攀爬除锈机器人的系统研究*
2024-01-03赫乾辰施嘉胜李小鹏乔俊福
赫乾辰,施嘉胜,李小鹏,乔俊福
(太原工业学院,山西 太原 030008)
0 引言
我国是全球最大的修船国,目前船舶除锈工艺主要采用手工除锈、机械除锈,劳动强度大,除锈效率低,且工作环境恶劣,是典型的劳动密集型产业,存在着用工成本高、用工模式单一等问题。除锈过程中矿砂接触铁锈产生大量的粉末,粉末经过风力的作用进入空气中,或沉积于船坞中,造成空气和水体污染。目前大部分发达国家已经全面禁止采用手工喷砂除锈,因此研发攀爬除锈机器人具有重要的意义和价值。攀爬除锈机器人具有操作安全可靠、成本低、工作效率高、排放量少、绿色环保等优势。从产业链来看,上游为原材料及设备供应商,涉及金属、塑料、控制器、高压泵、真空系统;中游为机器人生产商;下游为船舶修理企业。研发攀爬除锈机器人符合当下船舶行业机械化、自动化、环保发展理念,为此,本文设计了一种攀爬除锈机器人。
1 攀爬除锈机器人的结构设计
攀爬除锈机器人由四足机构、脚部机构、除锈机构、安全模块、视觉模块、运动控制模块组成,在六大模块的相互配合下可以更好地完成监测与除锈的任务。攀爬除锈机器人的整体结构如图1所示。
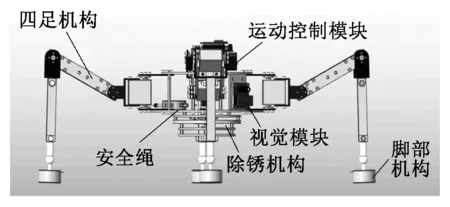
图1 攀爬除锈机器人的整体结构
2 机械结构的设计
2.1 机身尺寸
机器人机体的最大直径为200 mm,总高为224 mm。四足的总长为350 mm,最宽处为56.7 mm。因为连接件部分尺寸重合,经测量机器人整体的最大直径为900 mm。
2.2 四足机构设计
四足机构的设计参考了蜘蛛的肢体结构,通过对蜘蛛的肢体结构进行研究设计了这款攀爬除锈机器人。机器人的四足机构如图2所示。
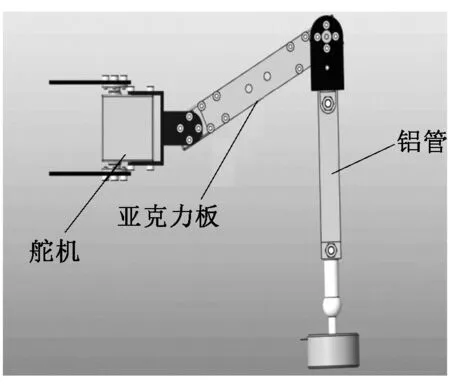
图2 机器人的四足机构
机构整体的上、下底板分别采用厚5 mm、直径分别为160 mm和200 mm的亚克力板。其中大腿部位由4 mm亚克力板连接,小腿部位由15 mm×15 mm×2 mm的方型铝管连接,保证了机器人在行走过程中的稳定性[1]。每条腿安装3个扭力为20 kg的舵机,共有12个自由度,这样的设计使得机器人在跨越障碍时更加有力。
2.3 脚部机构设计
经测量,攀爬除锈机器人的总重为4.5 kg,为了使机器人稳定地吸附在墙面上,我们在每条腿上安装了一个吸力为200 N的电磁铁,4个电磁铁可以为机器人提供800 N的吸力,可以使其很好地吸附在船舶表面。经计算,安全系数为17.7。电磁铁与铝管之间使用球头直杆轴承连接,有利于电磁铁与船舶表面更好地贴合,使机器人整体的灵活性提升[2]。
2.4 除锈模块设计
脚部机构和四足机构的设计保证了机器人在作业面的灵活移动,但是在工作过程中还需要有高效的除锈模块,本文设计的除锈模块由动力装置、执行装置、缓冲装置和吸附装置构成,其结构如图3所示。动力装置为一个可360°旋转的大扭矩单轴舵机,给执行装置提供动力;执行装置为贴有魔术贴(用于贴砂纸)的砂纸盘,此装置用来完成除锈工作;缓冲装置由金属钢圈、缓冲盘、弹簧组合而成,用于降低除锈模块工作时产生的震动对机器人的影响[3]。
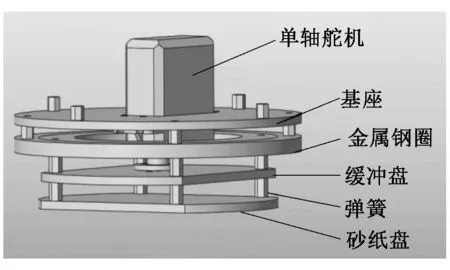
图3 除锈模块结构
机器人在船舶表面上爬行,走到有铁锈的地方牢牢吸附,随后身体缓慢下沉,当砂纸盘碰到铁锈,随后启动舵机,带动砂纸盘在铁锈上不断摩擦旋转进行除锈工作。
2.5 安全模块设计
在机器人工作过程中,为了避免由于电池断电、供电故障、电磁铁损坏、电控元件短路等原因造成电磁铁不工作,导致机器人跌落从而引发安全事故,我们在机器人主体结构上加装一根可自由伸缩的安全绳,如图4所示。工作前,将安全绳的一端提前系在工作区域的上方,机器人正常工作时安全绳不参与工作,发生意外导致机器人跌落时安全绳快速介入,防止事故发生。安全模块在不影响机器人工作的同时保护了机器人,也保护了工作人员。
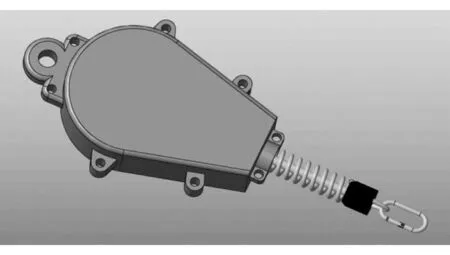
图4 安全绳
3 控制系统设计
3.1 运动控制模块
控制系统采用ESP32单片机作为主控制器,安装有IMU模块、舵机控制模块。通讯方面选择了蓝牙模块。电源管理采用外部电源供电,保证了机器人的长续航。
3.2 视觉模块
视觉模块采用OpenMV4摄像头和配套的WIFI扩展板[4]。通过设置热点,从客户端接受请求,初始化模块,传输视频。
4 样机效果
制作的样机如图5所示,蓝牙模块发送指令控制其运动。经过测试攀爬除锈机器人可完成移动,监测模块可以流畅地传输图片。
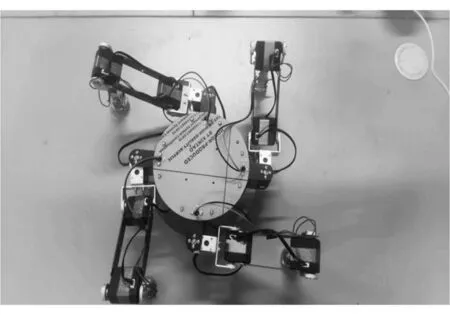
图5 制作的样机
5 结束语
设计的攀爬除锈机器人以ESP32单片机作为控制核心,使用总线舵机作为机器人的动力来源,它具有12个自由度,可灵活地吸附在船舶上,视觉模块采用OpenMV模块及相关图传技术,方便快捷。攀爬除锈机器人主要适用于大型船只的船体除锈工作,具有高机动性、高灵活性、高安全性的特点[5]。
