混合磁悬浮平台的零功率特性分析*
2024-01-03张晓友尚利冬金俊杰徐方超
张晓友,尚利冬,赵 川,孙 凤,金俊杰,徐方超
(1.沈阳工业大学 机械工程学院,辽宁 沈阳 110870;2.日本工业大学 机械工学科,日本 琦玉 3458501)
0 引言
混合磁悬浮系统通过改变悬浮气隙和线圈电流的大小调节磁力大小使悬浮物进行上下移动,通过零功率控制器的调节,使电磁线圈中的电流趋于零,有效降低了系统功耗[1,2]。
孙凤、赵川等[3,4]利用伺服电机旋转径向磁化的圆柱形永磁体改变磁路中的磁通量,采用积分分离法进行分段控制,有效降低了系统的稳态误差,提升了系统的响应时间。国防科技大学杨祚唐等[5]所设计的零功率控制器可实现变负载条件下的稳定悬浮并保持较优的悬浮性能。王韬宇等[6]提出一种五自由度磁力驱动平台,系统在PID控制下具有较好的响应特性,能够实现稳定悬浮。
为降低系统的悬浮功耗,本文提出了一种混合磁悬浮平台,采用三组混合电磁铁对悬浮盘进行悬浮,根据磁力数学模型,通过对悬浮盘进行受力分析,进一步建立系统的动力学方程,设计了零功率控制器,采用PD控制进行零功率仿真分析,证明了系统能够稳定悬浮,并实现零功率控制。
1 混合磁悬浮平台结构与工作原理
本文中混合电磁铁采用U型结构,永磁铁安装在铁芯中部,其优点是易于安装,不容易与悬浮物发生吸死导致永磁铁破坏,结构如图1(a)所示。图1(b)为混合磁悬浮系统的结构图,混合磁悬浮系统由顶板、底板、三组混合电磁铁、悬浮板、伺服电机和激光位移传感器等组成。顶板和底板通过4根光轴进行连接,构成平台的基本框架,顶板上安装环形导轨,大齿轮安装在顶板上与环形导轨同轴,磁极1、2与伺服电机连接并安装在导轨上,伺服电机轴端安装小齿轮与大齿轮啮合凭借伺服电机驱动进行旋转。三组混合磁铁采用120°均匀布置,并与固定在悬浮铝盘底面的磁化目标形成闭合回路提供悬浮力,通过底端的三组激光位移传感器可对悬浮气隙进行监测。
2 系统动力学方程
根据磁力表达式经过线性化处理后,混合电磁铁的磁力与电流和气隙的关系式可表示为:
(1)
其中:F0为磁力;i、z分别为电流和气隙;k为悬浮力系数,k=66.9 N(mm2)/A2;a为电流偏置量,为5.27;b为气隙补偿值,为3.44。
对悬浮平台进行受力分析,如图2所示,三个磁极的磁力分别为F1、F2、F3,悬浮盘所受重力为mg,施加重物的重力为mLg也即外扰力fd,其中(xL,yL)为施加重物的坐标位置,α为绕X轴的角位移,β为绕Y轴转动的角位移,θ1、θ2为相邻磁极安装角度,初始值为120°。
根据牛顿第二定律,悬浮盘在竖直方向的力学方程为:
(2)

ΔF=-kz(z′-z0)+ki(i′-i0)=kzz+kii.
(3)
其中:z′和i′分别为任意时刻的气隙和电流;kz为气隙刚度;ki为电流刚度,计算如下:
(4)
建立悬浮平台的动力学模型如式(5)所示,系统稳定悬浮应满足力和转矩平衡,即:
(5)

根据式(5)所建立的动力学微分方程,建立如下状态空间模型:
(6)
其中:x为状态变量;u、y分别为输入和输出。式(6)中各个量的具体表达式如下:
y=[z1z2z3]T.
C=TT[I3×303×3].

3 零功率控制器设计
本文主要将电流积分加到气隙的参考输入上来实现零功率控制,气隙的目标值ztar(t)为:
(7)
其中:zref为气隙参考值。三个混合电磁铁气隙均采用PD控制器,经过PD控制器将气隙转化为电流信号作为输出控制信号,通过改变线圈电流大小来改变悬浮力大小,进一步实现对气隙调节。根据所建立的系统动力学模型,被控对象以三个磁极的线圈电流为输入,以位移和角位移为输出,通过对悬浮盘的几何分析,根据转换矩阵T计算得到三个磁极的气隙值。PD控制器如下所示:
(8)
其中:u(t)为控制器的输出;Kp为比例反馈增益;Kd为微分反馈增益。图3为电流积分反馈的零功率控制器框图,Kc为电流积分反馈系数。根据目标气隙的大小,在每一个气隙处分别采用比例微分控制器,通过调节Kp、Kd参数来实现悬浮。
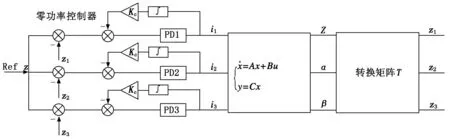
图3 基于PD的零功率仿真框图
4 仿真与分析
根据上节所建立的PD零功率控制器,控制器参数为Kp1=6 300,Kd1=42,Kp2=2 870,Kd2=21,Kp3=3 000,Kd3=21,Kc1=0.045,Kc2=0.08,Kc3=0.081。其中在悬浮盘中心加载0.2 kg重物,动力学方程是针对平衡点进行线性化的,将平衡位置设定为0位置,加载示意如图4所示,仿真结果如图5所示。
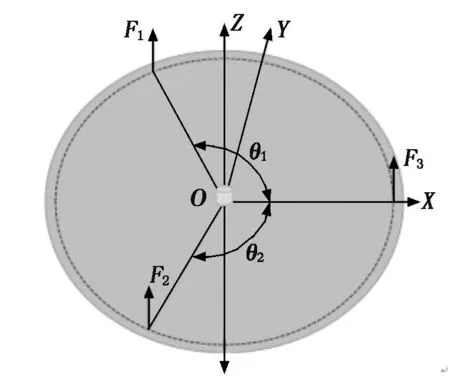
图4 悬浮盘中心位置加载示意图
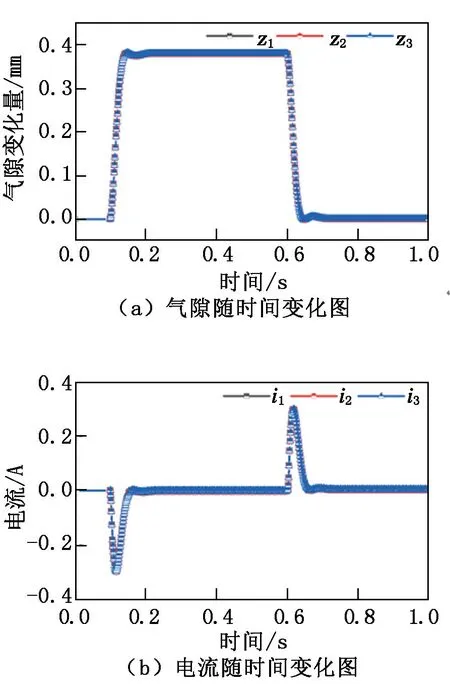
图5 中心加载条件下气隙和电流随时间的变化
在悬浮盘中心加载,气隙在稳定悬浮状态下,由于悬浮物质量发生了变化,通过减小悬浮气隙来增大磁力进行悬浮。悬浮盘向上运动为气隙减小方向,线圈中通入反向电流时,磁路中磁动势随电流的增大而增大;当线圈通入正向电流时,磁路中磁动势随电流的增大而减小。
图5中,悬浮盘首先处于平衡位置,在0.1 s处进行中心加载,悬浮物重力大于三个磁极的合磁力,电磁线圈通入反向电流增大磁力,此时电流减小大约0.3 A,悬浮盘将向上运动且气隙减小了0.38 mm,通过电磁线圈中电流不断调节,悬浮间隙能够迅速到达新的平衡位置,调节时间约为0.1 s,此时电磁线圈中电流趋于零实现零功率控制。在0.6 s处进行减载,悬浮物质量相比之前要变小,此时磁力合力大于悬浮盘重力,通过增大线圈电流来减小磁力并间接改变悬浮气隙,经过线圈电流的不断调节,最终使得磁力等于重力,电磁线圈中电流趋于零,悬浮气隙又恢复到系统未加载的平衡位置,实现零功率控制。
在图6中,以固定磁极所在直线为X轴,在悬浮盘45°方向、半径0.15 m位置加载0.2 kg重物,根据混合磁悬浮系统的动力学模型,进行了零功率控制仿真,加偏载时气隙电流变化如图7所示。
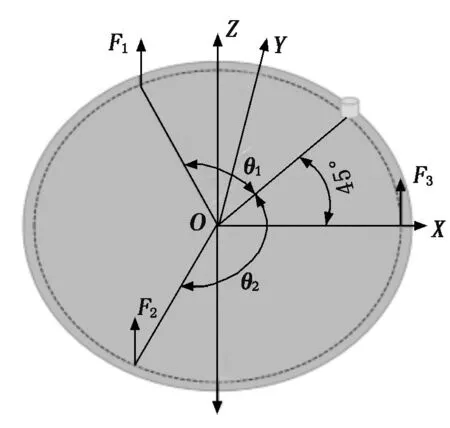
图6 悬浮盘其他位置加载示意图
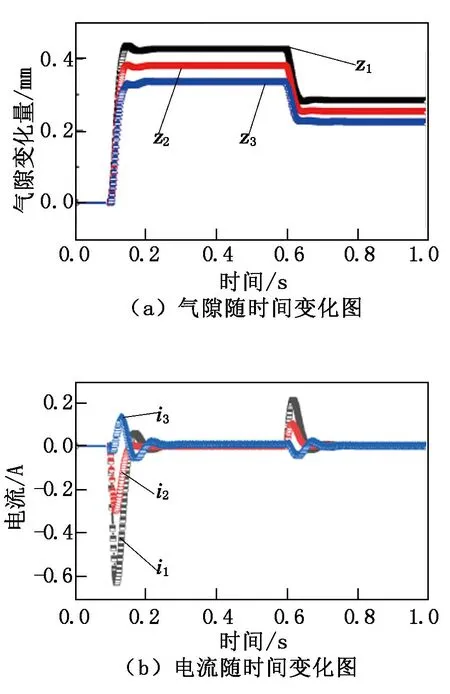
图7 偏载条件下气隙和电流随时间的变化
在图7中,悬浮盘首先处于平衡位置,在0.1 s处施加偏载,悬浮物重力大于三个磁极所提供的磁力,此时三个磁极的电磁线圈通入反向电流,悬浮盘整体向上运动来减小悬浮气隙,通过电流调节三个磁极的合磁力去平衡悬浮盘重力,系统稳定时三个磁极的悬浮气隙出现差异,磁极1气隙变化量为0.426 mm,磁极2气隙变化量为0.381 mm,磁极3气隙变化量为0.334 mm,悬浮盘在偏载外扰的作用下发生倾斜,从原平衡状态达到新平衡状态的调节时间为0.14 s,且三个磁极的电磁线圈电流趋于零,实现零功率控制。在0.6 s处进行减载,悬浮物重力又一次发生变化,此时三个磁极的合磁力大于悬浮盘重力,悬浮盘向下运动增大悬浮气隙来减小磁力。通过电磁线圈中电流的动态调节,系统稳定悬浮时相对初始位置磁极1气隙变化量为0.286 mm,磁极2气隙变化量为0.257 mm,磁极3气隙变化量为0.225 mm,悬浮盘呈倾斜状态悬浮,各磁极的电磁线圈中电流趋于零,实现零功率控制。
5 结论
本文针对混合磁悬浮系统进行了研究,提出零功率控制策略并建立了相关的数学模型,设计了零功率控制器,对所设计的控制器进行仿真分析,通过在不同位置加载,分析气隙和电流的变化。仿真结果表明:
(1) 在悬浮平台的中心加载,系统稳定后各磁极的气隙相同,各个磁极气隙变化量为0.38 mm,减载后系统达到稳定悬浮状态后,各磁极的稳态电流趋于零,实现零功率控制。
(2) 当施加偏载后,平台发生倾斜,零功率状态下各磁极气隙出现差异。通过加减载后系统达到新的稳定状态,磁极1气隙变化量为0.286 mm,磁极2气隙变化量为0.257 mm,磁极3气隙变化量为0.225 mm,电流调节时间0.14 s,响应时间快,各磁极的稳态电流仍能趋于零,实现零功率控制。
