船舶机械减隔振技术与计算方法研究综述
2024-01-05唐怀诚杨旖旎邹明松
唐怀诚, 杨旖旎, 刘 烨,2,3, 邹明松,2,3
(1. 中国船舶科学研究中心, 江苏 无锡 214082;2. 深海技术科学太湖实验室, 江苏 无锡 214082;3. 深海载人装备国家重点实验室, 江苏 无锡 214082)
0 引 言
机械噪声是机械设备(如主机、桨轴、水泵等)激励振动所产生的噪声,是船舶中低速航行和潜航时的主要噪声来源[1].增强船舶机械减隔振系统的减振降噪性能对船舶的安全性和隐身性能都具有很重要的作用.
减隔振的主要方法有消振、吸振和隔振等.消振是依靠选用低噪声设备来实现的,主要涉及到低噪声设备的选用规定,本文不进行详细评述.吸振和隔振的方法在船舶机械减隔振系统中大量应用:隔振是在振源和受控对象之间加上子系统,达到阻碍振动传递,最终减小受控对象振动的目的,图1是在机械隔振系统中应用最广的浮筏隔振系统;吸振是在受控对象上附加一个弹性子系统,以振动的形式抵消振源的振动,达到减少振源振动的目的,动力吸振器的作用机理如图2所示.
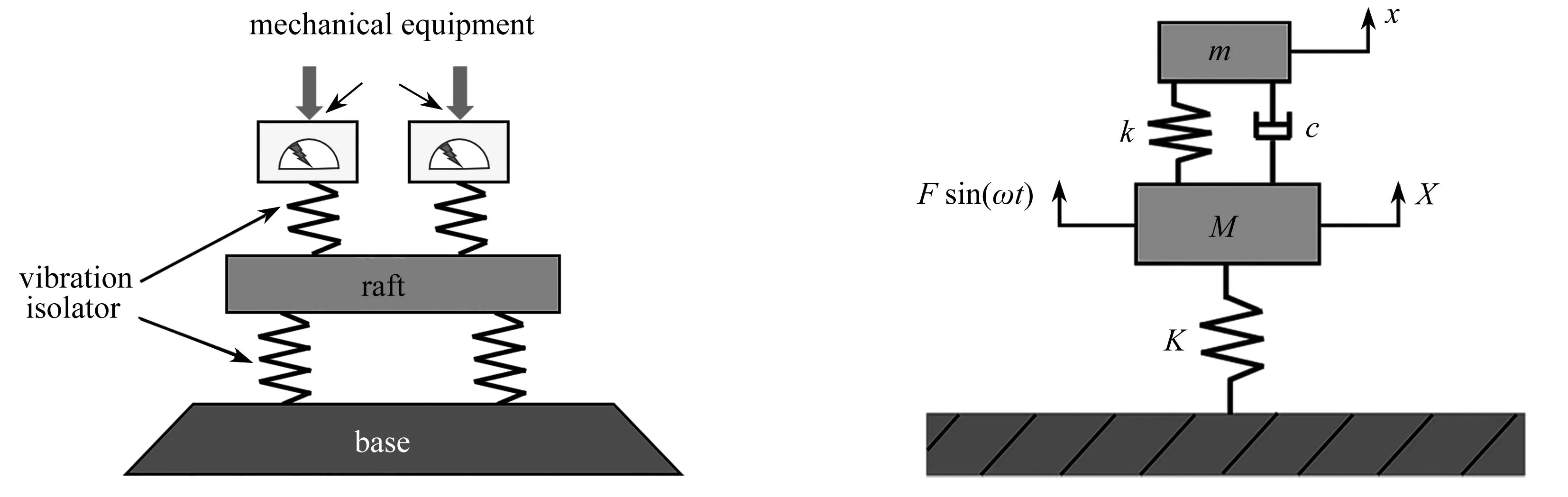
图1 浮筏隔振系统
为有效减少船舶机械设备噪声的传递,学者们提出了安置隔振元件阻碍振动传递的被动隔振、引入次级振源干扰抵消主振源的主动隔振[2].此外,吸振技术也广泛应用于船舶机械系统的减振降噪:被动型动力吸振器被用于抑制窄带振动[3],主动型动力吸振器可以进一步解决低频振动和宽带振动的控制问题[4].近年来,为了进一步阻碍机械噪声的传递,新型材料和智能材料被广泛应用于船舶机械系统减隔振.同时,学者们探讨新型结构形式以提升隔振系统阻碍振动传递的能力.
此外,隔振系统可以分为线性隔振系统和非线性隔振系统.其中线性隔振系统指质量保持不变, 力与位移参数成正比的隔振系统; 其余的隔振系统都是非线性隔振系统, 非线性隔振又包括阻尼非线性和刚度非线性等[5].
在实际的工程应用中, 常常将多种减隔振方法交叉使用于船舶机械系统的设计中, 以达到更好的减隔振效果.因而, 近年来学者们开始研究不同减隔振交叉使用的耦合影响: 如在考虑主动隔振和被动隔振耦合效应的前提下, 对浮筏隔振系统进行设计[6]的同时考虑将非线性能量汇于隔振系统耦合形成集成的减隔振系统[7].
1 隔 振 技 术
1.1 被动隔振
被动隔振可以分为单层隔振、双层隔振和浮筏隔振.它们可以看作是在振源和控制体之间布置的弹性元件,依靠机械隔振系统自身的质量、刚度、阻尼等减小乃至消除振动从机械设备、管路向船体的传递.这样做的优点是不消耗额外能量,不用安装主动控制回路,易于安装.
其中,单层隔振是最早应用于机器和基座之间的隔振方式,它的优点是安装简单,但在低频段想要理想的隔振效果需要让单层隔振器的刚度很小,承受静载能力很差,中高频段由于隔振器内部会产生驻波效应,隔振效果只在10~20 dB之间[8].双层隔振的减振降噪效果要优于单层隔振,它的原理是在机器和基座之间再加入一个中间基座,其隔振效果在中低频段可达35 dB以上,在高频段可达50 dB以上[8].浮筏和双层隔振的隔振原理相同,但双层隔振只考虑单台设备的隔振,浮筏同时连接了多个设备,通常情况下传统的浮筏隔振系统在中低频段隔振效果可达到40 dB以上[9].由于浮筏的减隔振效果较出色,近年来学者们对浮筏隔振进行了大量研究,下文中对隔振方法的评述也主要是针对浮筏隔振的相关研究和设计.
近年来,由于受传统线性隔振器的有效隔振频率的限制,导致传统的机械被动隔振系统在低频段的效果并不好,甚至在被动隔振系统的共振频段内反而会放大振动的传递.为应对船舶机械系统振动模态丰富、低频激励多的工程实际问题,学者们提出了采用浮筏隔振系统新型材料或新型结构形式的方法来增加机械系统被动隔振的适用频带和隔振性[10].
1.1.1 新型材料
将新型材料应用到船舶机械系统减振降噪领域可以有效降低船舶机械减隔振系统的体积质量,同时能提升其减振降噪的效果.李永胜等[11]探讨了对船用水泵的筏体结构采用复合材料(玻璃纤维增强树脂基复合材料)并进行了结构优化,设计出的复合材料浮筏在中低频段(10~500 Hz)的隔振效果提高了3 dB,重量降低了18%.靳帅楠等[12]发现铺设聚氨酯材料以降低船首声纳平台的机械噪声,隔振效果可提高8 dB.
Teng等[13]提出在隔振器中填充固液混合液材料:由于隔振性能与固体单元数相关,可以有效提升隔振器设计时隔振性能的精准度,他们用精确积分的方法计算了几个激励频率值的响应,发现使用120个固体单元的混合隔振器在20 Hz频段减振效果达到15 dB,同时使维修更便捷.刘兴天等[14]将负刚度梁与隔振器并联使用,在保持隔振器的承载性能和空间大小不变的情况下,提升了隔振系统的低频隔振性能.Hao和Cao[15]提出了一种具有较高承载能力和动态刚度的单自由度零刚度振子,并给出谐波强迫和谐波振动基作用下的传振率估计公式.Li等[16]建立了浮筏隔振系统的高维数学模型,并使用带有准零刚度的浮筏隔振系统,探究了不同浮筏的物理参数对船舶机械系统减振降噪的影响大小.
新型材料隔振不仅需要新型材料的创造,也需要针对舰船的具体适用场景对新型材料进行力学优化.对新型材料结构的优化研究,仍然是减振降噪的未来方向.
1.1.2 新型结构形式
船舶机械减隔振系统新的结构形式需要同时考虑耐压和隔振双重性能,学者们对声传递路径进行了深入研究,并由此设计出船舶机械减隔振系统的结构.张华良等[17]探究发现浮筏的隔振性能受基座质量、刚度和阻尼这些参数的影响很大,并据此给出了浮筏优化设计的一般准则.被动隔振的结构优化思想也正是在保证安装便捷性和结构静态承载能力的基础上,探究隔振系统质量、刚度和阻尼的最优数值以提升其阻碍振动传递的性能.
浮筏是船舶机械系统被动控制中应用最广泛的隔振方式,学者们对筏架的结构形式进行了大量研究.Machens等[18]研究了桁架结构浮筏对船舶机械设备到船壳之间振动传递的阻碍机理,发现桁架浮筏上的组装接头可有效减小机械设备向壳体传递的振动.张峰等[19]提出了可将动力吸振器置于浮筏桁架结构中,增加了桁架衰减船舶机械设备到船壳之间振动传递的性能.徐时吟[20]考虑了船舶附连设备与筏架的耦合,针对考虑附连设备的舱筏系统建立了整体频响矩阵,并基于周期结构的带隙分布,给出了基于手性结构的筏架设计过程.学者们根据不断发展的建模计算思想,研究的结构模型越来越细致、复杂,以求计算结果与工程实际情况更加符合.
此外,声学黑洞结构是近两年船舶机械系统减振降噪领域新兴的技术.作为一种新型的结构形式,声学黑洞结构的作用机理最先是由Mironov[21]发现的,他假设一个弯曲波在理想的锥型楔形(厚度在楔形顶端完全消失)中传播,发现波永远不会到达楔形顶端,这样就可以把弯曲波困在楔形体内部,振动能量在尖端聚集.我们如果在声学黑洞结构中的尖端布置少量的阻尼材料消除捕获到的噪声,就可以很好地阻碍振动从机械设备向船壳的传递[22].基于此,Krylov[23]将声学黑洞结构推广到二维,并给出了薄板镶嵌声学黑洞的结构形式,最后讨论了声学黑洞结构在工程方面的实际应用可能.赵楠等[24]研究了浮筏上“声学黑洞”的结构阻碍振动传递原理,探讨了将传统声学黑洞改进为“分布式”声学黑洞以进一步提升机械减隔振系统的减振降噪效果,还将应用“分布式”声学黑洞与普通浮筏同受某设备实测激励载荷的作用,在10~200 Hz频域范围内机械噪声总级下降2.2 dB.现如今研究的声学黑洞结构往往在中高频处有更好的效果,对于提升它在低频段的减振降噪效果的研究在未来具有重大价值,能让这种新兴的被动隔振方法更好地应用在实际工程中.
非线性隔振器包括变阻尼隔振器和变刚度隔振器.Yang等[25]设计了一种磁流变液阻尼非线性隔振器,磁流变液阻尼非线性隔振器是依靠磁场作用改变黏性,从而达到变阻尼的效果;Williams等[26]设计的记忆形状合金刚度非线性隔振器,其刚度随温度非线性变化,以达到自适应控制的效果.与常规的“智能式”、自适应式控制器不同,非线性隔振器在同样可以针对不同频段振动达到最佳隔振效果的同时,不需要单独另加能量源和控制回路,在安装空间较小的水下船舶里可以得到广泛应用.黎崛珉等[27]通过求解FPK方程来研究随机激励下非线性隔振系统的隔振性能,并辅以数值方法验证,结果表明,随噪声强度增加,非线性阻尼抑制振动的能力更强.
准零刚度隔振器也是一种广泛研究的变刚度隔振器.力与变形的恒定比值定义为静态刚度,系统在静力平衡位置处产生微小振动时力与变形的比值定义为动刚度.线性隔振器的静刚度与动刚度相同,而准零刚度隔振器在保有同等静刚度的同时,在平衡位置的动刚度很小,因而固有频率也趋于零,从而在不减小静态承载能力的基础上获得了很好的低频隔振能力[5].Schenk等[28]考虑如何实现张拉结构的零刚度模态.Carrella等[29]对一个安装负刚度元件后由三弹簧组成的简单系统进行研究,发现了几何形状与相对刚度的关系,并给出了量化的表达式.准零刚度隔振器在不减小承载能力的同时大幅增加了在低频段的隔振性能,在减振降噪领域具有广泛的使用前景.王心龙、周加喜等[30]建立了一个分段非线性的准零刚度隔振系统的动力学模型,并用平均法研究表明在激励幅值较小时,其具有与传统准零刚度隔振系统同样优秀的隔振性能,而当激励幅值增大后,其隔振性能又能与线性隔振系统相当.
1.2 主动隔振
主动控制是船舶机械系统隔振的一种重要方法,在减小低频噪声方面具有重大意义.它的原理是根据接收到的被控系统的干扰和响应信号,通过作动器输出与干扰源相反的振动并互相抵消.因而主动隔振可以不满足于黏弹性理论,与被动隔振同时应用于船舶机械系统的隔振在理论上是可行的.在具体应用中,主动控制由于有控制回路和需要独立输出振源,因而不便于安装.为进一步增加主动控制系统隔振的作用范围和安装便捷性,学者们主要针对主动控制作动器和控制方法两方面进行了研究.
1.2.1 隔振作动器
传感器和作动器都是船舶机械系统主动控制的重要元件,分别负责传递控制信号和根据传递信号施加作动力抵消机械设备传递的振动,学者们对主动控制作动器进行了大量研究.主动控制作动器的类型有气动式、液压式、电磁式和智能式(如压电材料作动器、磁致伸缩材料作动器、电流变液和磁流变液作动器).
应用于船舶主动控制中的传统作动器类型主要是电磁式作动器,电磁作动器的原理是一永久磁铁围绕着固定内线圈,对线圈施加电压产生铁芯的轴向运动从而产生作动力.电磁作动器根据作用机理和线圈缠绕方式可分为多个类别,如表1所示[31].日本学者在主动隔振系统中采用了液压式作动器也取得了良好的隔振效果[32].液压作动器由液压缸-伺服阀组成,它能够在有限空间提供足够的抵消振动的位移或力,缺点是液压系统容易成为新的噪声源[33].气动作动器可以看作工作介质是空气的液压作动器,其优点是能提供较大的作动力、污染小等,缺点是作用频带较窄[34].近年来,智能式作动器的发展十分迅速,这是由于采用智能材料制作传感器、作动器的主动控制系统反应灵敏、准确度高.例如常用的压电智能作动器[35], 它的应变来自于电场作用下由微观粒子引起的晶体结构的不对称, 具有迟滞效应小、 能量可循环的特点.而对于磁致伸缩作动器, 由于采用了新型合金, 其具有很强的应变能力和能量密度, 因而产生的力和应变较传统作动器更大[33].
此外,学者们还对作动器的结构形式进行了优化.Gardonio等[36]提出了半主动控制的吸振器调谐方法,以减小船舶控制元件在低频段弯曲模态的共振响应.Wang等[37]提出了一种自动搜索作动器最佳安装位置的控制系统.Hu等[38]探究发现,增加倾斜角度和尺寸大小作为作动器结构优化的参数,相比只将位置作为优化参数可以显著提升减振效果.可以看到,对于未来主动控制作动器的研究,涉及到学科交叉应用的越来越多,这需要学者们了解多种学科知识,善于将其他领域的新型发现应用在减振降噪领域中,并根据实际工程需求运用自身的力学和声学知识进行优化.
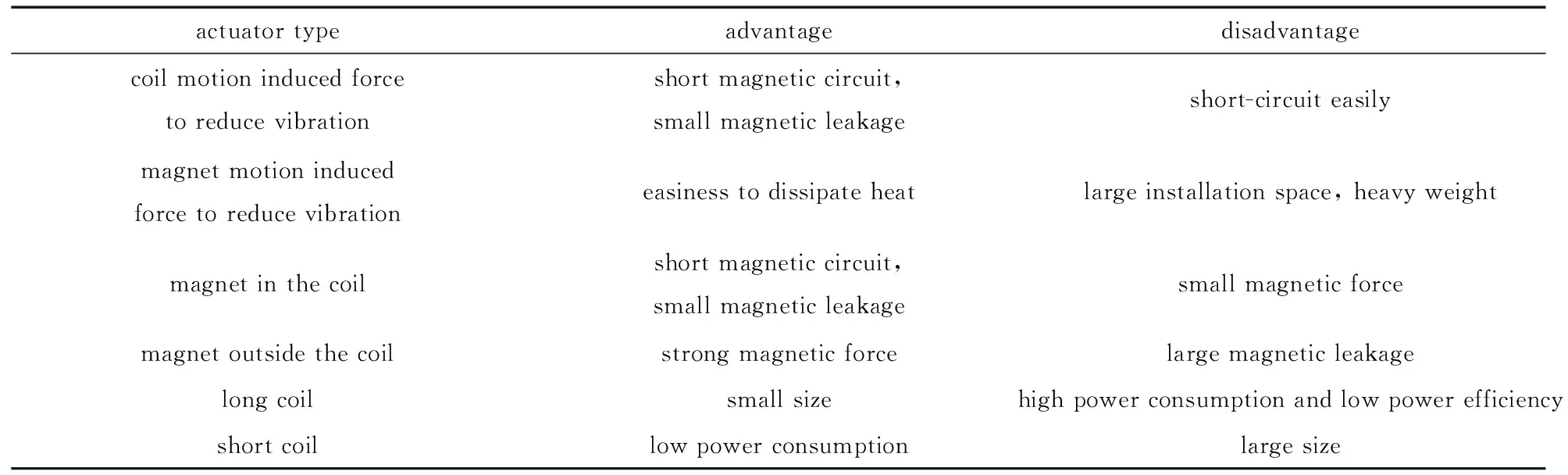
表1 不同类别电磁作动器的优缺点[31]
1.2.2 主动控制策略
控制策略的选择决定作动器产生的作动力是否能正确抵消输入的振动,这对于船舶机械系统主动控制十分重要.控制策略的选择决定主动控制系统正确处理输入信号和误差信号并产生输出信号使作动器产生作动力以抵消机械设备的振动.常用的控制策略有独立模态空间法[39]、最优控制法、鲁棒控制法[40]、速度负反馈[41]、正位置反馈[42]、PID控制[43]、自适应控制法等[44].独立模态空间法的各模态互相解耦,可以独立地控制某一模态,是主动控制的一种重要方法[39];最优控制法的原理[40]是在每一时刻都把当时的系统状态当作初始状态,再通过极大值原理求解;鲁棒控制法实质是预测未来隔振系统的最值问题;速度负反馈将反馈的速度信号直接发送给作动器实施激励[45];PID控制又称比例-积分-微分控制,它的控制原理是根据输出信号与设定值的偏差经由比例环节、积分环节、微分环节进行控制缩小;自适应控制就是寻找自适应滤波器的最佳权值.
近年,学者们对传统的船舶机械系统主动控制策略进行了进一步改良.Soni等[46]对主动控制提出了三元控制和四元控制两种控制策略,并与PD控制和PID控制相比较,发现可以有效抑制振动传递.为减小忽略高阶传递函数所造成的闭环效应溢出的影响,Marinangeli等[47]在传统的谐振控制、调谐控制等控制策略方法的基础上,提出了一种分数阶正位置反馈补偿器.袁明等[48]在正位置控制策略的基础上提出了加速度控制策略,并开展了多模态振动主动控制试验进行模态分析,发现基于加速度的控制策略能进一步提升机械系统减振降噪的效果.杨晨[49]将主动控制与神经网络相结合,以达到控制系统在低频段更好的减振效果.Kamaruzaman等[50]考虑将非线性问题在多个点上使用线性最优控制以解决非线性问题.王俊芳等[51]提出了新的自适应控制算法改善控制器饱和问题,改善了隔振效果.曹斌芳[52]讨论了VSSLMS算法,相较于其他LMS算法,这种算法能根据信号的强弱来调整步长大小,从而达到在非平稳随机信号中仍然可以跟踪信号.张旻旻[53]使用FxLMS控制策略进行自适应噪声主动控制,从而消除了电声器件声信号和次级声源声延时的影响,提高了有源控制的作用精度.
由上述文献可知,学者们对于控制策略的改良目标主要在于提升控制效果、增大初始可行域和减小计算量.此外,随着对海洋的不断探索,船舶界与海洋工程界对工况的需求由单一变得多样、由简单变得复杂.因而,除了对控制策略自身进行改良,满足工程背景新的需求也是未来控制策略研究的一个重要方向.
1.2.3 主被动交叉耦合隔振
主被动交叉耦合隔振的应用背景是为了设计出一套在全频段都具有良好隔振效果的机械减隔振系统.经过学者的研究和设计,被动隔振器在中高频段的隔振效果得到了很大提升.然而,被动隔振器的一大缺点是对于低频的隔振效果不佳——被动隔振的隔振机理使得它在低于机械系统本身的固有频率的频段隔振效果不佳[54],甚至在固有频率处机械减隔振系统反而会放大振动.而主动控制的应用可以有效提升对低频段的隔振效果,但主动控制需要配备控制回路和能量源,需要较大的安装空间和成本.因而学者们考虑结合主动隔振和被动隔振,以达到在更宽的频段内机械减隔振系统都具有良好的振动阻碍作用.
很多学者设计了主被动集成隔振系统并通过设计试验来验证设计后隔振性能的提高:吴磊[54]针对船用6135柴油发电机组的减振需求,采用模块化设计思想,将主动控制系统与双层被动隔振系统结构相结合进行集成化的主被动隔振装置设计,并测量了不同转速工况下的柴油发电机组的振动响应,最终验证了主被动集合隔振装置的有效性.Li等[55]将非接触式磁悬浮驱动器集成到空气弹簧中,采用主动控制与被动控制相结合的方法来进行隔振.Niu等[6]考虑将机器控制(主动控制)和浮筏控制结合为完全控制,以功率流的传输效率为评判标准,将之与机器控制(主动控制)和浮筏控制相比较.此外,学者们以主被动集成系统的某一物理参数为基准进行了优化设计.Kamaruzaman等[50]针对一个六自由度零刚度磁悬浮系统,研究了主被动刚度的关系,以达到隔振器阻碍振动传递效果最佳,此外考虑分散PD控制策略,以解决交叉耦合的现象.马召召等[56]采用电磁作动器主动单元与橡胶液压被动单元并联结合的方式设计主被动混合隔振器,并将自适应控制引入到主被动混合隔振系统中,以隔离船舶动力设备产生的低频线谱噪声.还有的学者将主动隔振与半主动隔振相结合:Hasheminejad等[57]基于主动和半主动混合控制,采用由串/并联压电作动器表皮层和半主动电流变液核心层组成隔振系统[58].主被动耦合隔振除了对于力学特性的不断研究,同时考虑了主被动耦合隔振会造成减隔振机械系统体积过大,如何在不损伤或者小损伤减隔振效果的基础上减小减隔振机械系统的体积也是一个重要的研究方向.
2 动力吸振技术
动力吸振器是由振子、弹性元件和阻尼元件组成的子系统,附加在需要减振的结构上,其物理模型可建立为一个“质量-弹簧-阻尼”系统.其中,被动动力吸振器减振的原理为利用子系统附加在主系统上以吸收它的振动能量,主动动力吸振器减振的原理为给定一个与激励相位相反的作动力来抵消振源的振动,以减少传递到控制物上的振动[46].
2.1 被动动力吸振器
被动动力吸振器可以有效消除船舶机械减隔振系统低频段的振动峰值,但起作用的频段较窄.被动动力吸振器可以看作附属于受控对象的一个子系统,具有一定的质量、刚度和阻尼,通过附属子系统的振动重新分配一部分振源的振动,以减少受控对象的振动[59].因为线性元件具有概念简单、易于计算的特点,被大量使用于传统的动力吸振器的阻尼元件中.但当固有频率偏离传统动力吸振器减振性能好的特定频率范围之后,传统的动力吸振器的减振性能会急速下降[60].由于被动吸振器的作用频段范围较窄,被动吸振器一般被用于解决原主系统的共振问题.
为进一步应对机械噪声频段较宽的工况,非线性吸振器应用频带宽的特性越来越受学者们重视,非线性能量汇就是一种在船舶机械减隔振领域中广泛应用的非线性吸振器.非线性能量汇的作用机理是振源的能量单向传递到非线性能量汇中,受非线性能量汇中的阻尼作用抵消[61].
双稳定非线性能量汇的鲁棒性好,低频段减振性能好,但质量较大;声学黑洞可减轻结构质量,提升结构高频段减振性能.Jiang等[7]研究了隔振和吸振的耦合机理,在此基础上设计了一种非线性被动隔振系统,并采用谐波平衡法评价,发现隔振和吸振被动集成的隔振系统相比单一隔振系统具有更好的减振性能.Wang等[62]考虑结合双稳定非线性能量汇和声学黑洞结构,同时提升了它在低输入能量和高输入能量下的减振性能.Sheng等[63]研究了影响动力吸振器振动控制效率的因素,为扩宽动力吸振器衰减带,结合失谐效应和声黑洞效应,提出了新的调谐规则.孙斌等[64]针对机械设备双频带激励特点,利用MATLAB中四阶Runge-Kutta数值算法对比研究了耦合NES和线性动力吸振器的减振效果.
非线性能量汇的减振效果很好,但是适用的能量带宽较窄.可以和其他的隔振方式耦合适用,以期适用的工程问题范围更广.
2.2 主动动力吸振器
在实际工况中,船舶机械系统往往面临频段宽具有多个振动峰值、激励频率变化大的振动噪声环境,这时被动吸振器很难达到理论上的最优隔振效果,主动吸振器适用于抑制宽频段的振动,在船舶机械系统减振降噪方面具有非常大的意义.在作用机理方面,主动动力吸振器是一种有源吸振,在被动吸振器的基础上增加了作动器,根据受到的干扰施加一个抵消振源的作动力[65].
学者们也将新型材料应用于动力吸振器的主动控制中,以期船舶机械系统获得更好的吸振性能:基于比例积分主动控制策略,Kassem等[66]设计了一种复合材料吸振器,能有效抑制环向振荡.
在实际应用中,常常将动力吸振器安装在船舶隔振系统中,以更好地阻碍振动传递:Rasid等[67]基于传感器融合法,考虑将主动动力吸振器引入到主动隔振系统中,以得到更高的性能.其中主动动力吸振器在低频段作为传感装置,高频段作为控制装置,以更好地辅助主动控制机械系统减振降噪.
由于主动吸振器仍然考虑使用作动器产生作动力的方式来提升减隔振效果,可以借鉴参考主动隔振的研究成果,甚至与主动隔振系统集成耦合后使用.
2.3 新型动力吸振器
主动动力吸振器虽然吸振效果好,但成本较高,体积较大,新型动力吸振器在具有抑制宽频段多峰值能力的同时成本和体积都比主动动力吸振器小.学者们尝试将智能材料应用于动力吸振器的研究上或设计出自适应的半主动动力吸振器.它们的作用机理是可以调整吸振器的质量刚度等物理参数,从而改变自身的固有频率,使得半主动动力吸振器可以根据主系统激励频率的变化达到实时最优的隔振效果.新型动力吸振器相较被动动力吸振器具有调整频段宽,适用于变频激励的特点;相较于主动动力吸振器可以节省作动器的安装空间,在安装便捷性上具有更大优势,适用于安装空间小的工况.
杨志荣等[68]结合智能材料磁变流体,提出了一种新型船用磁流变体吸振器,并探究了它的固有频率改变规律,固有频率的变化与电流的变化成正相关,与温度的变化成负相关,初始温度(15 ℃)下施加8 A电流,吸振器移频可达到27.5 Hz.李浩田等[69]提出了一种空气-磁流变液半主动动力吸振器,它的机理是通过空气弹簧实现可变刚度,通过磁流变液阻尼器实现可变阻尼.负刚度动力吸振器在低频区没有传统动力吸振器的减振效果好,因而邢昭阳等[70]根据on-off控制策略,设计出一种控制回路,使得吸振器随着不同频段的干扰改变负刚度k的数值,从而综合传统吸振器和负刚度模型的优点,在宽频段内抑制振动.王田[71]基于形状记忆合金、光滑不连续振子和磁流变液,设计了一种具有非线性的变频变阻尼半主动动力吸振器,并将加速度作为评价吸振器的力传递率指标,发现可以通过温度和电流强度来改变刚度、阻尼等参数以达到针对宽频段仍有良好的减振效果.Kecik[72]采用压电材料和磁致伸缩材料设计一种可以回收能量的动力减振器.它的机理是:压电系统受外力作用变形,当使用磁致伸缩材料时,不仅会产生电流和电压,同时会产生磁场,电磁系统又将剩余的动能转化为电能.李凯翔等[73]设计出根据追踪传感器主系统上实时的频率变化自动调节自身固有频率的自适应动力吸振器.
半主动吸振器的优势在于增加了自身吸振效果较好的频段范围,同时不需要安装能量源,能有效减小吸振系统的安装体积.将新型材料和新型结构形式应用于半主动吸振器,使其自适应更灵敏准确,是减振降噪的一个重要方向.
3 研究与计算方法
准确预报机械结构的振动噪声对船舶的减振降噪非常重要.随着计算机技术的发展,机械噪声预报方法在国内外已有广泛的研究,取得了丰富的研究成果:学者们研究了模态综合法、频响函数法、四端参数法、有限元方法、统计能量法、功率流法等方法进行机械减隔振系统的建模计算.可用解析法、数值法或两者结合的方法来计算弹性结构振动声辐射,其中解析方法要求计算的结构简化为经典的模型,如梁、板、圆柱面、球壳等.数值方法则适用于复杂结构的建模计算,但随着计算模型单元数的增加,对计算机的性能要求急速增加,计算时间较长[74].
3.1 理论建模与数值计算方法
学者们常基于模态的角度分析船舶机械系统的振动和声传播问题.模态包含固有频率和振型等动力学属性,在分析机械系统的振动特征时,学者们常常将物理坐标方程组转化为模态坐标方程组并进行解耦,这就是模态分析方法[75].浮筏隔振系统的子系统越多,则刚体模态越多,各阶固有频率的间隔越小,杨晓一等[75]针对这个问题,运用模态分析法对筏体结构质量和隔振器布置做出了优化调整,使得模态固有频率避开共振区间.要进行模态分析首先要进行模态参数识别,学者们将模态参数识别的方法按识别域分为时域法、频域法,近年来也有人结合频域方法和时域方法的思想联合求解模态参数[76].
由于直接使用有限元法进行筏架的建模存在计算量过大的问题,张华良等[17]采用超单元法进行筏架的建模.超单元法将模态综合法与有限元法相结合,在大幅减小建模规模的基础上可以保留较完整的低频特性.李中付和华宏星[77]基于模态分析原理,提出了时频域联合方法,将传统模态识别方法适用的激励由白噪声激励拓展到了非稳态激励,根据多自由度线性结构响应辨识了结构的模态参数.黄继嗣[78]为验证主动控制对低频线谱的噪声控制效果,开展了管路多线谱噪声试验,试验结果表明,管内降噪效果可以达到10 dB以上.
频响函数综合子结构方法是子结构方法中的一种.首先将结构划分为若干子结构,得到内点和连接点的位移与力的关系矩阵,即是频响函数矩阵,在装配综合后可以得到整体结构的频响函数综合矩阵.频响函数法的优势在于可以直接使用试验得到的数据,消除一部分计算误差,尤其是中高频模态密集的频段,频响函数法仍然可以保证计算的准确性.
薛伟敏和华宏星[79]介绍了频响函数法解决高频段问题的优势及频响函数法的发展;黄修长等[80]配合频响函数法,设计了灵敏分析方法,对隔振器进行了优化;高云剑等[81]采用频响函数法对浮筏隔振器进行传递误差分析,并通过矩方法对传递误差进行定量分析;况成玉等[82]运用频响函数法评价周期性桁架浮筏在高频段抑制振动传递的性能并与传统浮筏相比较,发现周期性桁架浮筏在高频段能更好地抑制振动传递;程世祥等[83]基于频响函数法研究设计出周期性桁架浮筏,并进行激振实验,验证了其相较于传统浮筏在高频段具有更好的隔振性能.
此外,也有学者研究通过试验方法确定算法的输入动力学参数,例如四端参数法.四端参数网络法的原理是将复杂机械系统分解为单个黑匣子子系统,给出了一个四端参数矩阵,再对多个子结构进行串联和并联.张峰[84]基于四端网络参数法建立了计算浮筏隔振系统的振动传递的方法和空间浮筏的设计模型(图3).

图3 单输入单输出线性机械系统[84]Fig. 3 The single-input-single-output linear mechanical system[84]
由于考虑振动噪声沿机械隔振系统传递方向带来的解耦问题,四端参数法一般只考虑筏架由法向方向向基座传递的噪声物理参数,但纵向和切向的输入量同样影响法向的输出量,考虑三方向的耦合能进一步提升四端参数法的准确度.
3.2 直接数值计算方法
直接数值方法是指单纯采用有限元/边界元方法求解问题,它的好处是可以精确计算形状复杂的结构,但对硬件需求高,在计算大型结构时需要很长的时间.有限元法是对结构和流体都进行有限元网格离散,再建立方程进行分析,适用于非线性、多介质问题[85],但不适用于开域无限空间;边界元法可以良好地适应无限域、半无限域,因而学者们考虑使用有限元-边界元混合方法进行噪声预报[86].
学者们在分析优化基座和浮筏隔振时常用有限元方法进行建模计算以分析机械系统的振动规律.谭星星[87]对基座进行有限元建模并计算得到了基座的阻抗,再根据计算得到的阻抗结果对基座进行结构优化,减少了基座的总重量和阻抗离散度,提升了基座阻碍振动传递的效率.王宇等[88]运用有限元法对浮筏隔振系统进行建模计算,以寻找显著影响机械系统振动的物理量.杨东杰[89]基于等效导纳法对圆柱壳和浮筏隔振系统进行了研究,并通过有限元法建立了圆柱壳和机械系统的模型,通过模态仿真分析验证了机械隔振系统的振动传递规律.有限元法可以建立非常复杂的模型,但在进行复杂结构模态分析时需要计算的模态太多,因而学者们采用了不同的方法进行有限元计算的简化.吴轶钢[90]考虑使用零阶能量有限元法,该方法使用有限体积法简化了功率流法,不需要在连接不连续处进行节点处理,并进一步和边界元法相结合,相比传统的有限元法/边界元法提升了计算量.为计算复杂线型结构,方斌等[91]简化了Gordon方法,用节点位移量代替节点速度简化了有限元/边界元的计算过程.Zhang等[92]在最小二乘近似的基础上提出一种双层插值法,使得网格数减少的同时提升了计算精度.
有限元/边界元方法是一种直接数值算法,这种方法的优势在于可以计算潜艇机械系统中的复杂结构,但不能进行机理研究.同时考虑到计算量,学者们还考虑了数值/解析混合计算方法:将潜艇的外壳简化为圆柱壳,用解析法进行求解,内部的机械系统采用有限元法进行建模计算[93].刘涛等[94]采用解析/数值混合方法对有限长加支座的圆柱壳进行声辐射预报,发现当基座与壳体的尺寸比和质量比很小时,基座的振动传递计算可忽略水介质的影响.
传统的数值计算方法以位移为主要变量,与力、速度等动力学参数建立动力学方程,但在涉及到声振耦合这样的多系统计算时物理参数换算比较麻烦,用能量作为主要变量可以有效解决这一问题.统计能量法和功率流法都是在这一思想的基础上建立起来的.
统计能量法的对象是相似模态的集合体,也称为子结构,如杆、板、梁等的某一振动模态可以看作一个子系统.对于高模态的子系统,将他们的频率、振型、阻尼处理成随机变量.最后建立外界输入的功率流和子系统的输出功率流之间的关系.统计能量法是进行整体的平均预报而非局部的精确预报,将预报得到的能量转换成所需的力学参数.统计能量法要求模态密度高,而中频段分析的模态密度达不到统计能量法的要求,为拓展分析频段,学者们又提出了基于波动理论的功率流方法,其好处是不要求高模态密度.
刘见华等[95]考虑由于振动和声模态在高频段密集的特性,不宜用模态法解决高频振动问题,而使用统计量描述系统的振动规律;李志远等[96]针对具体设备浮筏铺设情况建立了统计能量模型,计算结果显示该方法适用于中高频段,低频段计算精度略有不足.吴江海等[97]通过比较功率流贡献量发现浮筏隔振系统对300 Hz以下的机械设备的低频振动隔振效果差,并采用路径分析方法探究主动控制系统的最佳安装位置.邹涛和洪明[98]研究了负功率流出现在传递过程中的原因.
运用建模计算方法进行噪声预报是为了更好地设计水下船舶减隔振机械系统,以期满足工程应用背景中的减振降噪需求.因而,算法需要计算效率越来越高、计算精度越来越符合实际,才能更好地指导水下船舶机械减隔振系统的建设.因此,学者们对算法的研究一方面在于减小计算量,想办法将不重要的单元乃至结构进行理论简化;另一方面对于简化后的计算结果仍然需要满足工程实际问题的精度要求,并通过试验加以验证.
4 总 结
本文对机械系统噪声预报和治理的方法进行了梳理:为了使得机械减隔振系统的计算精度更高、成本更低、体积更低更便于实船安装,减振降噪的频段范围更宽(如固有频率之下频段的减振降噪问题),学者们从多方面对机械减隔振系统进行了进一步改良.
1) 考虑在船舶机械隔振系统中使用新型智能材料和新型结构,例如对于非线性准零刚度隔振器、声学黑洞等隔振方法的研究,可以显著提升被动隔振的效果,使得浮筏隔振系统的被动隔振性能设计变得更精准和更便于调控.主动控制的研究方向主要包括作动器和控制策略的研究.现阶段主动控制的研究目标在于:进一步提升主动控制的反应速度和制动范围,同时减小主动控制系统的体积.在结合主动控制和被动控制时要考虑它们的耦合作用,以及针对应用工程背景做出优化.今后船舶机械隔振系统的设计和优化方向在于:在保证100~200 Hz以下低频振动隔振效果的同时减小机械减隔振系统的体积.
2) 主动吸振器和半主动吸振器使得动力吸振器具有宽频段振动抑制的效果.其中主动吸振器需要控制回路和次级振源,进一步减少主动吸振器的体积是未来的发展方向.同时,由于原理都是通过作动器产生作动力来抵消振动,可以将主动吸振器与主动隔振耦合使用;半主动吸振器本身体积较主动作动器更小,但同时由于可调节自身物理性质,适应的频段较被动吸振器更宽,是一种非常好用的吸振方式.采用新型材料或新型结构设计半主动吸振器,提升其灵敏度和准确度是一个非常好的研究方向.此外,非线性能量汇是一种减振效果优秀的方法,但适用的能量频段范围较窄,与其他减隔振方法集成耦合使用是未来船舶机械系统减隔振的一个重要方向.吸振器未来的发展方向在于为宽频段多峰值的振源设计有效的小体积吸振系统.
3) 论述了模态综合法、频响函数法、有限元/边界元方法、统计能量法、功率流法、四端参数法等常用的建模计算方法.学者们通过模态分析、仿真计算、试验验证的方式探究系统的振动规律和机械系统减隔振效果的影响因素,并为机械减隔振系统的设计和安装提供依据.总的来说,学者们在针对工程应用背景的需求前提下,提炼出需要设计和优化的主要问题或主要结构,运用振动力学和声学的理论对方程进行简化,再将简化后的各子系统进行集成耦合,最后辅以试验验证.噪声预报的未来发展方向在于: ① 如何在计算方面保证计算精度的同时尽可能地缩减计算量,减小计算时间; ② 强化船舶振动噪声测试技术研究,增加评估船舶机械系统减振降噪效果.
