基于机器视觉的直插式网络变压器PIN脚平整度检测
2024-01-03杨杨,黄菊
杨 杨,黄 菊
(四川职业技术学院 电子工程学院,四川 遂宁 629000)
网络通信技术的不断进步,网络变压器得到了越来越广泛的应用.尤其近年来5G网络的高速发展,网络传输速度越来越快,通信设备也越来越小型化、集成化,且随着5G应用场景大幅增加,客户产品更趋个性化,网络变压器作为通信设备的关键组件,其在形态、样式等方面都将发生很大的改变,例如:网端设备的安装组件更小、更薄,笔记本电脑、游戏机等产品都进一步小型化、低背化.这些变化趋势要求网络变压器也需要进一步地小型化超薄化,恰恰这样的改变给目前生产过程对网络变压器的一些视觉检测提出了更高的要求.目前对网络变压器进行视检时依赖人工检测,这样的检测方法效率低下,人工成本高且容易生产低劣产品.因此在网络高速发展以及工业自动化过程中,逐步实现机器视觉对网络变压器进行视检将是一种趋势,是网络变压器保持高生产量的同时保证品质的关键所在.
在网络变压器趋于小型化的过程中,人工对PIN脚平整度的检测难度越来越大,并且易出现主观性错检.目前机器视觉领域中,深度学习虽然发展迅速[1],同时有许多学习能力强大的CNN网络模型被提出用于检测物品缺陷[2-4],但是神经网络可解释性低,其模型结构复杂、参数居多、算法透明性低导致系统与人的协同工作效果大打折扣[5-6],尽管目前许多研究人员提出了许多方法使得网络模型可以具有一定的解释性,却依旧是当下的难点[6-7],实际应用中神经网络的部署对硬件的要求也相对较高.因此文章针对网络变压器PIN脚平整度的视检,研究一套图像处理的方法,通过机器视觉实现对其高效、自动以及低成本的检测.
1 测量方案设计
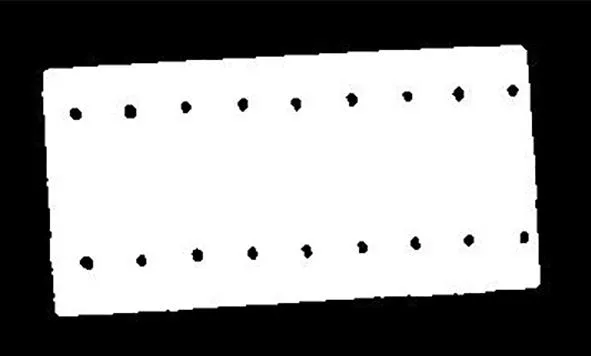
如图1所示,图像测量系统由传送装置、被测网络变压器、PC端/嵌入式系统、相机、红外发信发生器、光源以及遮光容器组成.由于网络变压器的外壳通常为黑色,因此搭建高灰度值(即偏白色)的背景环境增强对比度,以便于获取网络变压器的轮廓,光源及照明方案选择LED和低角度照明.实验使用分辨率1920×1080的CMOS相机获取网络变压器图像,通过棋盘格检测方法获取畸变参数并进行图像的畸变校正[8],最后获得用于测量的网络变压器图像.
技术路线如图2所示,首先进行图像预处理,对获取的网络图像进行空间滤波,过滤CMOS相机拍摄过程中的部分噪声以及保存图像的边缘特征,并且通过阈值分割快速得到信息保存较好的二值图像;然后通过传送带速度、红外发生器记录的时间差计算K值(像素长度与物理长度的比值);最后进行垂直/水平投影并分析其统计结果得到PIN脚行(列)间距,通过设置阈值、对比图纸中PIN脚间距得到平整度的检测结果.
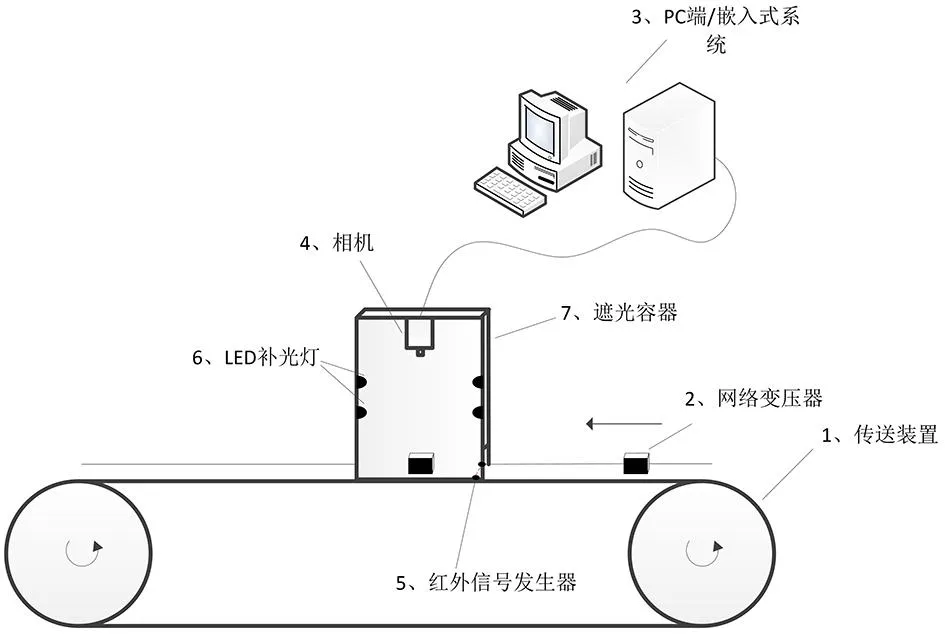
图1 测量系统
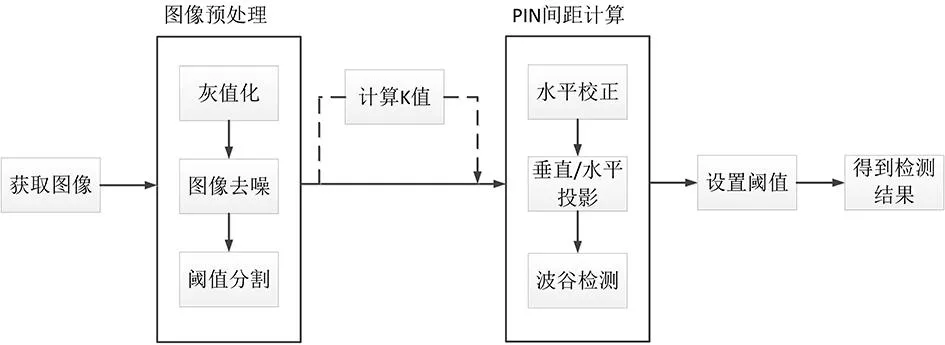
图2 技术路线
2 图像处理
2.1 图像预处理
对网络变压器彩色图像的预处理步骤如下.
(1)灰度化
在对网络变压器PIN脚行(列)间距的计算中,主要对边缘信息进行处理,不需要对图像的色彩信息进行处理.因此对彩色图像进行灰度化,减少图像信息的计算量方便后续的图像处理,结果如图3b所示.
(2)图像去噪
由于CMOS(CCD)相机在接收信号和输出过程中会产生一些不该出现的外来像素即噪声,而网络变压器图像在大部分像素区的灰度值变化平缓,因此文章首先通过中值滤波滤除领域内灰度值突变的噪声点.但由于一些不可知的因素仍然使得网络变压器图像中PIN脚和外壳这些原本灰度值变化极小的区域出现一些多个噪声像素相连的噪声小区域,且无法通过中值滤波滤除.所以在中值滤波后,使用双边滤波[9],突出边缘特征的同时可以很好的抑制上述噪声小区域带来的影响,如图3c所示.
(3)阈值分割
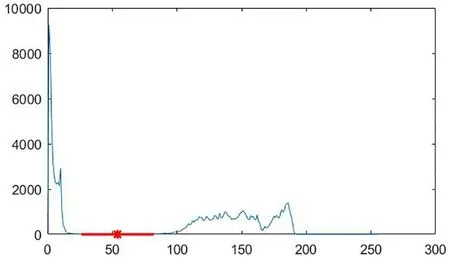
为了得到分割网络变压器外壳与背景、PIN脚的二值图,需要将去噪后的图像进行图像分割.常用的图像分割有Otsu阈值分割[10-11]、聚类分割[12-14]等方法.但实际的使用过程中发现,图像中的阴影会导致Otsu阈值分割效果很差,而聚类分割的效果较好,但其计算量相对阈值分割较大,用于灰度值差距明显的图像分割性价比较低.所以考虑到实际情况,并未使用常用的几种图像分割方法,而根据灰度直方图的统计结果进行阈值分割,如图3g所示.首先为保证后续寻找良好的阈值区段不被噪音影响,对灰度统计结果进行滑动均值滤波;然后根据外壳灰度值集中于低灰度值且背景、PIN脚与外壳的灰度值差较大则中间灰度值统计的像素个数趋近于0的特点,设定像素阈值θ,并在0-100灰度区域段寻找像素个数低于θ的阈值区域段(θ为经验值且文中取θ=20);最后以最宽的阈值区域段的灰度中值β作为分割阈值,如图3g中“*”.文章对比使用Otsu阈值分割、K-means聚类分割,如图3d、3e、3f所示(分割图取反).

(a)原图

(d)Otsu阈值分割

(b)灰度图

(e)k-means聚类分割
(c)滤波图
(f)文章阈值分割
(g)阈值寻找
2.2 计算K值
为后续求取间距等长度参数与图纸规定长度对比,需要求得K值(像素长度与物理长度的比值).如图4a所示,通过获取网络变压器前后端通过红外发生器时间的时间差以及传送带速度,可计算得到网络变压器沿传送方向的物理长度.如图4b所示,再通过图像预处理之后的网络变压器图像垂直投影,可获得网络变压器沿传送方向的像素长度.K值计算如式(1)所示.
(1)
其中t1为前端过红外发生器时间,t2为后端过红外发生器时间,v为传送带速度,Lr为物理长度,Lp为像素长度其中,Lp由图4b得到.

(a)时间差示意图
2.3 PIN脚间距计算
(1)图像水平校正
为了使得网络变压器图像的垂直/水平投影结果能够反映PIN脚的平整度与计算间距,需要将图像中网络变压器部分呈水平放置.因此首先使用Hough变换检测网络变压器的最长边,然后得到最长边与水平线的夹角并进行图像旋转,如图5a、5b所示.
(2)垂直/水平投影
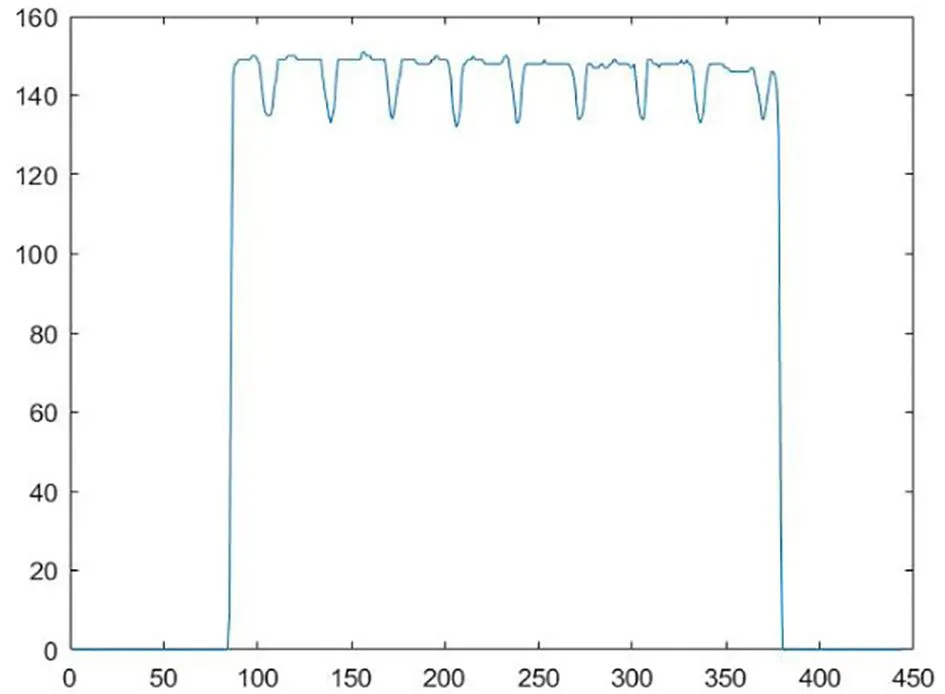
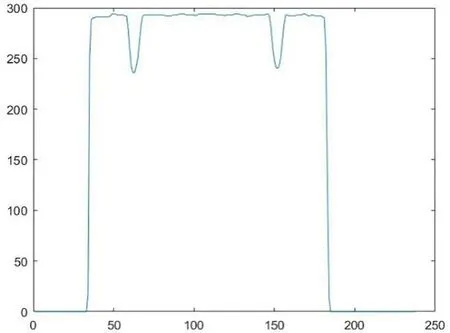
对校正后的图像进行垂直/水平投影,如图5c、5d所示,垂直投影统计结果中波谷位置可以反映PIN脚在水平方向的间距,水平投影统计结果中波谷位置可以反映PIN脚在垂直方向的间距.

(b)图像旋转
(c)垂直投影
(d)水平投影
(3)波谷检测
为了得到PIN脚的间距长度,需要检测垂直/水平投影波形图的波谷位置.但由于PIN脚出现偏斜或光照不均匀等情况,使得出现影响波谷检测的伪谷,因此通过一种伪波谷排除检测方法有效地对波谷位置进行检测.首先使用滑动平均滤波对波形进行一定的平滑,因为在PIN脚处整体的波谷明显,所以受到的影响很小,而对于其他部分具有很好的平滑作用,但窗口大小不宜选择过大,以免造成PIN脚处波谷的明显偏移,文中使用滑动滤波窗口大小W=5.然后进行传统的波谷检测,计算如式(2)所示.
(2)
L为图像像素长度,y(k)为水平方向上k列上统计的像素个数.当满足式(2),k、y(k)即为波谷位置坐标.得到所有的波谷后进行第一轮的伪波谷筛除,以PIN脚半径d作为领域半径,计算如式(3)所示.
(3)
k1为筛选出来的波谷横坐标,df为PIN脚像素半径长度.满足式(3)的波谷为待定波谷,否则判定为伪波谷筛除.第一轮伪波筛出后,进行第二轮伪波筛出,计算每个待定波谷y(k)与最大值M的绝对值,所有求得的绝对值求平均得到平均值T,若待定波谷与最大值的绝对值小于f*T则判定为伪波进行排除,这里f为经验值,文章选用f=0.3,具体计算如式(4)所示.
(4)
k2为第一轮筛选后待定波谷的横坐标,e(x)为y(x)与最大值的差值,E为差值均值,当波谷满足式(4)则为最后的真波谷,否则判定为伪波谷筛除.由上述得到真波谷的各个横坐标,用于计算PIN脚的间距,检测结果如图6所示.
3 PIN脚平整度检测及分析
检测到真波谷的位置坐标后,则相邻波谷横坐标的差值即为检测的PIN脚中心间的像素间距.因此首先计算波谷数量与PIN脚纵(列)数是否相等,然后通过计算得到的间距与图纸要求的PIN脚间距进行比较,最后得出对PIN脚平整度的检测结果,具体计算如式(5)所示.
(5)
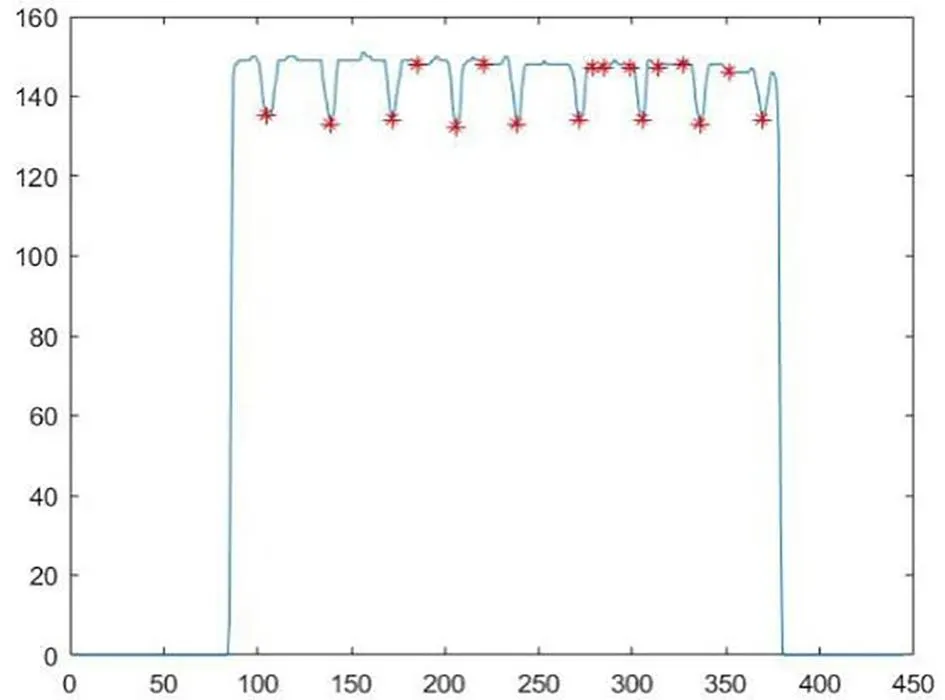
(a)波谷检测


其中Dr为物理间距长度,D1为像素间距长度,εr为物理误差阈值,ε为像素误差阈值,np为网络变压器纵(列)数,nb为波谷个数.若组PIN脚间距满足式(5)则该网络变压器PIN脚平整度检测合格,反之某一组PIN脚间间距不满足式(5),则该网络变压器的这一组PIN脚出现有歪斜或间距尺寸不合格等情况.为了检测文中所述方法所测量长度与实际物理长度之间误差大小,文章使用该方法测量三组已知长度的手写线段以及一个网络变压器中任意3组水平间距和垂直间距,由于歪斜的PIN脚间距使用游标卡尺这样的仪器无法较好地得到测量结果,因此被测量的网络变压器PIN脚经过调整PIN脚平整度十分良好,测量对比结果如表1所示,其中网络变压器PIN脚直径为0.5mm.
由表1可以看出文中测量方法对手写线段的绝对误差较大,这是由于在图像水平校正时手写线段无法保持匀称导致线段并未达到一个良好的水平状态,从而影响到垂直投影反映的测量结果.对网络变压器PIN脚水平间距测量的绝对误差较小,垂直间距测量的绝对误差稍大,主要原因在于文中测量方法是通过评价行与行(列与列)之间的间距从而反映整体的平整度.而在测量垂直间距时,每一行的PIN脚数较多,其中一个PIN脚轻微的倾斜对于游标卡尺并不敏感,但对于图像识别的方法却十分敏感.
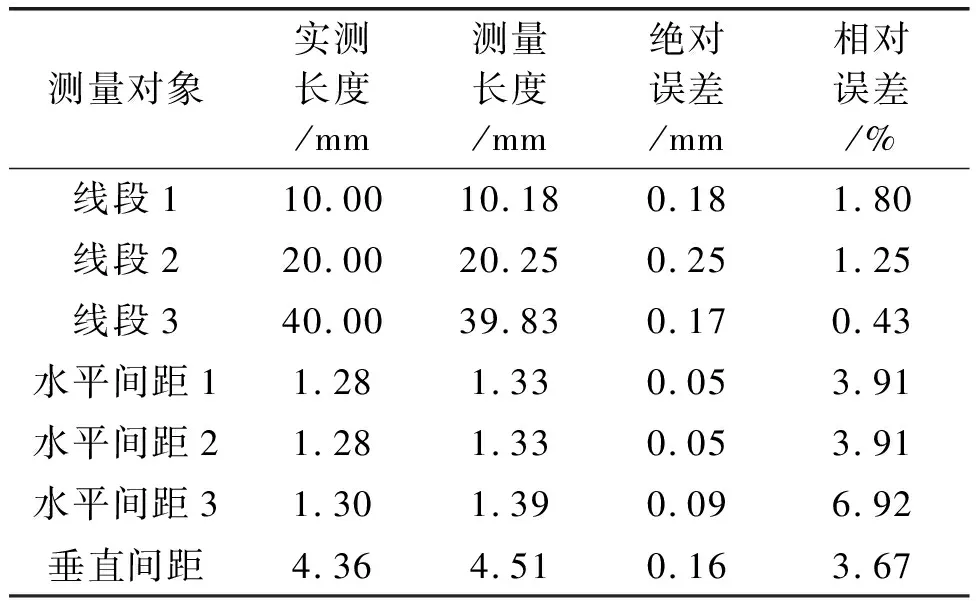
表1 测量误差
4 结论
文中针对直插型网络变压器的特点提出了一套网络变压器PIN脚平整度的检测方法.在图像预处理中根据网络变压器的灰度直方图特点,进行良好的阈值分割;通过垂直投影结合传送带速度计算K值(物理长度与像素长度的比值);通过分析垂直/水平投影结果测量PIN脚水平/垂直间距,检测PIN脚是否有倾斜或间距尺寸不符等情况.通过0.02mm精度游标卡尺测量,验证文中方法的测量精度,对手写线段的平均绝对误差为0.2mm,对PIN脚间距的平均绝对误差约为0.09mm、平均相对误差为4.6%,可以对PIN脚的平整度进行一个良好的检测,具有较好的应用场景和借鉴意义.存在的不足之处,对手写线段的测量反映了在对图像水平校正时方法的鲁棒性还有所欠缺,在网络变压的阈值分割时对背景有一定的限制.在后续的相关研究中,如何提高整套方法的鲁棒性以及减少对背景的限制是进一步研究的突破点.