基于卫星遥感的输电沿线建筑物变化检测
2024-01-02周恺张睿哲谭磊叶宽赵建勇齐伟强蔡瀛淼范丽
周恺, 张睿哲, 谭磊, 叶宽, 赵建勇, 齐伟强, 蔡瀛淼, 范丽
(1.国网北京市电力公司电力科学研究院, 北京 100045; 2.国网北京市电力公司, 北京 100031; 3.北京深蓝空间遥感技术有限公司, 北京 100028)
近年来,随着经济和城镇化进程的快速发展,城市的发展对土地建设面积的需求加大,输电线路的规划与城市建设和土地资源开发之间的冲突越来越剧烈。输电线路是电网安全运行的关键,是关系国计民生的“安全线”,但各种工程建设等外力破坏致使输电线路事故时有发生,而传统的人工和监控设备巡检的方法不仅效率低,且成本高,存在一定的漏报和滞后性[1]。因此,需要寻找新的技术手段来解决以上问题,提高监测效率。随着遥感技术不断发展,遥感技术在城市规划、应急救灾和地表覆盖变化等多个领域有广泛的应用[2-5]。目前在电力领域,针对输电线路已经开展了地物分类和识别等研究,但通过变化检测方法对输电沿线识别外力破坏造成隐患区的研究很少,一般地,外力破坏隐患区多以建筑施工用地居多。
基于高分辨率遥感卫星影像的建筑物识别和变化检测研究是目前遥感监测等领域研究热点之一[6-8],快速有效地进行建筑物变化检测在输电线路建设等管理工作中具有举足轻重的意义,随着遥感卫星技术的进步,遥感影像的空间分辨率和时间分辨率也在日益增强,建筑物变化检测的方法也在逐步完善,逐渐由基于像元向面向对象的方法转变,主要的方法有两类。第一类是根据遥感影像中建筑物独有的几何、纹理和阴影特征提取其特征的变化信息,Xiao等[9]根据影像中纹理和光谱与特征提取像元级的建筑物变化信息,然后采用形态学方法将像元级变成对象级,并通过差分形态学指数进行建筑物变化识别。吴柳青等[10]提出一种基于多尺度多特征的自动化提取建筑物的方法,融合了亮度反差和边缘密度等特征,从而提高了建筑物检测精度。马剑林等[11]通过提取影像的纹理、形态和光谱特征组合构建最优多源特征矢量,并采用主动学习的变化检测算法对油气管道沿线地物变化情况进行检测。张志强等[12]通过构建光谱、纹理和特征指数特征集后进行随机森林影像分类获得像元级的建筑物变化检测,最后将影像分割结果和像元级的变化检测结果进行融合,得到对象级的变化检测结果。靖娟利等[13]构建了融合影像的纹理、光谱、水体和植被指数特征的不同方案,引入多层前馈反向传播(back propagation,BP)神经网络方法进行影像分类,提高了分类和变化检测的精度。卢丽琛等[14]提出基于面向对象的建筑物变化检测算法,利用建筑物指数(morphological building index,MBI)提取建筑物区域,并采用CVA(characteristic vector analysis)算法获得全部建筑物对象的差异度,最后根据合适的阈值确定变化和未变化对象。第二类是首先提取变化信息,再采用监督思想提取建筑区域,徐军等[15]基于提取到的建筑物和变化信息,采用改进的分水岭方法和MBI指数相结合提取了建筑物变化信息。付青等[16]分别对比最小距离、最大似然法、支持向量机三种分类算法的效果,采用分类精度最好的支持向量机方法对影像进行土地利用分类,并对不同时相下的分类结果进行了变化检测信息提取。徐锐等[17]提出了将IR-MAD(infrared multiple absorption detection)和Unet(unity networking)网络相结合的方法,首先提取影像中可能变化的像元,然后通过投票的方法将变化概率大的像元作为变化检测结果,但该方法无法将建筑物等阴影区域进行有效区分和识别,出现误分和漏分的情况。
现有的建筑物变化检测方法大部分都是基于监督思想,需要有一定的训练样本和先验条件,人工干预多,主观因素对检测结果影响较大,现提出一种融合建筑物形状、纹理和边缘特征,利用高斯模型进行建模实现像元级的建筑物提取,并引入多尺度分割结果实现对象级的建筑物提取,最后根据前后两个时相建筑物对象的空间格局识别出建筑物变化类型。本文算法可以实现输电沿线建筑物施工等外力破坏隐患区的提取,提高巡检效率,为输电线路沿线地区建筑物变化检测研究和工程应用提供技术支持。
1 研究方法
基于卫星遥感的输电沿线建筑物变化检测研究主要包括三个步骤:①建筑物初提取,基于影像预处理的结果,计算建筑物指数MBI,结合阴影提取结果和形状因子提取建筑物训练样本;②建筑物后提取,基于建筑物形状、纹理和边缘特征,利用高斯模型进行建模,并引入多尺度分割结果实现对象级的建筑物提取;③建筑物变化检测。具体流程如图1所示。
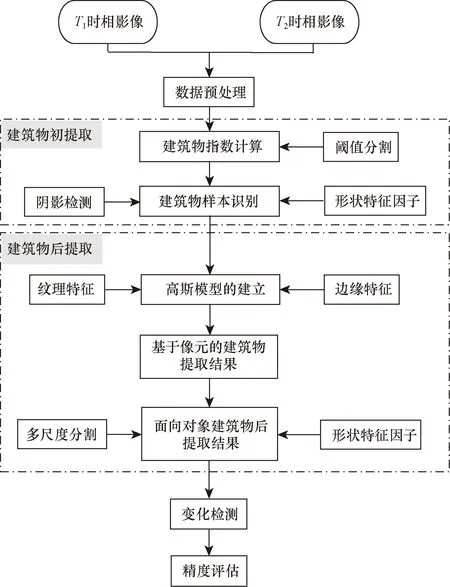
图1 技术流程Fig.1 Technical flowchart
1.1 建筑物初提取
1.1.1 阴影提取
高分辨遥感影像中建筑物、植被区域与对应阴影区域的位置关系和太阳方位角有关。鉴于此,利用建筑物、植被与阴影之间的位置关系进行阴影检测[18-19]。本文阴影提取方法如下。
(1)在可见光遥感影像中,由于太阳光形成的阴影区域与高亮度区域通常不受彩色空间的影响,因此,通过计算影像上原彩色空间与归一化彩色空间的差异来表征阴影特征。归一化计算公式为
r=R/(R+G+B)
(1)
g=G/(R+G+B)
(2)
f1=mean(|r-R|+|g-G|)
(3)
式中:R、G、B分别为影像的RGB(Red,Green,Blue)分量;r、g分别为归一化后的RGB分量;f1为第一阴影特征分量。
(2)由于地面大型的遮挡物形成的阴影,该阴影在光学遥感影像上表现出较低亮度,因此可以用亮度作为特征。目前计算亮度的方式有很多,如均值法、最大值法、转换到HSV(hue, saturation, value)空间等,但这些方法都没有考虑到人眼对RGB可见光的敏感程度,因此根据人眼对RGB可见光的不同敏感度,计算方式为
f2=0.46R+0.5G+0.04B
(4)
式(4)中:f2为阴影第二特征分量。
(3)由于植被区域树叶之间存在缝隙,遥感影像中会在植被区域显示斑点状阴影,因此需要构造植被区域特征。在可见光范围内,植被一般呈绿色,可以将绿光波段减去红光波段和蓝光波段的最小值作为特征。表达式为
f3=G-min(R,B)
(5)
f3(f3<0)=0
(6)
式中:f3为阴影第三特征分量。
(4)对于阴影特征f1,在遥感影像中阴影和高亮区域处的值一般较大;对于特征f2,阴影和植被区域处的值较小、而高亮区域呈现较大的值;对于阴影特征f3,植被区域呈现出较大的值、其他区域值较小。因此,根据以上关系建立阴影识别模型,三个阴影特征均需进行归一化处理,最后利用大津阈值分割即可得到阴影提取结果。阴影特征的计算公式为
f=αf1-βf2-λf3
(7)
(8)
式中:α、β、λ为三项特征分别对应的权值,根据多次实验获得经验值,分别设置为0.4、0.3、0.3;T为分割阈值,识别结果小于阈值T的即为阴影。图2为阴影检测结果图。
1.1.2 形态学建筑物指数(MBI)
形态学建筑物指数(MBI)在建筑物区域的光谱特征通常呈均匀分布,建筑物边缘差异明显、变化较大,而在建筑物内部较为均匀、变化较小,MBI的构建结合了建筑物的亮度、方向、大小和对比度等特征[20]。MBI计算的步骤如下。
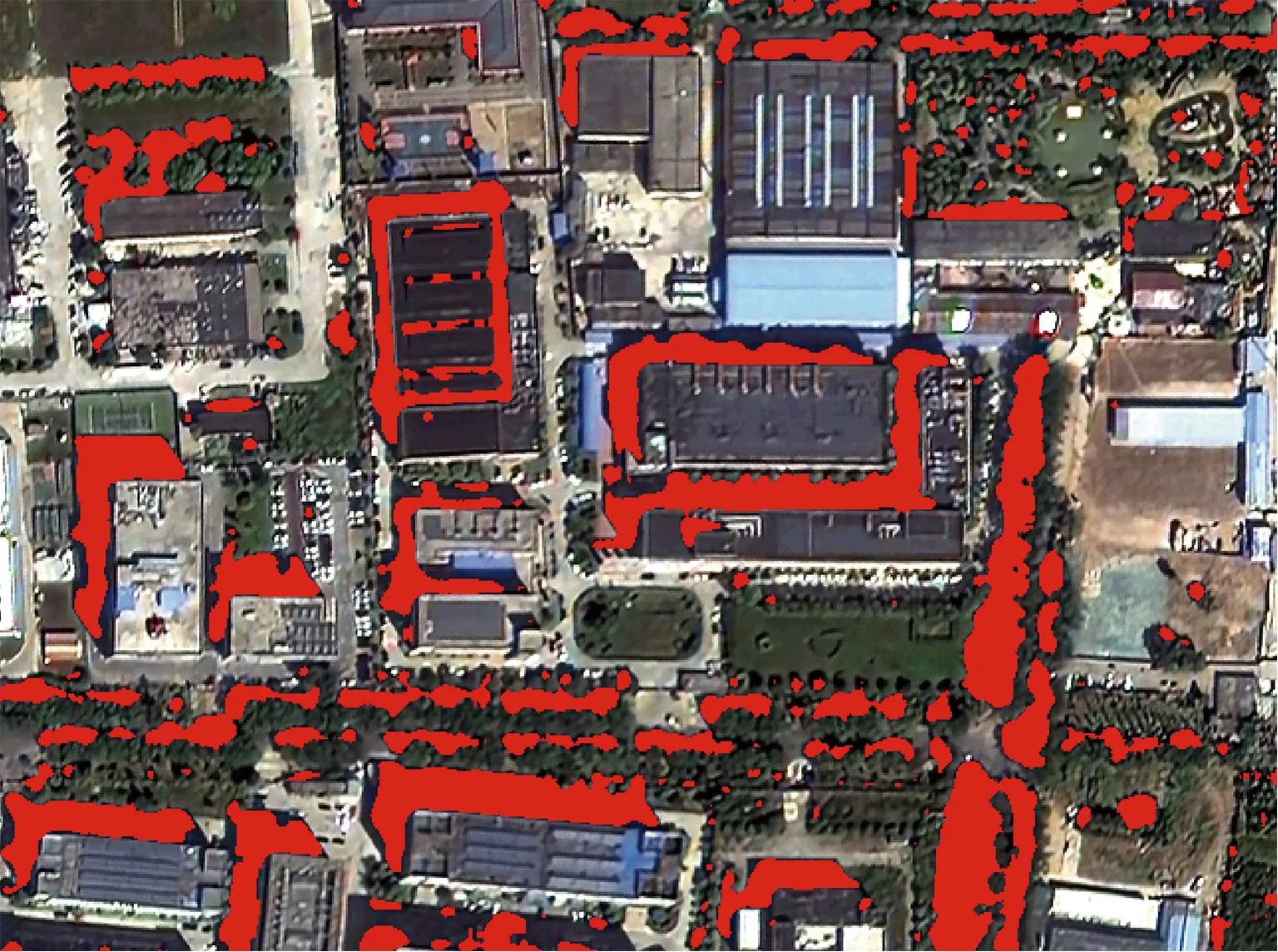
图2 阴影检测结果Fig.2 The result of shadow detection
(1)亮度值b(x),计算公式为

(9)
式(9)中:K为可见光波段总数;bandk(x)为k波段在像元x处的光谱值,可见光波段具有较高的反射率,将可见光波段像素的最大值作为该像素的光谱值。
(2)形态学白帽重构(white top-hat,WTH)。白帽变化的计算公式为

(10)
(3)形态学剖面(differential morphological profiles,DMP)。形态学剖面计算公式为
DMPWTH(d,s)=
|WTH[d,(s+Δs)]-WTH(d,s)|
(11)
(4)形态学建筑物指数(MBI),计算公式为

(12)
式(12)中:D和S分别为计算建筑物剖面时的方向和尺度总数,本文中最大尺度Smax为20,最小尺度Smin为3,ΔS为1。MBI值较大的即为建筑物,在MBI影像中呈现为较高的亮度,并利用大津阈值分割自动提取建筑物区域。
(5)MS(mean shift)影像分割。
MS影像分割算法是一种非参数的核密度估算方法[21],可将相邻并具有相似光谱特征的像元进行聚类,由于其分割精度高、收敛速度快等优势,被广泛应用于影像分割中,本文采用MS分割算法将MBI结果进行分割和矢量化处理,图3为MBI进行分割后的特征图。

图3 MBI分割图Fig.3 MBI split map
1.1.3 建筑物样本识别
基于MBI建筑物提取已识别出大部分建筑物对象,但道路等地物被误提,由于道路与建筑物形状差异较大,故采用形状特征因子对其进行有效的剔除[22],具体步骤如下。
道路一般呈现弯曲和直线的形状,基于MBI阈值分割结果,通过形状特征参数长宽比、矩形度将道路等不符合建筑物特征的区域删除,其中,长宽比R为定义为图像中最小外接矩形的长与宽的比值,即
(13)
式(13)中:L为建筑物初提取对象的最小外接矩形的长;W为最小外接矩形的宽,本实验中设置当R>4为道路,符合道路为长条的形状特点,判定其为背景干扰,将其设置为0,将R<4的判定为建筑物。
矩形度J为区域面积与其最小外接矩形面积的比值,即
(14)
式(14)中:A为建筑物初提取对象的轮廓面积;M为最小外接矩形面积,本实验中设置当J<0.7为道路,反之识别为建筑物。
通过MBI和形状因子等特征已提取大部分规则的建筑物,然后使用阴影检测结果将已提取的结果进行有效筛选,实现建筑物样本的识别。
1.2 建筑物后提取
完成建筑物初提取结果之后,其余未提取的建筑物区域通常与周边其他地物信息相似,且自身结构较为复杂,无法通过以上方法准确地提取建筑物信息。因此,将建筑物初提取的结果作为样本输入,选取纹理和边缘特征进行训练,建立高斯模型,完成全部建筑物的提取。
1.2.1 纹理和边缘特征提取
(1)纹理特征提取。遥感影像的几何和纹理特征可将地物进行有效的提取,为了优化建筑物样本,运用Log-Gabor滤波器对遥感影像的纹理和边缘特征进行提取,Log-Gabor函数在频域轴向的波形为高斯形状,因此,Log-Gabor函数本质上为高斯函数,其沿用了Gabor函数的多分辨率和多通道等优势,可使用不同方向和频率的滤波器计算影像的局部纹理特征,其计算量与Gabor函数相比有了大幅降低[23]。Log-Gabor的传递函数为

(15)
式(15)中:ω0为滤波器的中心频率;ω为滤波器的各等级频率;σω为倍频宽带。本文中采用Log-Gabor滤波器提取了一共30维特征作为纹理特征向量,其中包括影像的5个频率尺度和6个方向的特征。
(2)边缘特征提取。目前常用的边缘检测算法大多较为简单,运行速率快,但将其应用于遥感地物边缘检测中容易受到噪声的影响,且边缘离散不连续和细节信息缺失等情况,基于Canny边缘检测的方法被广泛应用于灰度边缘检测中,Canny方法可尽可能多的标识出影像中地物的实际边缘,且与影像中的实际边缘更加吻合[24]。Canny方法的实现步骤如下。
①图像降噪。采用高斯模型对影像进行平滑处理,计算公式为
(16)
式(16)中:x和y分别为像元的坐标值;σ为平滑尺度的参数。
②梯度计算。通过使用Sobel梯度算子对计算降噪后的影像中各像元的梯度值和方向。
③非极大抑制。非极大抑制是一种边缘稀疏算法,仅使用梯度值提取的边缘较为粗糙,而非极大抑制的作用为更加准确的定位影像的边缘,如果当前像元比其相邻两个像元的梯度值都小,则该像元被抑制,否则该像元为边缘点。
④双阈值边界跟踪。在进行非极大抑制操作后,剩余的像元可以更准确地表达影像中的实际边缘,然而,仍然存在一些噪声的影响,通过设置高低阈值剔除非边缘点,即如果边缘像元的梯度值小于低阈值时,将会被抑制;如果边缘像元的梯度值大于低阈值且小于高阈值,为弱边缘像元;如果边缘像元的梯度值大于高阈值,则为强边缘像元。
(3)主成分分析。主成分分析是为了降低算法的难度、减少运算时间,避免由于维数太多造成的维数灾难问题,本文中将纹理和边缘特征进行组合,并进行主成分分析,将前三个特征进行归一化后作为训练特征,形成特征向量。
1.2.2 基于高斯模型的建筑物提取
一般地,在建筑物集中区域建筑物分布相对较为密集,而在非建筑物区域分布较为稀疏,根据这一特点,Sirmacek[25]采用了空间投票矩阵的方法计算影像中每一个像元属于建筑物的概率分布,此方法的思想是像元与样本点之间越近,该像元属于建筑物的可能性也越大,反之,距离越远,其属于建筑物的可能性越小。本文结合建筑物样本和高斯模型对建筑物初提取影像中的像元进行概率建模,表达式为

(17)
式(17)中:p为任意像元属于建筑物的概率;d为维度,本文的维度为3;x为像元值向量;Σ和μ分别为协方差矩阵和均值向量,将未识别像元的特征向量逐个代入概率模型中计算其属于建筑物的概率,概率值的大小代表了该像元属于建筑物的概率大小[26]。并采用最大类间方差方法对每一个像元的概率值进行最大自适应阈值分割得到建筑物区域边界,获得像元级的建筑物提取结果,提取结果如图4(a)所示。
1.2.3 多尺度分割的建筑物后提取
多尺度分割的建筑物后提取主要步骤如下。
(1)采用分形网络进化算法对预处理后高分影像进行尺度分割。
(2)通过计算长宽比和矩形度,对道路等不符合建筑物几何特征的区域进一步去除。
(3)统计每个多尺度分割对象内识别为建筑物像元的面积占该对象总面积的比例,如果该比例大于50%,判定该对象内的所有像元为建筑物,反之亦然。
(4)对以上判定结果采用八邻域方式生成对象,减少噪声影响,完成基于像元的建筑物提取。
(5)将基于像元的建筑物提取结果与多尺度分割结果进行空间识别,将识别为建筑物的像元属性赋予分割结果,最后获得面向对象的建筑物斑块。
对象级的提取结果如图4(b)所示。可以看出,本文算法提取的建筑物区域边界与参考结果的边界基本吻合,与图4(a)相比,提取到的离散斑块进行了有效剔除,提取效果很好。
1.3 建筑物变化检测
根据提取的两期建筑物结果,采用空间叠加分析对建筑物变化情况进行分析,图5为遥感影像中建筑物的变化类型效果示意图。
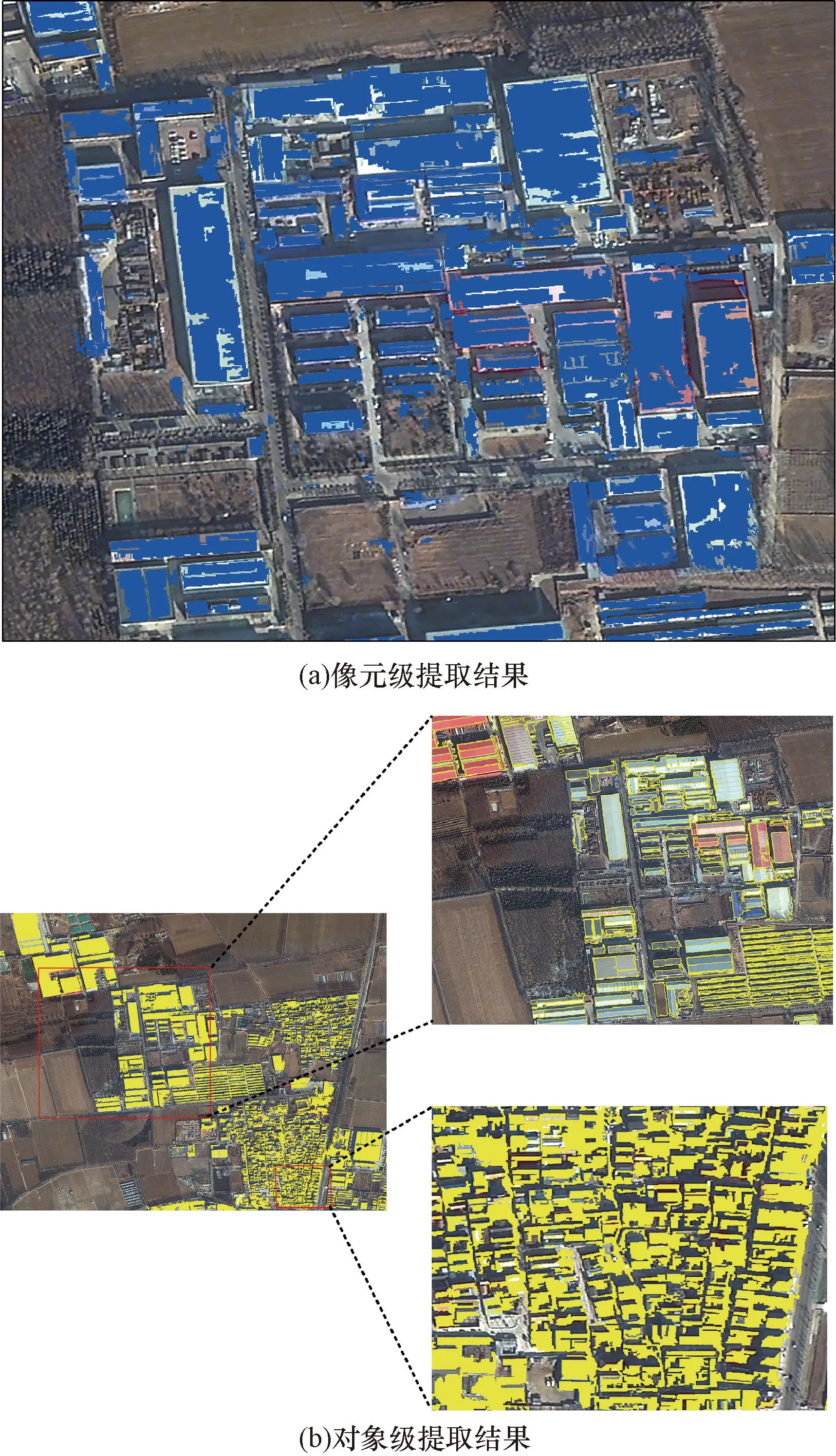
图4 建筑物提取结果Fig.4 Results of building extraction
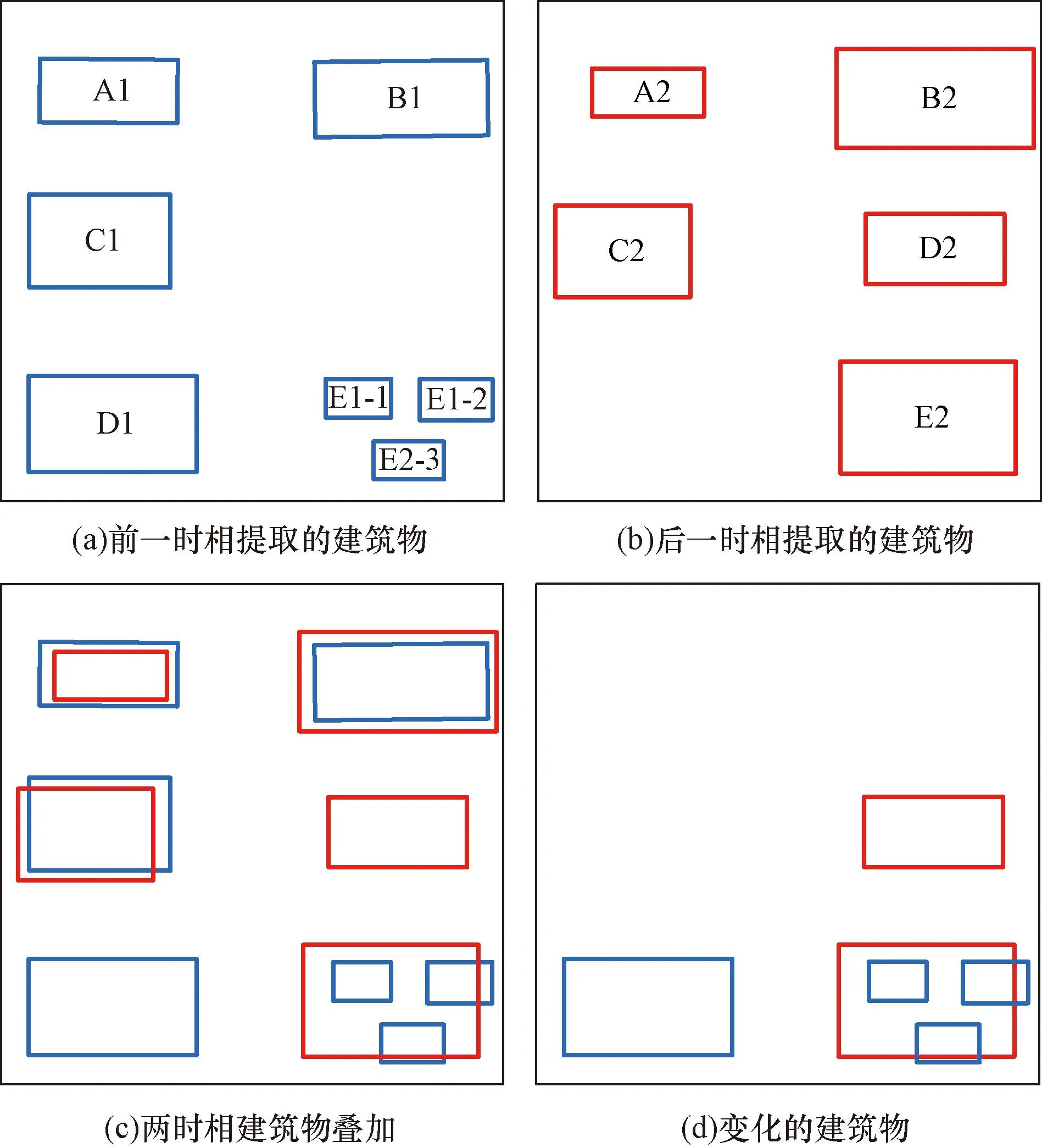
图5 建筑物变化检测示意图Fig.5 Schematic diagram of building change detection
变化检测的思想是将前后两时相的建筑物提取结果进行空间叠加后取交集[27],具体分为已下几种情况。
(1)当前一时相中存在建筑物A1、B1和C1,如果后一时相提取的建筑物对象A2、B2和C2与A1、B1和C1在空间位置上有重叠,且建筑物变化面积未超过前一时相建筑物对象面积的一半,判定为建筑物无明显变化。
(2)当前一时相中存在建筑物D1,如果后一时相提取的建筑物对象与D1在空间位置上没有重叠区域,判定为建筑物拆除。
(3)当后一时相中存在建筑物D2,如果前一时相提取的建筑物对象与D2在空间位置上没有重叠区域,判定为建筑物新增。
(4)当前一时相中存在建筑物E1-1、E1-2和E1-3,如果后一时相提取的建筑物对象E2与E1-1、E1-2和E1-3在空间位置上有重叠,且建筑物变化面积超过前一时相建筑物对象面积的一半,判定为建筑物改建。
2 变化检测结果与分析
2.1 实验数据
本文研究区位于北京市顺义区赵全营镇和牛栏山镇,区域内覆盖多条输电线路,研究选取了2021年11月1日和2022年11月1日的两景吉林一号(JL-1)卫星影像,影像包含2 m分辨率的红、绿、蓝和近红外的4个多光谱产品,以及0.5 m分辨下的全色产品。对两景影像分别进行辐射定标、大气校正、配准和融合等预处理操作,将融合后的分辨率为0.5 m的数据作为本文的研究数据。选取的3个研究区域范围如图6所示。
验证区位于河北省霸州市和保定市周边多个区县,主要对该区域内输电线路周围3 km缓冲区进行实验,验证选取了2021年3月12日和2022年4月5日的两景高分六号(GF-6)卫星影像,融合后的影像空间分辨率为2 m。

图6 研究区范围Fig.6 Scope of the study area
2.2 结果与分析
为定量评价本文提取的建筑物变化检测方法的性能,采用查准率P(precision)、查全率R(recall)和F1分数3个精度指标基于面积和图斑对象两个层次进行精度评价。其中,参考标准结果为人工解译的变化斑块,指标计算公式为

(18)
(19)
(20)
式中:TP1和TP2分别为本文识别算法和参考标准提取的建筑物新增和建筑物拆除,即正确检测;FP1和FP2分别为本文识别算法识别到而参考标准未识别出的建筑物新增和建筑物拆除,即误检测;FN1和FN2分别为本文识别算法未识别到而参考标准识别到的建筑物新增和建筑物拆除,即漏检测。
根据提取的两期建筑物结果,采用空间叠加分析对建筑物进行变化检测,并分别基于面积和对象两种统计方法对结果进行定量评价,结果如图7所示。由图7所示分布可以看出,研究区变化检测类型主要以建筑物拆除为主,其次分别为建筑物新增和建筑物改建,且大部分建筑物识别结果与影像中实际结果具有很高的吻合度。根据表1可以看出,基于面积和对象两种评价方法中查准率均大于91%,查全率均大于82%,F1分数分别为86.29和89.90,表明了本文算法可高效、准确地提取建筑物变化信息。
为了验证本研究提出的算法对大范围区域和不同影像分辨率下的适用性,选择了河北省霸州市和保定市周边的输电线路周围3 km缓冲区作为验证区,并采用本文的算法对该区域进行建筑物提取和变化检测,检测结果如图8和表2所示,由变化检测结果可知,由于验证区域面积较大且输入样本量有限,部分变化建筑物发生漏检测,建筑物周围的道路区域被误提出来,且存在一定的离散对象,但总体提取较为完整,轮廓清晰,整体效果较好。总体上,基于面积和对象两种评估方法中,建筑物变化信息提取的查准率均大于83%,查全率均大于80%,说明本文的算法有效的提取建筑物变化信息,算法较稳定,且能满足实际工作应用需求。

图7 研究区输电沿线建筑物变化检测效果Fig.7 Effect of building change detection along the transmission line in the study area
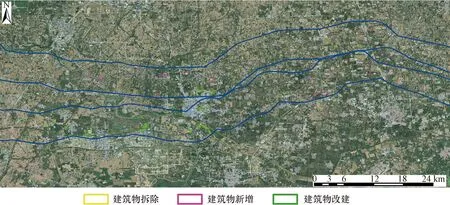
图8 验证区输电沿线建筑物变化检测效果Fig.8 Effect of building change detection along the transmission line in the verification area

表1 研究区变化检测精度统计Table 1 Statistics of change detection accuracy in the study area

表2 验证区变化检测精度统计Table 2 Verification area change detection accuracy statistics
3 结论
提出了一种基于融合建筑物特征和面向对象相结合的输电线路沿线的建筑物提取和变化检测方法,首先,结合阴影提取结果、MBI结果和形状因子对建筑物进行初提取,然后将初提取结果作为训练样本,提取建筑物形状、纹理等特征,同时采用高斯模型进行建模,并引入多尺度分割结果实现面向对象的建筑物提取,最后将前后两期的建筑物提取结果进行空间叠加分析完成变化检测。实验结果表明,本文提出算法能高效、快速和准确地提取建筑物变化信息,且能很好地保持变化检测结果的边界细节信息,轮廓较清晰,提取效果较好,同时可满足较大尺度下的建筑物识别精度,在一定程度上降低了人为干预的影响和模型对样本的依赖,有效地减少了建筑物提取和变化检测过程中的不确定性。因此,本文算法可有效地提取输电沿线建筑物变化或施工等造成的隐患区,为输电线路规划和巡检提供了新的工作手段。
