基于S7-1500PLC的电梯控制系统设计
2024-01-03朱文华左懿
朱文华,左懿
(上海第二工业大学 工程训练中心,上海 201209)
0 引言
电梯是高层建筑中常见的运输工具,其主要功能为人员和货物的运输。电梯系统的逻辑控制比较复杂,所以电梯控制器的选择对其性能的影响就显得尤为重要。传统电梯的控制器大多数为继电器。由于继电器存在控制点多、接线复杂、故障多、不稳定等问题,逐步被可靠性强、性价比高、编程及维护方便的PLC所取代[1]。
S7-1500PLC是西门子公司生产的一款模块化控制器,广泛应用于离散自动化领域。该控制器凭借其模块化,简易的分布式结构以及无风扇的设计,成为工业控制中最热门的解决方案之一[2]。与S7-300PLC相比,同价位S7-1500PLC的位性能(ns级)反应更快,安全保护机制更全面。而且,因其具有信息安全集成机制,S7-1500PLC不仅能提高系统安全性,还能增强系统的可用性。总之,S7-1500PLC相较于S7-300PLC性能更强,安全性更好,性价比更高。
本文所述系统采用西门子S7-1500PLC为控制器,通过TIA Portal软件完成系统的硬件组态、程序设计、HMI设计,同时基于PROFINET工业通信标准,完成上位机与电梯系统的数据通信[3],实现对本电梯系统运行状态的实时监控与数据监测。
1 电梯结构及工作原理
1.1 电梯结构
如图1所示,本文介绍的电梯装配的是永磁同步曳引机,配备轿厢,且在两根竖直刚性导轨间运行的垂直电梯。

图1 单部6层电梯结构示意图
1.2 工作原理
电梯是集机械、电气、自动控制等技术为一体的智能运输设备,主要由电气控制系统、电力拖动系统、曳引系统、质量平衡系统、导向系统、轿厢系统、门系统以及安全保护系统八大部分组成[4]。
通常将曳引绳缠绕于曳引轮和引导轮上,轿厢和对重分别固定于曳引绳两端,以曳引电动机为动力带动曳引轮转动,通过绳与轮之间摩擦产生的牵引力实现轿厢的上、下行[5],进而达到运输目的。
2 电梯系统硬件设计
2.1 硬件系统组成
本系统采用西门子1500系列1513-1PN带显示屏的CPU模块,它内部存储器最大可存储300 KB代码和1.5 MB数据,而且其位指令执行时间也仅为40 ns,并具有四级防护机制。同时,该CPU还支持OPC UA服务器数据访问等功能。本文电梯运行系统所选CPU固件版本为V2.5。
2.2 PLC的I/O分配
电梯的输入信号主要包括外呼梯信号和内选层信号,输出信号主要包括外呼梯指示灯和梯内选层指示灯等,PLC的I/O分配如表1所示。

表1 单部6层电梯仿真对象I/O表
2.3 系统HMI选型
本系统上位机采用西门子TP1200精智面板,具体参数为:12.1″ TFT显示屏,1 280×800像素,16 M色。该面板有一个MPI/PROFIBUS DP接口和两个PROFINET/工业以太网接口。系统以它作为监视与控制系统的载体,实现上位机与用户之间的人机交互。
该设计充分体现了离散控制“集中操作、分开控制”的核心思想。在系统运行过程中,该触摸屏采用PROFINET通信标准与西门子1500系列1513-1PN CPU模块进行通信,实现全程监控、信息记录、紧急报警以及人为过程控制等功能。
3 电梯系统软件设计
梯形图(LAD)是PLC编程中最常用的编程语言之一。它与继电器线路类似,因此对于电气从业人员,具有很强的直观性[6]。本系统使用梯形图完成程序编写设计,由于电梯控制逻辑比较复杂,所以在程序设计时必须充分考虑。例如,电梯上行、电梯下行、电梯开关门、外呼、内呼等,确保电梯功能完善,下面对该系统主要程序进行分析介绍。
3.1 系统初始化
系统初始化楼层设计为1楼,所以当PLC得电启动后,程序将10赋值给变量“电梯轿厢高度”,与此同时“1层上行指示灯”得电复位,“启动中”指示灯得电复位,“停止中”指示灯得电置位,即电梯来到1楼后保持静止并等待响应,程序如图2所示。

图2 系统初始化程序
3.2 电梯顺序运行
该电梯控制逻辑为顺序控制,即遵循由下至上,再由上至下的总体原则。当电梯得电运行,每完成一次响应后可停在当前楼层,并且可再次迅速响应外呼请求,即当其他楼层有呼梯请求时,能够保证及时响应。基于顺序控制的运行逻辑,该电梯不会响应与运行方向相反的呼梯请求,这在一定程度上提高了电梯的响应效率,尤其在多部电梯群控系统中体现更为明显。
如图3所示,电梯初始位置在1楼,当按下1层上外呼时,“1层上行指示灯”得电,则“1层开关门”得电置位,“1层上行指示灯”得电复位,电梯开门。当完成开门指令,“电梯开关门结束”触点得电,此时若乘客在轿厢按下内呼按钮,程序则跳转到下一步号,即“顺序步号1”得电置位,同时“顺序步号0”得电复位,“电梯上行”得电置位,电梯响应内呼请求,向上运行。另外,当1楼没有呼梯而其他楼层有请求时,程序直接使“顺序步号1”得电置位,同时“顺序步号0”得电复位,“电梯上行”得电置位,即电梯响应外呼请求,向上运行。

图3 电梯顺序运行程序
3.3 电梯开关门
本电梯系统开关门程序基于HMI仿真进行设计,利用SIMATIC WinCC完成HMI设计与监控环境组态[7]。
如图4所示,以本电梯系统1楼为例,在触摸屏上所设置的“电梯门位置变量”最大值为4,当“1层开关门”得电闭合时,通过系统1Hz时钟让电梯门位置每1 s移动1个单位,当电梯门位置等于4时,“顺序步号12”得电置位,即程序跳转到下一程序段,1楼电梯门开,与此同时“1层开关门”得电复位。当电梯门完全打开后,同样使用1Hz时钟使电梯门以每秒1个单位的速度关门,当电梯门位置变量等于0时,使得“顺序步号12”得电复位,“电梯开关门结束”得电置位,即完成1楼电梯关门。此时,“电梯开关门结束”得电置位,通过接通延时定时器,2 s后“电梯开关门结束”得电复位,即使得“电梯开关门结束”保持2 s得电,给乘客留有按内呼按钮的时间。
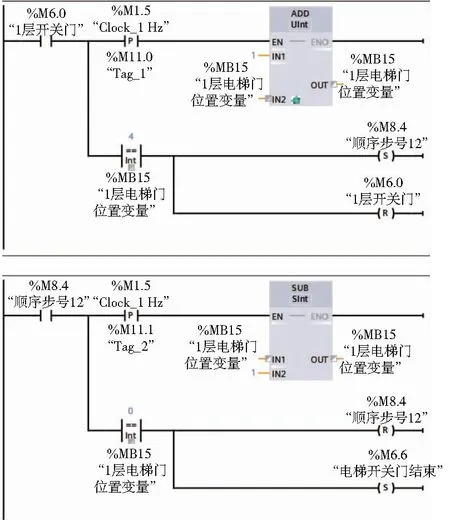
图4 电梯1层开、关门程序
3.4 电梯上、下行
由于在触摸屏上进行电梯仿真所需的I/O点比实际更加复杂,而在HMI中无法模拟实际电梯的传感器,所以在本系统中采用一个变量控制一个标尺(棒图),标尺连着电梯的轿厢,依靠该标尺用触点比较指令来模拟电梯的上、下行,即用一个整型变量控制HMI中图块位置进而实现仿真动画。
本电梯仿真模型设计共6层,将“电梯轿厢高度”定义为一个整型数据,采用W字存储器进行数据存储。上行启动:当上行启动常开触点闭合,使用5Hz的系统时钟脉冲对“电梯轿厢高度”存储器进行加1操作,即每秒“电梯轿厢高度”数值加5,电梯轿厢图形在HMI画面中移动关联变量为“电梯轿厢高度”,关联变量区间为0~60单位,因此,在仿真画面中电梯轿厢从1楼到达6楼的时间为12 s。
所以,当“电梯上行”触点得电闭合,且“电梯轿厢高度”不超过60,那么通过系统5Hz时钟,使电梯以每秒5个单位的速度自增,即电梯向上运行。当“电梯下行”触点得电闭合,且“电梯轿厢高度”不低于10,那么通过系统5Hz时钟,使电梯以每秒5个单位的速度自减,即向下运行,程序如图5所示。

图5 电梯上、下行程序
3.5 楼层指示
为了便于乘客观察电梯所在楼层,设计了电梯楼层显示功能。如图6所示,对“电梯轿厢高度”存储器进行除法运算,“Always TRUE”是西门子PLC在系统运行过程中一直处于闭合状态的监视触点,通过它对DIV除法运算数据块进行除法运算,将“电梯轿厢高度”除以10,其结果输出给“电梯楼层数”寄存器,从而在触摸屏上实现电梯楼层数的显示。

图6 电梯楼层指示程序
4 电梯系统仿真设计
通过西门子WinCC组态软件进行HMI(人机交互画面)设计,实现电梯系统仿真与运行状态实时监控。如图7所示。利用WinCC组态软件内的基本元素进行电梯模型设计,主要包括电梯仿真模型、电梯外呼梯按钮、轿厢内部选层按钮以及电梯运行状态指示等基本信息。
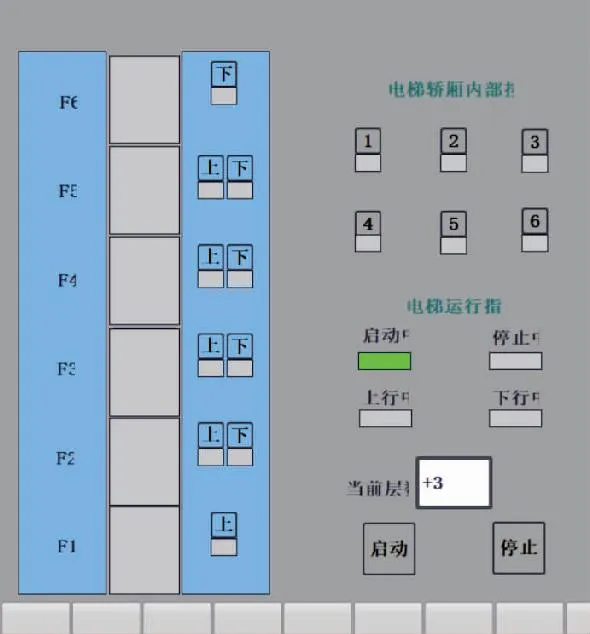
图7 电梯仿真示意图
在HMI设计过程中,首先,在WinCC组态软件中通常以图层进行画面的分层显示,图层以数字为编号,0号图层在最底层,1号图层在0号图层上面,以此类推。接着,轿厢的上、下行通过设置垂直动画来实现,那么前文所述的标尺(棒图)就需要给其设置变量连接,以实现程序与动画的关联。然后,轿厢的开关门设计是通过给电梯门添加水平移动动画来实现,同样也需要关联变量。最后,当前电梯的楼层显示要单独在PLC中编写对应程序,且每一个按钮都要与对应变量进行绑定。
5 电梯系统数据通信
本文通过工业通信标准OPC UA(OLE for process control unified architecture)协议实现上位机与西门子S7-1500PLC的数据通信[8]。
S7-PLCSIM Advanced是西门子公司研发的一款高性能仿真器,除了仿真PLC控制程序外,它还可以进行通信仿真[9]。本文基于该仿真软件进行OPC UA通信仿真环境搭建,实现电梯系统与上位机的数据通信。
5.1 S7-PLCSIM Advanced V3.0设置
西门子S7-PLCSIM Advanced V3.0软件安装过程比较简单这里不过多赘述,但有两个要注意,其一,PLCSIM-Advanced会依赖WinPcap软件;其二,在软件安装过程中需要进行不重启设置。这一点很重要,否则计算机会一直重启。软件安装完成后,在计算机中将多出一个虚拟网卡。
运行软件时同样需要注意几点:1)在计算机网络设置中,需将本地网卡和虚拟网卡的IP地址获取方式设置成自动获取;2)在控制面板中搜索PG/PC接口,将前面所述虚拟网卡设置为应用程序的访问点;3)通过TCP/IP通信协议以太网与PLC进行连接时,其中IP地址须保证与PLC的完全一致。本系统PLC的IP地址为192.168.0.1,子网掩码为255.255.255.0。
由于PLCSIM-Advanced只支持1500PLC,故本系统选择的是1513-1PN带显示屏的CPU。在博图项目中还需进行项目设置。首先,在项目属性中勾选“块编译时支持仿真”;然后,在CPU的属性下勾选“允许来自远程对象的PUT/GET通信访问”;最后,在下载到设备时,选择PG/PC接口为Siemens PLCSIM虚拟以太网适配器。
5.2 OPC UA环境搭建
在博图项目中增加一些数据块,数据块中添加需要监控的变量,以便后续以UaExpert作为客户端进行数据通信。然后,双击该CPU模块,找到OPC UA选项,将“激活OPC UA服务器”选中。最后,还需要点击OPC UA运行系统许可证选项,选择一个合适的许可证。设置完成之后,将PLC程序重新下载,至此实现了整个环境搭建。
5.3 系统数据通信
本文通过工业通信标准OPC UA协议,以UaExpert作为客户端,实现上位机与西门子S7-1500PLC的数据通信。将SIMATIC WinCC软件中的电梯模型进行编译并仿真,点击面板上“启动”按钮,模拟电梯进行初始化,此时电梯得电启动,“启动中”指示灯亮,当按下3楼上外呼按钮时,电梯上行来到3楼,即当前楼层数为3(图7)。与此同时,在电梯楼层指示监控程序中同样可以看到当前电梯楼层数为3,如图8所示。

图8 电梯楼层指示监控程序
从博图监控表中也能看到电梯运行时各个参数的值。如图9所示,当前“启动”的监视值为“TRUE”,“启动中”的监视值也为“TRUE”,与电梯仿真结果一致。

图9 电梯数据监控表
最后,本设计使用UaExpert软件进行PLC通信数据显示,即以UaExpert为客户端实现上位机与电梯控制PLC的实时数据通信。测试结果如图10所示,可以看到客户端显示数据与上述电梯仿真画面以及监控表的监视值均一致。此时该电梯控制系统与上位机通信成功,即证明该设计可以实现电梯系统运行状态的实时监控与数据监测。

图10 UaExpert通信数据
通过本设计,可以让工程师更好地判断当前电梯总体运行状况,在提高系统可靠性的同时规避风险,进而保障人民生命财产安全。故上述设计实现过程可为实际电梯控制系统提供一种更良好的解决方案。
6 结语
在本次数据通信中,系统采用的是UaExpert软件作为客户端,它可以成功进行PLC的通信数据展示,但作为客户端,纯数据展示在客户体验上可能稍显不足,况且如今数字化变革和新冠疫情引起了各行各业对数字化转型的需求,同时随着企业加快数字化转型的日程,这让人们意识到客户体验也是一个必不可少的、保持竞争优势的环节。
因此,后续可以尝试使用西门子低代码软件Mendix作为客户端与PLC进行数据通信,凭借其业内领先的低代码平台和全方位的生态系统,整合最先进的技术实现快速可视化开发,在进行数据监控的同时简化操作,提高互动性并进行丰富的界面展示,进而大大提高客户体验感。
