基于Arduino起重运输机器人的设计*
2024-01-03杨得胜程嘉豪吕婷婷谭伟俊蔡琼仪何伟锋
杨得胜,程嘉豪,吕婷婷,谭伟俊,蔡琼仪,何伟锋
(东莞理工学院 机械工程学院,广东 东莞 523000)
0 引言
随着现代化工业制造技术的快速发展,智能制造已经成为了现阶段的主流趋势[1,2]。而物流产业也在日渐发展,货物的存储、搬移、运输等环节的自动化程度也越来越高[3],自动化生产已成为工业流程中的重要组成部分。采用自动化物流搬运,能提高产品的运输效率、降低用工成本、提升企业的自动化水平和竞争力,保证生产过程的安全性和可开发性。因此,自动化运输已成为现代化智能工业制造中不可或缺的一环。如何提高物品运输机器人的灵活度、保证工业生产的高效率和低成本,实现更为高速的运行、精确的识别和搬移运输,已是目前起重运输机器人研发的热点。因此,在满足以上条件下实现物品的自动化运输是当前亟待解决的主要问题。
针对以上问题,自动化起重运输机器人被提出并得到了相关应用。该机器人主要以嵌入式系统和自主控制技术实现自动化运输,其具备搬移载物、自动循迹避障、自动装夹等功能,故其设计与生产过程涉及多个领域的技术运用[4]。对此,本文旨在设计一款基于Arduino Mega2560和Arduino Uno单片机,结合步进电机驱动器、超声波模块、步进电机驱动模块等硬件的新式起重运输机器人。该机器人能够实现对信息的读取和处理、路线循迹、主动避障、物品识别和抓取摆放、任务完成反馈等功能。通过软件编程和多次测试,该机器人系统稳定,搬运效率和完成度较高,实现了自动化物流搬运的目的,提高了作业的效率和安全性,满足了现代社会智能自动化作业的需求。
1 起重运输机器人的整体设计分析
本文设计的自动化起重运输机器人以Arduino作为检测抓取和移动控制核心,完成识别、路径循迹追踪、物品抓取运输等功能,机器人整体结构如图1所示。
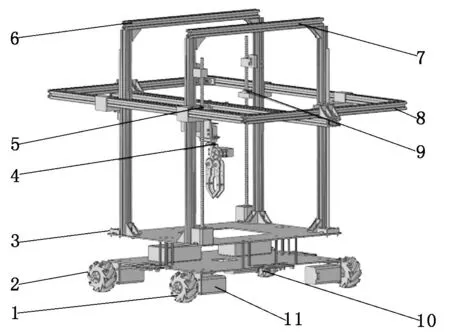
1-麦克纳姆轮;2-行走驱动组件;3-机器人车架;4-滑移抓取组件;5-滑移驱动机构;6-前侧龙门架;7-后侧龙门架;8-活动升降架;9-升降驱动机构; 10-灰度巡线传感器;11-行走驱动电机
该机器人主要实现较重物品的搬移运输工作,在机器人车架上端紧固安装有铝合金材质的前侧龙门架、后侧龙门架,前侧龙门架位于后侧龙门架的前端侧且前侧龙门架与后侧龙门架前后对齐间隔布置。在机器人车架的下端装设有行走驱动组件,四个呈矩形分布的行走驱动安装架分别螺装紧固于机器人车架底座上,安装架上装有4个行走驱动电机并连接4个麦克纳姆轮[5],该设计能保证运输过程中机器人的平衡行驶和物品抓取的牢固度。同时在车架底座安装有灰度巡线传感器进行巡线定位,以使得机器人能精确到达物品的取件位置以及放置位置,更好地完成物品运输任务。
物品抓取工作由活动升降架及滑移抓取组件联合完成。升降驱动机构可保证活动平台能在丝杆的带动下流畅运动,并确保活动平台在承受足够重量的同时保持平衡[6]。升降驱动机构包括有紧固安装于车架底座的丝杆步进电机,丝杆步进电机的驱动丝杆上端部通过轴承座安装于前侧龙门架和后侧龙门架上。活动升降架活动方式为:步进电机转动,带动丝杆结构上的升降驱动块。丝杆步进电机与活动升降架连接,联合超声波模块确定活动升降架的活动距离并完成升降工作。同时,活动升降架上设置有沿着前后方向水平延伸的悬吊滑轨,悬吊滑轨从前至后依次穿过前侧龙门架、后侧龙门架,形成稳定的结构。悬吊滑轨装设有滑移抓取组件,由滑移驱动机构、两个舵机与机械手爪组合完成,实现物品的抓取并正确实现物品摆放的方向及位置。
滑移驱动机构包括有位于悬吊滑轨下方的滑移活动架,悬吊滑轨开设有朝两侧开口且沿着前后方向延伸的左、右侧滑槽,滑移活动架装设有伸入至两侧滑槽内且沿着滑槽滚动的左、右侧悬吊轮,左侧滑槽内装设有沿着左侧滑槽延伸的同步带,同步带的前端部、后端部分别紧固于悬吊滑轨相应的前端部、后端部,同步带的左侧面为非齿面、右侧面为齿面。此外,滑移活动架装设有滑移驱动电机,滑移驱动电机的动力输出轴装设有位于两个左侧悬吊轮之间的同步带轮,同步带轮与同步带的齿面相贴合,同步带的非齿面分别与两个左侧悬吊轮相贴合。机械手爪安装在滑移活动架的下端部,方便对物品的抓取和摆放。
该机器人结构设计新颖,且能够实现悬吊起重运输,尤其适用于较重物品搬移运输。
2 电路硬件系统设计分析
该机器人的电路硬件系统主要由超声波模块、直线丝杆步进电机、电机驱动模块、循迹模块、稳压模块等组成,其系统设计框架如图2所示。
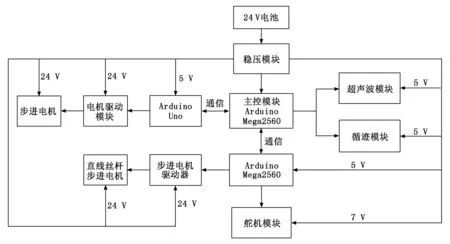
图2 起重运输机器人的电路硬件系统设计框架
2.1 超声波模块
HC-SR04是一款超声波测距模块,常用于测量距离和检测障碍物。发射器发射超声波信号,信号经过空气中的传播到达目标物体并被反射回来,接收器接收到反射回来的超声波信号并将其转化成电信号,模块将接收到的电信号转化成数字信号,并将其输出到控制器中,根据声速在空气中的传播速度和信号来回的时间差,控制器通过计算进而可以得到发射器与障碍物的距离[7]。在本装置中超声波模块用来测量升降架与所需夹取物品之间的距离,判断在此位置是否能够夹取物品。
2.2 直线丝杆步进电机
直线丝杆步进电机是一种将旋转运动转化为直线运动的装置,其基本结构包括步进电机、丝杆和螺母。当电机旋转时,丝杆与螺母配合使螺母沿着丝杆轴向移动。42步进电机是指外径为42 mm的一类步进电机,通常采用两相四线式接线,驱动电压为24 V,具有精度高、运动平稳等优点。该机器人采用螺纹丝杆步进电机,其优点在于它可以精确地控制转动角度和速度,并且不需要外部的传感器或反馈控制系统即可带动升降架平稳上升或下降。
2.3 电机驱动模块
该机器人采用了完全适配Arduino Uno单片机的4路步进电机驱动板,其能够执行按方向运行指令、四轮差速运行指令、停止运行指令,同样兼容常规的距离控制和速度控制指令,可以精确控制麦克纳姆轮运动距离和运动速度,实现机器人的高精度运动。采用的4路步进电机驱动板包括4个步进电机驱动器芯片和若干控制逻辑电路。每个步进电机驱动器芯片可以单独控制步进电机,通过调节输入的脉冲信号和方向信号即可控制步进电机的转动方向和步数,其具有高精度、高可靠性、小体积、低噪声等特点。
该机器人还采用了Emm_42V4.x步进闭环驱动器,这是一种高性能闭环步进驱动器,可以用于控制步进电机的旋转,其通过闭环控制技术来提高电机精度和响应速度。该驱动器具有多种保护功能,如过流、过压、过热等保护,可保护电机和驱动器免受损坏,并且能够实现位置、速度和力矩控制等功能,在运行时不容易出现丢步。
2.4 循迹模块
为完成物品的搬运,机器人将按照规划好的灰度路线行走,采用五路灰度传感器(配有定制的遮光屏蔽罩)根据指定的路线完成任务。五路灰度传感器是一种电子元件,一般用于识别黑线,检测面上光的反射程度与所识别的颜色有关,颜色不同则反射程度也有所不同。利用灰度接收管对被探测面颜色光反射强弱进行采值,探测到的不同颜色对应不同的电压值信号,最后将电信号传送到Arduino单片机中进行处理。在一定的距离范围内,高亮聚光LED照射在检测面上,光线被反射面反射,通过灰度接收管检测光的强度之后再将数据传输到控制单元中[8]。通过分析以上数据,机器人可以自动根据预定路线行驶,实现自动巡线功能。
2.5 稳压模块
DC-DC降压稳压电源模块是一种电子元器件,用于将输入电压降低到相对较低的输出电压,并保持输出电压稳定。稳压电源模块通常由一个开关电源和一个稳压器组成,开关电源将输入电压转换为高频脉冲信号,稳压器则将这些脉冲信号转换为稳定的输出电压。DC-DC降压稳压电源模块具有高效率、小尺寸、低成本和高可靠性等优点,它能为Arduino单片机模块提供稳定的小额电压,防止其烧坏。
3 软件系统分析
起重运输机器人采用Arduino编程软件,选型为Arduino Mega2560,其根据Emm_42V4.x步进闭环驱动器实现起重运输机器人轮子的控制,进而完成机器人前进和转向功能[9]。在此基础上,机器人需要完成自动化搬运任务[10]。
在该软件系统设计中,起重机需要依次完成多项任务:调用巡线避障模块,实现自动取样、自动计算灰度平均值,并将所获取的灰度值与灰度平均值进行比较,输出控制信号,从而实现精准的循迹路线和接受特定灰度条件下的对应指令;运用电机驱动模块控制麦克纳姆轮的多方位运动,实现机器人的平衡行驶;启动超声波模块,通过时间差和声音传播速度,计算出升降架与物品之间的距离,从而判断出在合适的位置夹取物品,发出控制活动升降架升降运动的指令[11];调用丝杆步进电机控制升降驱动机构,完成活动升降架的升降工作,从而达到指定高度;通过滑移驱动电机带动机械手爪的移动;通过一个舵机控制机械手爪的张开和闭合[12],抓取物品;达到指定位置后,运用另一个舵机的转动实现将物品放入预定的位置;重复以上任务,直至完成搬运任务。
4 系统实验测试
起重运输机器人组装完成后,开始进行代码调试和结构可行性分析测试,系统实验设计流程如图3所示。起重运输机器人从起始区域出发,分多个部分进行调试,判断代码逻辑是否合理:起重运输机器人从起始区域出发到达取物区;运用灰度传感器进行巡线直到遇到停止线,开启超声波模块,进行物品识别工作;起重运输机器人从取物区,运用丝杆步进电机控制活动升降架实现机械手爪的升降,完成对物品的抓取;机器人行进过程中通过自主路径规划实现避障,到达堆码区,再次运用灰度传感器巡线,开启超声波模块识别是否有物品摆放;确定好摆放位置后,启动丝杆步进电机调节高度,控制机械手爪完成物品按规定方式摆放;重复以上流程,直至完成所有搬运任务,机器人回到起始区域,视为完成任务。在整个任务过程中,调试的重心放在灰度巡线以及升降架与抓取模块设计。
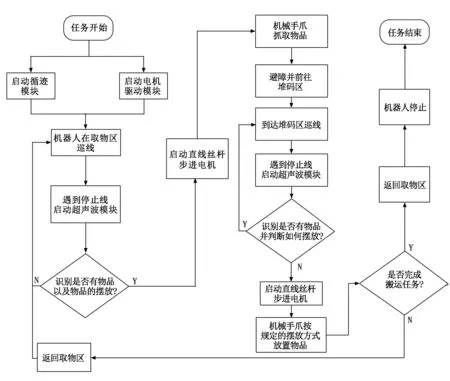
图3 系统实验设计流程图
灰度巡线:起重运输机器人的运动全程依靠灰度传感器的巡线来实现自动定位,通过对赛道上的黑线进行感应来判断机器人是否偏移路径,以保证能精确到达各个区域,同时,灰度传感器体积小、重量轻且方便安装[13]。机器人车架底座安装有3个五路灰度传感器,中间的LED信号指示灯检测到黑线就会熄灭,保证机器人直行;左侧或右侧的LED信号指示灯检测到黑线就会熄灭,证明机器人向左或右偏移,需将整体往右或左侧行驶,才能回到正确行驶路线上;当所有的LED信号指示灯都熄灭时机器人停止。
升降架与抓取模块设计:活动升降架和丝杆步进电机紧固连接,由升降驱动块和驱动丝杆配合完成活动升降架的升降工作。同时,活动升降架上装设悬吊滑轨,悬吊滑轨上设有滑移抓取组件,由滑移驱动机构和机械手爪组合完成,机械手爪采用两个自由度,其末端由两个完全相同的齿轮机构驱动旋转,从而使得手爪在张合时能实现左、右结构对称,对所夹物件产生大小相同的夹持力[14]。此处主要调试舵机参数,在调试过程中出现手爪在抓取物品的过程中提前松开导致物品放置不稳定的情况。经多次检测,发现问题出自于代码程序,修改参数后能精确实现物品的抓取与放置[15]。
5 结束语
本文以提高作业运输的高效率和低成本为出发点,设计了一款以编程开发控制程序的新式起重运输机器人。在结构上,该机器人以铝合金材质为框架,车架下端安装有行走驱动电机和麦克纳姆轮,实现全方位运动;车架底座装设有灰度巡线传感器来进行巡线定位,使机器人能精确完成物品的取件摆放,更好地实现运输工作;底座上端安装有活动升降架,活动升降架上设有悬吊滑轨,悬吊滑轨上装设的滑移抓取组件能更好地实现悬吊起重运输。该机器人结构设计新颖、智能化水平高。
嵌入式系统是核心的控制系统,在多种硬件和软件的组成配合下实现了物品运输过程中的实时控制和监测。自主控制系统实现了自主导航、路线循迹和避障等功能,提高了机器人的灵活性、高速度和高效率。机器人结合了Arduino嵌入式系统开发工具,高质量地保证了物品运输过程中各项功能的实现。
该新式起重运输机器人可保证在稳定抓取放置物品的同时拥有较高的运行效率,投入成本低,能满足现代制造行业的需求,达到了自动化物流搬运的目的,为智能工厂的柔性化生产提供了解决方案。
