采用MATLAB中的SISO工具设计PID控制系统*
2024-01-03杨通培陈溪奉
杨通培,陈溪奉
(中国航发贵州红林航空动力控制科技有限公司,贵州 贵阳 550009)
0 引言
MATLAB的Control System工具箱提供了单输入单输出系统补偿器的设计工具SISO Tool(Single Input Single Output Toolbox),新版软件的工具箱能利用系统零极点改变根轨迹图或开环系统的伯德图,实现控制系统补偿器的设计,包括具有自动整定功能的PID校正、最优化校正、线性二次高斯控制器设计、回路成形法、内模控制校正等。在设计补偿器时也可以设置约束条件,如阻尼比、自然频率、超调量、幅值和相位裕度等,设计后还可实时显示补偿后闭环系统的阶跃响应和频率特性等。本文介绍采用SISO Tool工具箱高效完成控制系统PID校正的方法,为控制系统校正设计提供了强有力的辅助手段。
1 PID控制
从1936年PID控制器问世至今已有近90年历史,其以结构简单、稳定性好、工作可靠、调整方便成为工业控制的主要技术。PID控制是一种串联线性控制器[1],控制规律为:
(1)
其中:G(s)为PID控制器传递函数;U(s)、E(s)分别为PID控制器输出、输入;Kp、Ki、Kd分别为比例、积分、微分系数。
其核心在于PID参数的确定。1942年Ziegler& Nichols引入了调谐规则以设置 PID的合适参数;1950年中期工程整定PID在工业中得到广泛应用。现在可以直接利用SISO工具设计控制器参数,进行设计仿真为工程应用提供基础。PID控制系统结构框图如图1所示,图1(a)中,r(t)、y(t)分别为控制系统输入、输出,e(t)、u(t)分别为PID控制器输入、输出;图1(b)中,C(s)、G(s)、H(s)和F(s)分为校正装置、被控对象、传感器和滤波器的数学模型。
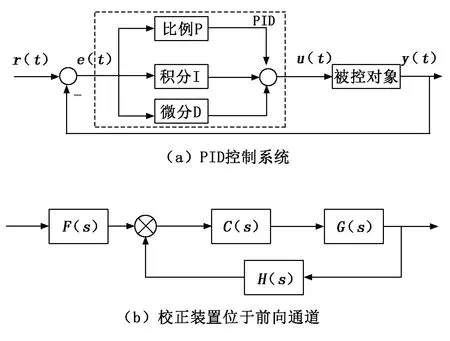
图1 PID控制系统结构框图
2 SISO设计工具
2.1 SISO简介
SISO设计工具可以设计校正装置位于前向通道、按输入补偿的复合校正、校正装置位于反馈通道、校正装置位于局部回路和具有内反馈回路的校正系统等五种类型[2];可用于根轨迹法改善闭环系统的动态特性,改变开环系统Bode图的形状,添加校正装置的零点和极点,添加及调整超前/滞后网络和滤波器,检验闭环系统响应,调整相位及幅值裕度,实现连续时间模型和离散时间模型之间的转换等。
2.2 工作界面
2.2.1 初始界面
初始界面为Control System Designer,如图2所示。
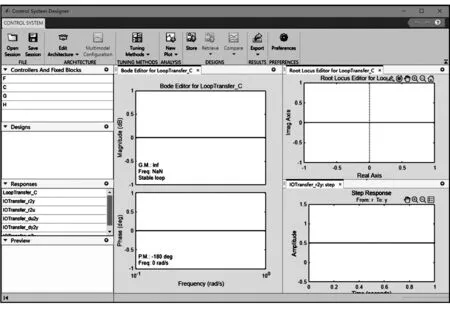
图2 控制系统设计界面
2.2.2 Control System选项卡
(1) File菜单卡有Open Session和Save Session两个工具。
(2) Architecture菜单有Edit Architecture和Multimodel Configuration两个工具。点击Edit Architecture图标以选择合适的模型结构,导入模型data;点击Select Control Architecture中五种模型可选择模型结构;在Blocks页导入结构图中相应环节的参数值;在Loop Signs页设置控制系统正或负反馈符号。
(3) Tuning Methods菜单卡分为Graphical Tuning和Automated Tuning两种方式。Graphical Tuning中有波特图、闭环波特图、根轨迹、尼科尔斯曲线编辑器,用于控制要显示的图像。Automated Tuning中点击可选PID Tuning、Optimization Based Tuning、LQG Design、Loop Shaping、Internal Model Control Tuning之一,可获得相应的校正方法设计界面,选择校正参数,同步参数的变化,可以在一个窗口中显示多种类型的图形,设计工作在所显示的图形上完成。
(4) Analysis菜单中有NewPlot选项,控制系统参数变化后可选择重新绘制阶跃响应、伯德图、脉冲响应、零极点图等显示系统响应的曲线。
(5) Designs菜单中有Store、Retrieve和Compare功能,处理修改模块参数后的设计结果。
(6) Results菜单有两个选项:Export Tuned Blocks将调整的框图值输送到工作空间;Create Simulink Model用调整的框图值创建Simulink模型。
2.2.3 Bode图和根轨迹编辑器界面
在图2控制系统设计界面中可直接拖动Bode图中的对数频率特性曲线(根轨迹图和阶跃响应曲线会同步变化)得到理想的特性[3],也可在图中增加零极点来改善系统性能。
3 PID控制系统设计实例
某航空电磁阀控制系统为单位负反馈系统,电磁阀数学模型为G(s)=1/(s2+s),利用SISO Tool设计PID控制器,要求调节时间小于6 s,超调量小于5%。
3.1 建立被控系统模型
建立被控系统模型的代码如下:
num=[1]
den=[1 1 0]
G=tf(num,den)
G1=feedback(G,1)
3.2 打开SISO设计工具窗口
打开SISO设计工具窗口命令如下:
>>sisotool
运行后,点击Control System中Architecture;再将G1模型数据从工作空间导入系统;点击OK,可得到系统的Bode图、根轨迹和阶跃响应曲线,如图3所示。此时控制器参数为C=1,对电磁阀而言,超调量和调节时间都偏大,故必须设计控制器提高系统性能[4],这里采用PID来改善控制效果。
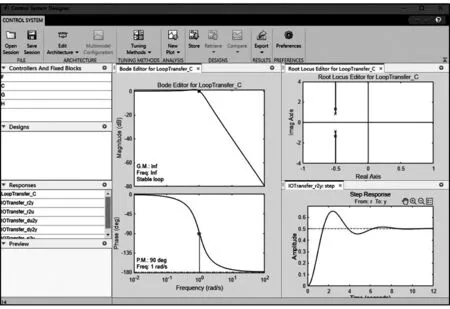
图3 系统的各类性能曲线
3.3 设计PID控制器
选择图3中Tuning Methods菜单下的Automated Tuning中的PID Tuning打开设计界面,如图4所示。其中Select Loop to Tune表示在所选调优方法对话框中的补偿器部分中选择要调优的补偿器和循环;点击Add new loop用补偿器编辑器指定补偿器结构,在开环传递功能对话框(见图5)中,选择信号和环路开口,配置环路传递功能,创建一个要调优的新环路。
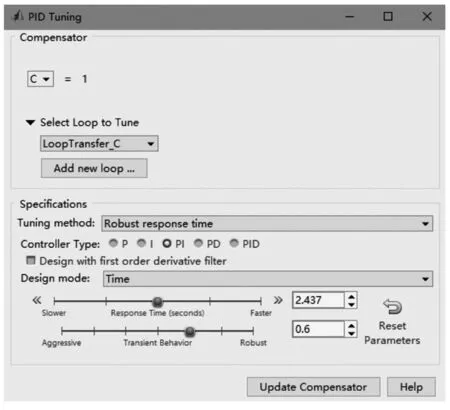
图4 PID Tuning界面
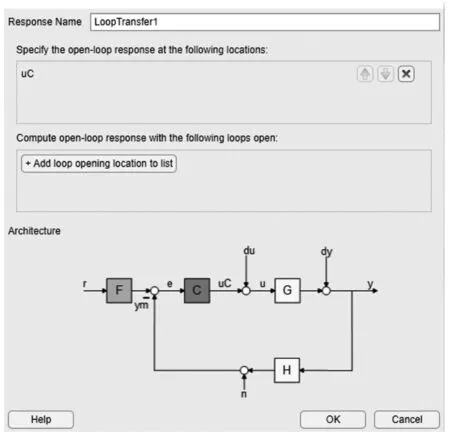
图5 Open-loop Transfer Function界面
在图4中的Specifications中可以设置调节方式:
(1) Robust Response Time。用鲁棒响应时间算法自动调整PID参数可平衡性能和鲁棒性,该方法可调整任何类型系统的PID参数,步骤为:①在Specifications的调优方法下拉列表中选择鲁棒响应时间;②选择P、I、PI、PD或PID控制器类型,控制器中加入微分会使算法具有更大的自由度,可获得足够的相位裕度和更快的响应时间;③在Design下拉列表中二选一,可选择的参数如图6所示,Frequency模式下的标尺调节参数如图7所示;④单击Update Compensator将设计的控制器应用于系统的补偿器。
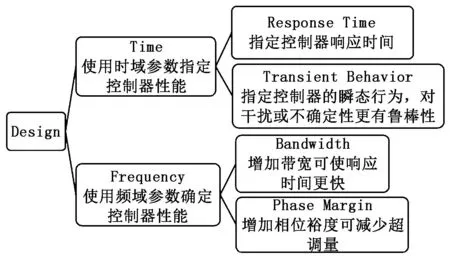
图6 可通过标尺调节的参数
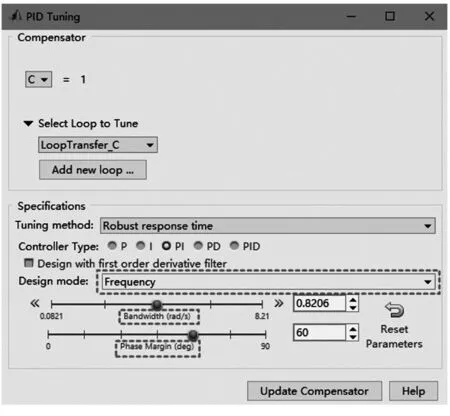
图7 标尺调节Bandwidth和Phase Margin
(2) Classical Design Formulas。用经典的PID设计公式来调整控制器参数,如图8所示。

图8 经典的设计公式
在图8中计算PID参数的Formula分别为:
Approximate MIGO frequency response使用闭环、频域、近似m约束积分增益优化计算参数;
Chien-Hrones-Reswick将被控对象近似为带有时滞的一阶模型,采用Chien-Hrones-Reswick算法查表计算参数;
Skogestad IMC将被测对象近似为带有时间延迟的一阶模型,使用Skogestad设计规则计算参数;
Ziegler-Nichols frequency response根据系统的最终增益和频率,由Ziegler-Nichols查表计算参数;
Ziegler-Nichols step response将被测对象近似为带有时滞的一阶模型,使用Ziegler-Nichols设计方法计算参数。
本例选Robust Response Time,采用PID控制方式,相关参数设置及控制器模型如图9所示,系统性能曲线如图10所示。
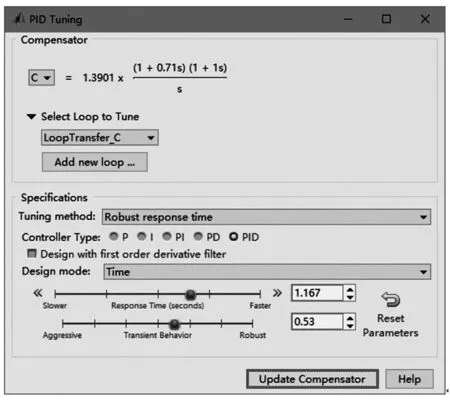
图9 相关参数设置及控制器模型
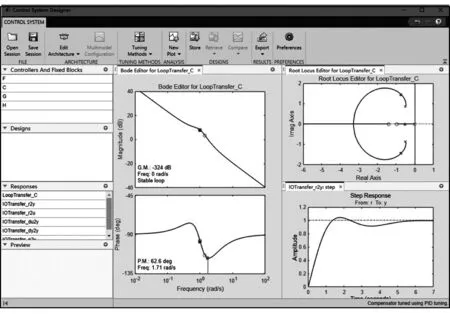
图10 PID控制系统性能曲线
4 结论
利用SISO系统设计工具箱中PID参数的自整定功能,通过综合参数的调整,实时获得响应曲线,判断是否满足设计要求;对系统性能分析和校正都十分方便。
