温度自适应PID 整定方法在伺服系统中的应用
2024-01-05姚少灿张海娜李志林
姚少灿,张海娜,李志林,王 建
(天津航天中为数据系统科技有限公司 天津市智能遥感数据处理技术企业重点实验室,天津 300301)
随着人工智能信息化大数据的发展,森林火情监测、高速公路车况巡检、矿区安全防护等领域的监测巡检作业任务,逐渐趋于无人化远程作业。如旋翼无人机无人机自动机场、复合翼无人机无人机自动机场等,可远程操控无人机进行多架次、多航迹巡检作业任务,可远程操控无人机场对无人机进行自主回收、赋能等功能,可布局在地理环境较复杂的区域,克服人员现场巡检作业困难的问题,具有巡检作业灵活、巡检范围广、巡检作业效率高等优点。
无人机自动机场被布设的地理位置不同,工作环境也各不相同,在温度环境较低的区域,负载特性会发生变化[1-2],导致无人机自动机场中的伺服系统出现启动异常问题。无人机自动机场采用直流无刷伺服系统,直流无刷电机的启动控制常见的方法有:第1 类为定位、加速、稳态三段式启动方法,低温负载状态变化时,不能自适应改变预设的启动性能,电机启动易堵转,可靠性较低[3];第2 类为预定位启动方法,此方法在定位过程中会产生反转,一般用于负载较轻的工况,而无人机自动机场的伺服系统属于负载较重的工况,此方法也不适用[4];第三类为升频升压的启动方法,此方法需要设计额外的启动电路,既增加了系统的设计成本,又增大了控制的复杂性[5]。为解决此问题,本文采在三段式启动控制的基础上,融合温度自适应PID 整定控制策略,随温度的变化自适应调节伺服系统的启动性能,在无人机自动机场平台上进行了伺服系统温度自适应启动控制策略的设计与实现。
1 伺服系统启动原理分析
1.1 伺服系统机械传动特性分析
伺服系统由电源、伺服电机、驱动器、机械传动机构、负载等部分组成。从系统功率转换的角度来看,伺服系统传动的本质是通过电能量的输入,经机械结构的运动传输,最终转化为对机械能输出控制。则系统的传动效率方程[6]为
式中:η 为机械传动效率;Pin为电机端输入功率;Pout为负载端输出功率;Tout为减速机端的输出扭矩;δ为减速机的减速比;ηteeth为减速机的齿轮啮合效率;TNoload为减速机的空载运行扭矩。
机械传动结构中,减速机的空载运行扭矩TNoload受内部填充润滑脂的粘性阻力影响较大[7]。当环境温度较低时,润滑脂的粘性阻力较大时,TNoload较大,机械传动效率变小,则Tout就会较小;当环境温度较高时,润滑脂的粘性阻力较小时,TNoload也随之减小,机械传动效率变大,则Tout就会增大。为保证负载端输出扭矩的稳定平衡,需要调节输入端的扭矩,以弥补传动效率的损失。
1.2 直流无刷电机数学模型及运行特性分析
无人机自动机场系统选用伺服电机为Y 型联结直流无刷电机,其功率拓扑结构采用三相桥式全控逆变电路[8]。则直流无刷电机电压平衡[9]方程可简化为
式中:Ud为直流母线电压;ΔU 为功率开关电路导通压降;E 为电机反电动势;Iav为电枢平均电流;Rav为电枢绕组平均电阻;Ke为反电动势系数;n 为电机转动速度。
则电机稳态运行时电枢平均电流为
直流无刷电机的电磁转矩[10]方程为
式中:Te为电机的电磁转矩;ia、ib、ic为三相绕组的相电流;ea、eb、ec为三相绕组的反电动势;ωr为电机转子的机械角速度;KT为电机电磁转矩系数。
则由式(3)与式(4)可推导电机的机械特性方程为
电机刚开始启动时,电机的电磁转矩小于电机的负载转矩,电机转速为0,反电动势为0,则可推导电机的启动特性方程为
式中:Ist为电机的启动电流;Tst为电机的启动转矩。
电机启动瞬间,启动电流快速爬升,启动力矩快速增加,当Tst>TL后,电机开始转动,转速逐渐增加,电机反电势增大,电枢电流及电磁转矩逐渐下降,直到电机运行到额定转速时,电机进入稳定运行状态。传统的启动方式在特定的温度环境下将电机启动的位置、速度、电流等环路的PID 参数已预先设定完成,当负载变化时,预先设定的PID参数与实际应用不太匹配,转子运动时过于滞后绕组旋转磁场的位置变化,导致电机启动特性下降、启动失败的问题。
2 温度自适应PID 整定控制系统设计
2.1 温度自适应PID 整定控制器设计
本文在传统的PID 调节控制器[11]的基础上,设计一种基于温度自适应的PID 参数整定控制器。温度自适应PID 控制器原理如图1 所示。

图1 温度自适应PID 控制器原理框图Fig.1 Block diagram of temperature adaptive PID controller
图1 中,r(t)为设定值;KT(t)为温度变量调节系数;u(t)为输出量;y(t)为反馈量。则温度自适应PID控制器的离散表达式如式(7)所示:
式中:Kp(t)=KpKT(t)为比例增益量;Ki(t)=KiKT(t)为积分增益量;Kd(t)=KdKT(t)为微分增益量。
当负载力矩随温度发生变化时,温度自适应PID控制器可根据温度的变化对伺服系统的比例增益、积分增益、微分增益等参数进行自动整定,以实现伺服电机在不同的环境温度下都能稳定可靠的启动运行。
2.2 温度自适应伺服启动控制硬件系统设计
为验证温度自适应PID 整定控制策略的可行性,构建温度自适应伺服启动控制硬件系统,如图2所示。

图2 温度自适应伺服启动控制系统硬件框图Fig.2 Hardware block diagram of temperature adaptive servo start control system
温度自适应伺服启动控制系统主要由4 部分组成。第1 部分为数据采集模块,主要由编码器、温度传感器、电流采样电路3 部分组成,用于采集电机的当前位置数据及环境温度数据及电机的绕组电流;第2 部分为MCU 模块,结合环境温度数据、电机的位置、电流数据与各控制器环路的PID 调节参数进行融合,实现基于温度自适应的位置、速度、电流三控制器参数的PID 控制算法运算;第3 部分为伺服驱动模块,通过对IGBT 功率驱动电路,实现电机绕组的励磁电流控制,从而驱动电机进行旋转运动;第4 部分为动力执行模块,电机的输出扭矩,经减速机的倍频放大,作用到负载端,驱使负载进行运动。
MCU 选用GD32F407 芯片,基于RAM Cortex-M4内核的32 位通用微处理器,具有UART、SPI、ADC、DAC、I2C、CAN 等丰富的外设资源,可进行环境温度、电机位置、电机电流等数据采样处理,相比进口芯片,具有成本低、性价比高的优点。温度采集模块选用DS18B20 数字温度传感器,测量范围-55℃~+120℃,相比模拟温度传感器具有硬件简单、抗干扰能力强等特点。
2.3 温度自适应伺服启动控制软件流程设计
温度自适应启动控制软件设计流程如图3 所示。伺服系统上电后,接收到系统的启动控制指令后,通过数据采集模块,对环境温度数据进行采样,为防止硬件系统中的噪声干扰,导致温度条件的误判,对采集的温度数据进行滤波处理,确保温度变化的平滑性与稳定性;对电机的位置数据进行实时采样,一方面作为位置环路的反馈量输入,另一方面将位置数据处理为速度量作为速度环路的反馈输入;对电机绕组电流进行实时采样,经滤波处理后,作为电流环路的反馈输入。

图3 温度自适应启动控制软件流程Fig.3 Flow chart of temperature adaptive start-up control software
无人机自动机场为工业级应用产品,适用温度范围-25℃~+40℃,工作环境温度划分为3 个区间(-25℃≦T<-10℃;-10℃≦T<+10℃;+10℃≦T≦+40℃),当系统接收到启动指令后,根据系统辨识的温度区间,对伺服系统中的位置PID 控制器、速度PID 控制器、电流PID 控制器的PID 控制参数进行自动整定,结合系统采集的位置、速度、电流等反馈量,经各环路PID 控制器的运算,最终进行功率电路的开关逻辑控制,实现电机从启动阶段到平稳运行阶段的电磁转矩控制。
3 试验结果分析
为验证温度自适应PID 整定控制策略的有效性,基于无人机自动机场平台,分别在恒常温(30℃)、恒低温(-25℃)、可变温度(-25℃~40℃)3 种条件下,进行伺服系统启动试验对比测试。在试验过程中,对伺服电机的转矩电流、转速等变量数据进行采样与记录。
恒常温条件下,伺服系统预设定3 组恒定的PID控制参数(KPID1>KPID2>KPID3),试验过程中记录电机的启动转矩电流、转速数据如图4 和图5 所示。PID整定参数较大时,系统的位置、速度、电流环路的PID 调节跟随较快,启动时间较短,启动的峰值电流大,能快速进入到转矩平稳阶段,系统的动态响应性能较好;PID 整定参数较小时,系统各环路调节作用较慢,启动时间较长,转速上升过慢,系统的动态响应性较差。
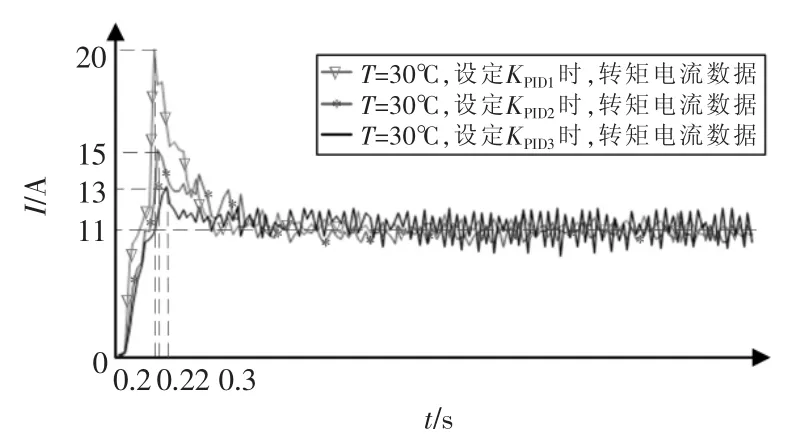
图4 恒常温时电机启动转矩电流图Fig.4 Motor starting torque current diagram at constant normal temperature

图5 恒常温下电机启动转速图Fig.5 Motor starting speed diagram at constant normal temperature
恒低温条件下,伺服系统预设定3 组与常温时相同的PID 控制参数(KPID1>KPID2>KPID3),记录的电机启动转矩电流、转速数据如图6 和图7 所示。低温状态下负载力矩较大,PID 整定参数较大时(如KPID1、KPID2),环路调节控制量过大,绕组磁场变化过快,转子位置过于滞后绕组磁场变化位置,启动电流过大,触发系统过流保护条件,电流、转速瞬间降至0,导致系统启动失败;PID 整定参数较小时,虽启动时间较长,但各环路的反馈量能很好地跟随输入控制量的变化,最终达到稳定运行的状态。通过恒常温与恒低温的对比可知,恒常温时系统预设定的PID 启动控制参数(KPID1、KPID2),在恒低温时不适配,导致系统启动异常。

图6 恒低温时电机启动转矩电流图Fig.6 Motor starting torque current diagram at constant low temperature
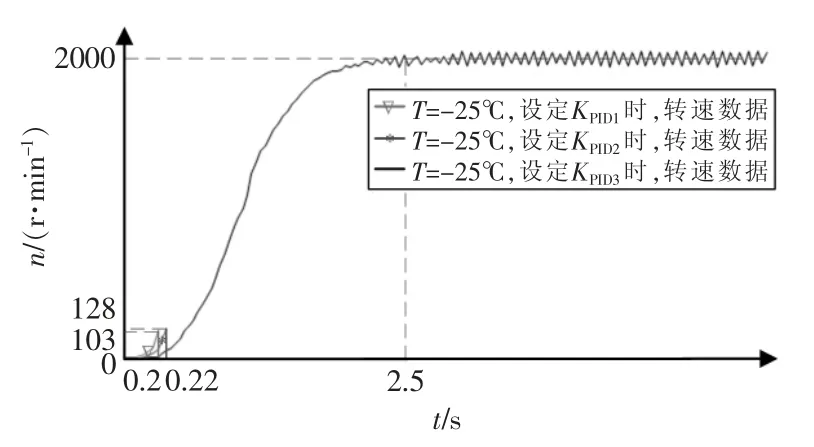
图7 恒低温时电机启动转速图Fig.7 Motor starting speed diagram at constant low temperature
可变温度条件下,采用温度自适应PID 整定控制策略,根据温度的变化区间,系统自动整定3 组不同的PID 控制参数(KPID1>KPID2>KPID3),记录的电机启动转矩电流、转速数据如图8 和图9 所示。当+10℃≦T≦+40℃时,系统自动整定启动参数为KPID1,启动时间0.5 s,保证了系统在常温下动态响应的快速性能;当-10℃≦T<+10℃时,系统自动整定启动参数为KPID2,当-25℃≦T<-10℃时,系统自动整定启动参数为KPID3,增大电机低温启动运行时的扭矩输出,保证系统在低温条件下稳定的工作性能。

图8 可变温度时电机启动转矩电流图Fig.8 Motor starting torque current diagram at variable temperature

图9 可变温度时电机启动转速图Fig.9 Motor starting speed diagram at variable temperature
4 结语
本文结合伺服系统的机械传动特性,直流无刷电机的启动特性、运行特性,对伺服系统低温启动异常的问题进行了分析,基于无人机自动机场平台,进行温度自适应PID 整定控制策略设计与验证。试验结果表明,基于温度自适应的PID 整定控制策略,可有效解决因温度变化,系统负载力矩突变,导致伺服系统预设启动参数不适配而启动异常问题。该控制策略既能兼顾常温条件下伺服系统动态响应的快速性,又能保证低温条件下系统稳定运行的可靠性,具有重要的工程应用价值。
