机上的所有摄影设备,从多个角度对同一个目标地物进行拍摄。在这样的情况下,当进行空中三角测量连接点匹配时,由于受到角度影响,通常会产生大量的节点。对于这些节点,如果都进行解算,便会消耗大量的时间,不利于后续工作的及时、有序进行。基于此,在具体的三维实景建模研究中,可将局域网作为基础,对多机多节点实施并行处理,从而让数据处理具有更高的效率。
就目前的空中三角测量来看,其主要的数据处理策略包括以下几点:一是将倾斜摄像数量和摄像区域分布情况作为依据,按照多个小区域对一个大的三角测量区域进行划分,其中的每一个小区域都可以与多个节点进行连接匹配,以此来满足平差解算的最终目标,使处理之后的数据达到规范要求的精度。二是对质量检查点和业外控制点进行全面计算,再通过裸眼立体法在正确位置布设控制点,这样便可让计算出的数据结果具有更高精度。三是对于加工处理之后的数字区域网以及外业控制点,需进行二次计算,之后在相应的坐标系中定义与之对应的区域网数据,这样便可实现三维实景模型里各个关键坐标数据的科学确定。四是对各个子区域网中的数据实施合并处理,这样便可形成一个多角度、多点位连接形式的图像网络结构,使摄影图像具有更高的覆盖率,并显著降低其数据误差。通过这样的方式,不仅可实现倾斜摄影图像大局域网体系的全面形成,同时也可以进一步提升其数据精确度。五是对空中测量结果数据进行计算,使其方位元素得到合理确认,将最终的成果应用到三维实景建模中,这样便可进一步提高倾斜摄影数据的处理精度[4]。
3.4 纹理映射策略
在通过上述方式构建了倾斜摄影三维实景模型之后,为实现该模型中各种纹理映射结果的有效获取,还需要将参数化用作主要目标,构建起一个纹理映射曲面。在这个纹理映射曲面中,纹理映射方法就是对三维地物(x,y,z)表面点以及二维纹理(u,v)空间点之间的关系进行获取。通过这样的方式,便可建立起一个参数化形式的纹理映射曲面。以下是三维实景建模中的纹理映射公式:
式中,X、Y和Z分别代表三维地物表面点上的三维坐标值,即X轴坐标值、Y轴坐标值以及Z轴坐标值。在[0,1]这一范围内,可用多个参数和多种求值程序来对其纹理映射结果进行计算,并将具体的计算结果和实际的纹理空间作为依据,完成三维实景模型中的纹理映射结果加工。通过这样的方式,便可将目标地物的所有纹理都精准映射到所构建的三维实景模型中。
3.5 双线性插值策略
在具体的三维实景模型构建中,要想对这个实景模型进行插值处理,并保障整体的建模数据精度,就需要应用到双线性插值策略。该策略主要通过贝塞尔插值法来为三维实景模型进行插值。在具体插值中,需要在其x方向和y方向上进行贝塞尔插值处理,这样才可以获取到足够精确的插值结果,最终实现三维实景模型的精准构建。
在具体进行插值处理时,可先通过贝塞尔公式来完成线性插值,再通过中央差分格式对贝塞尔公式进行处理,以此来实现第二阶差分公式的获取,其公式为
3.6 仿真测试分析
为验证上述三维实景建模策略的应用效果,本次研究中,特对某无人机倾斜摄像基础条件下的三维实景建模进行测试。在具体测试中,选择的无人机是四旋翼大疆无人机,摄像机选用SONY-A7型相机。表1为本次测试中所选的无人机主要运行参数。

表1 本次测试中所选的无人机主要运行参数
在本次仿真测试中,共设置了五个检查点,对于每一个检查点位置的坐标信息,主要通过传统方法和上文介绍的SIFT算法进行获取,并对两种方法获取到的检查点坐标信息进行对比。表2为本次测试中通过两种方法获取检查点坐标信息的对比情况。
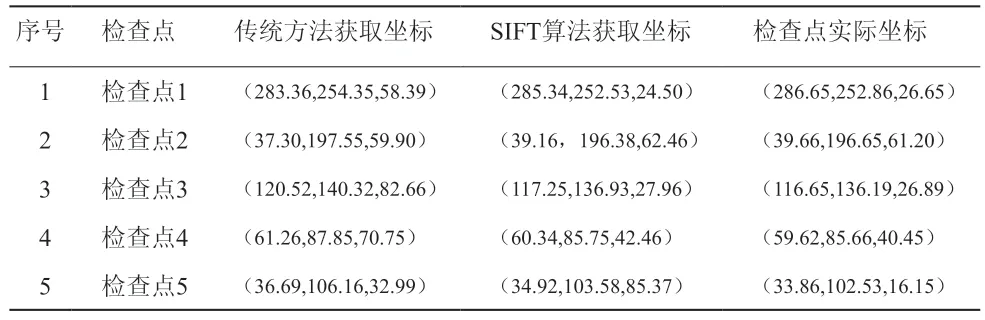
表2 本次测试中通过两种方法获取检查点坐标信息的对比情况
通过对以上数据对比分析可知,本次研究中应用的SIFT算法较传统方法获取到的检查点坐标数据更加准确。因此,在具体的三维实景建模中,通过用SIFT算法来替代传统方法进行数据获取,可进一步提升数据精度,从而更好地满足实际建模需求。在无人机倾斜摄像获取的影像数据中随机选出一幅,通过上述方法进行三维实景建模处理,将该三维实景模型和传统方法建立的三维实景模型进行对比,可发现,上述方法构建的三维实景模型较传统模型具有更高的清晰度。由此确定,本文提出的三维实景建模方法较传统方法更加优越,通过应用该方法,可以对无人机倾斜摄影获取的影像数据做出更加精确的处理,从而为相应的测量工作提供更好的支持。
4 结束语
综上所述,在无人机倾斜摄影测量工作中,三维实景模型的合理构建至关重要。基于此,研究者和技术人员应对其建模方法展开深入研究,通过数据采集、图像预处理、空中三角测量、纹理映射以及双线性插值等策略的合理应用来提升其数据精度,从而使构建的三维实景模型具有更高的分辨率,为相关测量和分析工作提供更多参考价值。