用于输煤廊道的智能巡检机器人自动化巡视系统
2024-01-05高亚磊赵松璞
高亚磊,侯 楠,赵松璞
(1.华电忻州广宇煤电有限公司,忻州 034000;2.深圳市朗驰欣创科技股份有限公司,深圳 518000)
目前,输煤廊道巡检工作存在巡视盲区和效率低下的问题,使用人工巡视方式容易发生巡视疏漏和严重事故[1]。此外,输煤廊道中的主要运行设备皮带机和托辊轴承的润滑不及时容易导致故障,进而引发快速升温和火灾风险。其中,皮带材料是橡胶,在高温情况下容易产生安全隐患。另外,输煤廊道容易受环境因素影响,如恶劣天气和地震,会影响输煤廊道的运行可靠性。夏季雨水过多时,输煤廊道容易出现洪涝灾害,威胁设备正常运行和工作人员安全[2]。这些问题给输煤廊道的安全运行带来严重威胁。
智能巡检机器人频繁应用于变电站、交通物流以及煤矿等众多场合中。为了提升输煤廊道的监管水平,避免输煤廊道出现安全事故,维持输煤廊道内输煤皮带等设备的安全可靠运行状态,设计智能巡检机器人自动化巡视系统,实现输煤廊道的日常监管。
1 智能巡检机器人自动化巡视系统
1.1 智能巡检机器人自动化巡视系统总体设计
智能巡检机器人自动化巡视系统主要包括轨道传动模块、机器人本体、通信模块、供电动力模块以及监控平台,如图1 所示。机器人本体搭载了高清摄像头、温度传感器和声音传感器等传感器,通过这些传感器采集输煤廊道的图像信息[3]、温度信息等环境数据。采集到的数据通过通信模块传送至监控平台,为输煤廊道管理人员提供实时环境数据,实现输煤廊道的实时监控。

图1 系统总体结构图Fig.1 Overall structure of system
1.2 智能巡检机器人
智能巡检机器人自动化巡视系统中,智能巡检机器人的结构如图2 所示。可以看出,智能巡检机器人包括车厢、静音底盘、同步带、动力总成等部分。智能巡检机器人设置了同步带和同步轮的天然橡胶轮胎,保障机器人巡检时不发出噪声。智能巡检机器人内设置金属定位片以及定位芯片,为系统的监控平台提供实时位置[4]。巡检机器人中搭载了温湿度传感器、可燃气体传感器、一氧化碳传感器等多个传感器,为监控平台提供全面的环境信息。

图2 巡检机器人结构图Fig.2 Structure diagram of inspection robot
智能巡检机器人中搭载的输煤廊道巡检的传感器如图3 所示。

图3 巡检机器人搭载传感器Fig.3 Inspection robot is equipped with sensors
智能巡检机器人在巡视系统中,主要包括如下功能:
(1)定位导航。智能巡检机器人搭载了定位芯片。在输煤廊道中预先吊装轨道,利用二维码在巡检机器人上设置特征标识点,在机器人沿轨道行走以及定点运行时,可以实现精准定位。采用轨道导航定位技术,不受环境等因素影响,适用于复杂环境的输煤廊道中。
(2)图像分析。图像分析技术是输煤廊道巡检的重要部分。将具有较高清晰度的高清可见光摄像头,搭载于智能巡检机器人中。利用高清的可见光摄像头,采集输煤廊道图像[5]。利用图像识别、目标检测等图像识别技术,识别输煤廊道中设备运行状态。由于输煤廊道中包含众多不同类型设备,设备型号繁多,需要高识别性能的识别算法,保障巡检目标识别的高效性。采用深度学习算法等人工智能技术,实现输煤廊道内设备的快速精准识别。
巡检机器人可以依据预先设定的巡检任务,自动规划巡检路径,完成巡检任务[6]。巡检机器人设置了360°全方位的云台摄像头。巡检机器人具备自动化报警功能,可将故障信息及时上报至监控平台。机器人设置了防碰撞接触装置,巡检机器人与人或障碍物距离过小时,及时发出报警,避免机器人与障碍物出现碰撞。
1.3 系统轨道传动模块设计
设计智能巡检机器人自动化巡视系统的轨道传动模块时,需要充分考虑输煤廊道的特殊环境信息,依据输煤廊道内设备布置方式、设备架构、廊道环境和廊道走势,设计便于机器人巡检的轨道系统。采用高强度铝合金材料作为传动模块的轨道型材料。轨道安装时,可以采用拼接方式。依据输煤廊道地形设计轨道坡度和轨道的弯曲度。轨道传动模块采用的材料需要具有较高的抗磨损性能和抗腐蚀性能。轨道传动模块设置钢质防火门,利用配套的电控模块控制防火门启闭。轨道传动模块的防火门为常闭状态。机器人穿越时,向电动模块发送信号,电动模块控制防火门自动化开启,直至机器人完成防火门穿越后,电动模块控制防火门自动化关闭。
1.4 系统通信模块
智能巡检机器人自动化巡视系统中的通信模块起着关键的作用。该模块可将机器人采集的信息传送至监控平台,并实现与输煤廊道中的其他设备的实时通信。为确保通信的可靠性,系统在输煤廊道中设置了多个通信基站,构建无线局域网,以提升通信网络的负载平衡和带宽。通过高效的通信性能,机器人与监控平台之间可以实现可靠的数据传输,保障巡视任务的顺利进行。这一通信模块的结构如图4 所示。

图4 通信模块结构图Fig.4 Structure diagram of communication module
1.5 智能巡检机器人自动化巡视系统软件设计
智能巡检机器人自动化巡视系统软件设计时,需要考虑系统机器人本体嵌入微控制器的控制软件设计,以及监控平台的远程数据显示与操控软件设计。机器人本体的微控制器,利用软件设计控制机器人自主往返巡检,对巡检过程中存在的异常位置进行定位与复检。机器人利用搭载的传感器和摄像头采集的数据,需要同时传送至数据存储模块,利用通信模块通过构建的通信网络传送至输煤廊道管理人员的远程监控平台,实现输煤廊道的实时监测。选取Visual Basic/Visual C++的集成开发软件,开发系统的控制软件以及远程数据显示软件,实现系统机器人本体与监控平台的数据、图像传输,以及数据、图像的显示与存储。系统监控平台的软件设计主要包括以下内容:
(1)图像显示模块。利用图像显示模块的软件设计,实时显示机器人搭载的摄像头采集的输煤廊道现场图像;
(2)皮带问题分析显示模块。利用皮带问题分析显示模块,显示机器人巡检输煤廊道的环境信息以及皮带信息;
(3)机器人运动控制模块。通过机器人运动控制软件设计,实现机器人运动模式的选择,设置自主定位复检等巡检功能;
(4)机器人状态模块。利用机器人状态模块实时显示机器人的运行速度与位置信息,控制机器人运行速度;
(5)视频分析模块。利用视频分析模块,显示输煤廊道的实际运行状态,检测电子围栏、输煤皮带人员是否存在翻越情况,以及是否存在未佩戴安全帽的人员。
机器人软件设计包括本体嵌入软件和远程控制软件,诊断、控制巡检机器人,实现上位机通信功能。系统上位机设计的机器人巡检程序流程如图5所示。利用机器人本体嵌入式控制软件,控制与诊断机器人运行状态,实现上位机的通信。本体嵌入式控制软件,初始化系统的底层配置,完成底层配置初始化后,对应用层进行初始化,包括传感器数据采集以及上位机通讯等数据的初始化。利用循环程序执行处理函数、命令执行函数以及通讯处理函数。
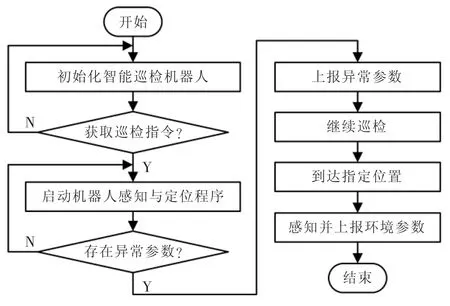
图5 上位机巡检程序流程Fig.5 Flow chart of PC inspection program
2 实例分析
选取某集团发电有限公司的输煤廊道作为系统测试对象。针对该电厂输煤廊道设计的智能巡检机器人自动化巡视系统,主要设备设置情况如表1所示。

表1 智能巡检机器人自动化巡视系统主要设备Tab.1 Main equipment of patrol system of intelligent inspection robot
依据表1 的设备设置情况,构建智能巡检机器人自动化巡视系统。
智能巡检机器人自动化巡视系统中,巡检机器人的现场图如图6 所示。可以看出,智能巡检机器人自动化巡视系统设置的智能巡检机器人,成功搭载在输煤廊道中。智能巡检机器人利用搭载的摄像头,采集输煤廊道的图像信息以及环境信息,为输煤廊道的智能巡检提供良好的基础。

图6 输煤廊道巡检机器人现场Fig.6 Field picture of inspection robot in coal transport corridor
智能巡检机器人自动化巡视系统中,巡检机器人的参数设置如表2 所示。

表2 巡检机器人参数设置Tab.2 Parameter settings of inspection robot
智能巡检机器人自动化巡视系统对输煤廊道进行巡检,系统环境温度监测的运行界面如图7 所示。从图7 系统测试结果可以看出,所设计系统利用软件设计程序,可以实现系统的可靠运行。系统运行界面图中,有效显示了输煤廊道的环境温度信息,实现输煤廊道环境温度的实时监测。输煤廊道管理人员,可以依据系统运行的界面图,分析输煤廊道的环境温度运行状态。

图7 系统运行界面Fig.7 System operation interface
智能巡检机器人自动化巡视系统的监控平台,依据机器人平台上传的数据,判断输煤廊道状态。分析机器人采集的声音数据,判断输煤廊道设备是否存在异响,判断输煤廊道设备存在异响时及时报警。传感器上传的输煤廊道设备声音频谱信号如图8 所示。

图8 输煤廊道设备声音频谱信号分析Fig.8 Sound spectrum signal analysis of coal corridor equipment
分析图8 的输煤廊道设备声音频谱信号,输煤廊道设备出现故障时,设备的声音频谱信号将出现异常。图8(a)中的输煤廊道设备声音频谱信号具有较高的规律性,表明输煤廊道设备为正常运行状态;图8(b)中的输煤廊道设备声音频谱信号呈现规律的异常声音信号,信号存在谐波情况。图8 实验结果验证,系统可以利用所采集的输煤廊道设备的声音频谱信号,分析输煤廊道设备是否存在异常。
3 结语
针对输煤廊道设计智能巡检机器人自动化巡视系统时,需要充分考虑输煤廊道的实际应用环境。设计的智能巡检机器人自动化巡视系统需要具备实时巡检功能,同时具备振动测试功能等众多功能。利用机器人巡检方式,代替人工巡检方式,充分发挥机器人的巡视功能,提升输煤廊道的巡检效率,为燃煤电厂中煤炭的正常输送提供可靠保障。所设计的智能巡检机器人自动化巡视系统有效降低输煤廊道的人工作业成本,响应智能电站的建设要求。
