高速公路交通安全智能预警及诱导系统设计及应用
2024-01-01吴长明崔永恒





摘要:文章针对我国山区高速公路河流集中路段,在匝道并道口、分流口以及隧道口等危险路段,雨雾等恶劣天气情况下容易导致交通事故的情况,设计了一套交通安全智能预警及诱导系统。该系统通过声、光、电的报警提示效果,对道路交通进行动态的侦测、警告和管制,并整合路段全程监控视频进行能见度风险等级分析,提高雨雾天气高速行车安全,降低事故发生概率,避免二次事故的发生,提高道路通行效率,保障驾乘人员的生命和财产安全。
关键词:恶劣天气;智能预警;风险等级;行车安全诱导
U495A571833
0 引言
研究表明,在恶劣天气情况下,一些复杂的道路环境容易发生交通事故,但事故的核心在于驾驶员未能提前了解道路信息、疏忽大意以及车速过快等不当驾驶行为。以往危险路段交通事故的预防主要依靠反光路标、导向标志、警示牌等,但警示作用有限[1]。因此,迫切需要采用物联网、云计算、传感器等先进技术对驾驶员进行有效的提醒和智慧化诱导,防止事故的发生。
针对上述问题,本文基于“预防为主、防护结合、主动诱导、被动防护”的先进安全理念,提出了交通安全智能预警及诱导系统。在传统安全诱导设备的基础上,将全程监控视频流用于实时能见度分析,并在路侧安装了测速预警机器人和安全诱导灯,效果显著增强,能够满足大雾等恶劣天气条件下对车辆行驶速度限制和安全间距限制两方面的需求,降低雾天等天气对车辆通行的影响,提高道路行车安全。
1 交通安全智能预警及诱导系统总体架构设计
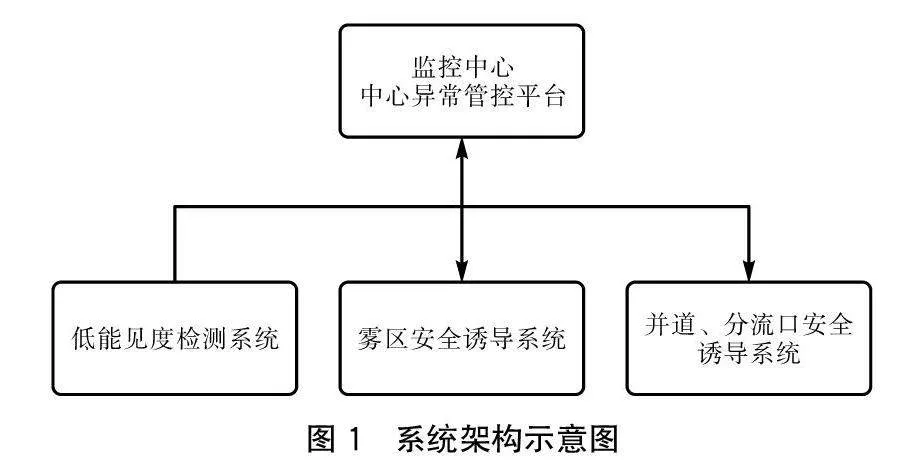
交通安全智能预警及诱导系统根据功能可分为“低能见度检测系统”“雾区安全诱导系统”“并道口安全预警系统”三个子系统。三个子系统通过中心异常管控平台综合分析调度。见图1。
系统根据技术架构主要由硬件部分、软件部分构成。硬件部分由主/从机预警主机和诱导灯组成。主机结构设计主要以交通测速屏、信息显示屏为主体,在设备机箱上安装声光报警灯、高音音柱、抓拍相机以及激光防疲劳仪。机箱内部安装5G通信模块、智能嵌入主控MCU电路、智能语音模块、北斗定位模块等。软件部分主要包括的是数据存储中心、视频能见度数据分析及处理中心、后端管理中心、前端应用管理。前端应用部分主要包括移动端APP和WEB端等。
1.1 低能见度检测系统
低能见度气象条件对交通、工作和生活都具有重大影响。尤其是团雾频繁易诱发重大恶性交通事故,已引起交通运营者高度重视,高速公路能见度的实时监测至关重要。目前高速公路使用的气象能见度检测仪因造价相对昂贵,且施工难度大,无法实现全线部署,且测试结果与当前环境存在一定差异,因此无法实现实时监测。而基于监控视频的能见度检测是一个很好的解决方案,其可以在高速公路现有监控系统的基础上实现能见度的实时监控,将有效解决高速能见度的实时监测问题[2]。
利用摄像头完成视频检测与分析,当出现暴雨、雨雾、团雾等恶劣天气,使得道路发生低能见度的状况时,视频检测服务器及能见度分析服务器通过计算得出准确的能见度值,并通过异常天气应急管控平台,及时将信息反馈并采取相对应的措施,防止危险事故的发生。
1.2 雾区安全诱导系统
智能雾区安全诱导系统是一种具有交通环境自适应特性的安全诱导系统。通过智能引导技术,该系统可自动调整车辆行驶速度和安全距离,从而保障雾天等低能见度天气下车辆的安全通行。该系统采用发光亮度、颜色和闪烁频率的不同组合实施针对性的引导策略,为驾驶员提供道路轮廓增强、主动驾驶引导和追尾预警等多种安全引导模式,提高道路行驶的安全性和效率。
1.3 并道口安全预警系统
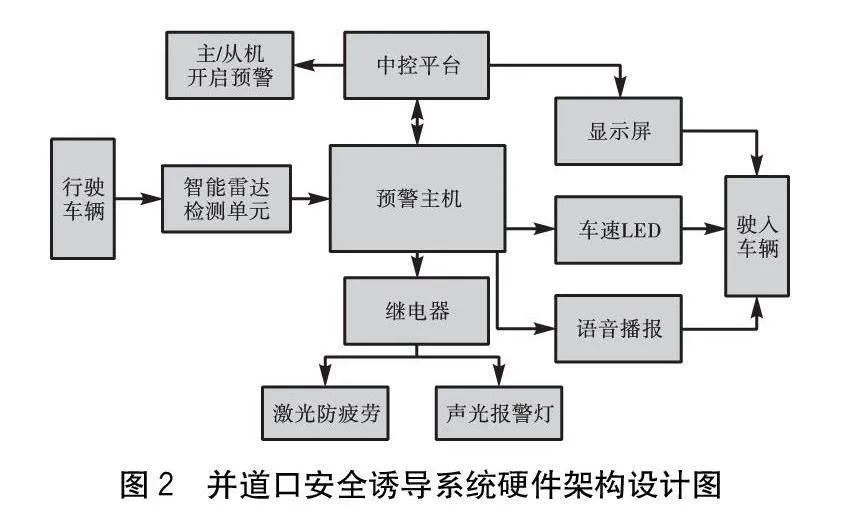
并道口安全预警系统集成了毫米波测速雷达、LED高亮显示屏、激光防疲劳、语音提醒、远程监控等功能,用于提示司机车速、防疲劳、信息发布等。对过往车辆实时警示、监控,有效降低司机的下意识的超速行为,有效减少交通事故的发生。
并道口安全预警系统硬件架构设计图如图2所示:
如图3所示并道口机器人由主控MCU、雷达测速控制单元、激光防疲劳、爆闪灯等组成。系统设计流程如下:
并道口预警机器人设备按成对(主、从机)配置安装。并道口预警机器人主机(安装在行车道护栏右侧靠近匝道200 m处)测速雷达探测到车辆实时车速,当车速超过路段限速值(如100 km/h)时,前方区域智能诱导灯处于红闪状态,限速屏显示来车的车速,警示机器人上部安装的爆闪灯闪烁,语音播报提示:“您已超速,请减速!”,并上报系统管控平台;当检测到行车道有车时即可联动匝道上安装的并道口预警机器人(从机),使其信息屏和语音控制播报提示:“行车道有车通过,注意减速避让!”。当有车辆从匝道进入并线区域,匝道上并道口预警机器人(从机)测速雷达探测到车辆实时车速,如果车速超过路段限速值(如40 km/h)时,前方区域智能诱导灯处于红闪状态,同时爆闪灯闪烁,信息屏及语音控制提示:“您已超速,请减速!”,并上报系统管控平台;当检测到匝道有车时联动行车道上安装的并道口预警机器人(主机)语音及信息屏提示:“匝道有车通过,注意行车安全!”。
2 系统硬件模块设计
智能预警及诱导系统的硬件关键技术涉及传感器、通信、数据处理、智能算法、显示和预警、可靠性和稳定性等方面,这些技术的综合应用可以提升交通安全水平,并为驾驶员和相关机构提供准确的交通信息和决策支持。
系统的硬件主要包括以下几个方面:
2.1 嵌入式智能芯片
交通安全智能预警及诱导系统是一套基于人工智能和物联网技术的智能交通管理系统,通过功能需求分析如运算处理能力、内存大小、外设接口、功耗等来设计合适的嵌入式微控制MCU,以及智能语音模块、北斗定位模块等。
系统的嵌入式MCU核心采用ST公司生产的STM32F4系列MCU。该MCU的性能可达210 DMPS,并配有一个专用音频锁相环和两个全双工I2S接口[4]。
定位模块获取的坐标为火星坐标(WGS-84)。本系统采用的是百度坐标系,因此使用WGS-84坐标转换GCJ-02坐标算法,再使用GCJ-02转换算法把坐标转换为BD-09坐标后,实现了设备的精确位置获取[3]。GCJ转BD坐标转换算法如下:
x_PI=3.14159265358979324×3000.0/180.0;
z=sqrt(lng2+lat2)+0.00002×sin(lat×x_PI);
theta=atan2(lat,lng)+0.000003×cos(lng×x_PI);
bd_lng=z×cos(theta)+0.0065;
bd_lat=z×sin(theta)+0.006;
注:sqrt表示开平方根,bd_lng表示经度,bd_lat表示纬度。
2.2 传感器技术
通过使用不同类型的传感器,如摄像头、毫米波雷达等,实时监测道路上的交通情况和车辆行驶状态。传感器技术可以帮助系统准确获取车辆位置、速度、加速度等信息,为安全预警和诱导提供基础数据。
雷达测速利用多普勒效应,通过计算电磁波频率的变化来判断目标车辆的速度,从而实现车辆测速功能。
雷达测速中使用的多普勒效应计算公式如下:
f=(c+vr)/λ(1)
式中:f——接收到的电磁波频率;
c——电磁波的速度(通常近似等于光速);
v——目标车辆相对于雷达设备的速度;
r——雷达设备到目标车辆的距离;
λ——电磁波的波长。
式(1)中的vr代表的是径向速度(也称为速度分量),即目标车辆相对于雷达设备沿着射线方向上的速度分量。当目标车辆靠近雷达设备时,vr为正;当目标车辆远离雷达设备时,vr为负。其中:实际速度=雷达输出速度/cos(夹角)。见图4。
2.3 显示和预警技术
系统采用高亮LED屏幕、激光防疲劳等技术,以直观清晰的方式向驾驶员显示交通预警信息。显示技术可以帮助驾驶员快速理解和响应预警信息,有效提高交通安全。
2.4 通信模块设计
系统采用5G、物联网、LORA等无线通信技术,向驾驶员和高速公路养护人员传输预警信息。为了保证通信的可靠性,系统需要设计合适的通信协议,包括数据格式、传输速率和纠错机制,以实现实时数据传输和远程控制,提高系统的响应速度和可靠性[4]。
3 系统软件及算法技术
软件部分主要包括数据处理中心、前端部分(主要包括手机APP和WEB)。根据功能分为:视频数据采集与处理方法、交通视频能见度分析、基于YOLO V5的卷积神经网络算法和决策技术。
3.1 恶劣天气公路路况视频数据采集与处理方法
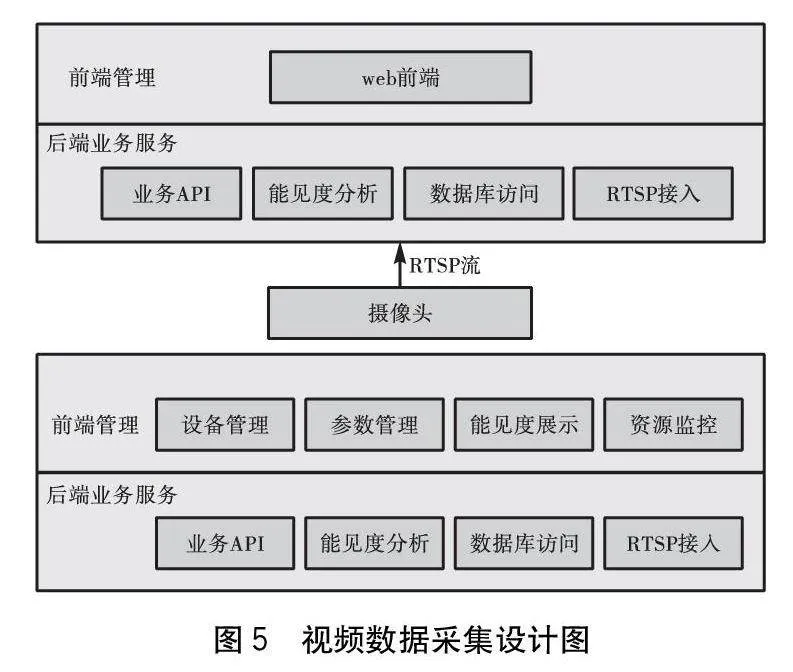
视频能见度分析系统由两部分组成,分为前端和后端。前端实现管理和配置功能,后端实现视频能见度分析功能。
系统采用B/S架构。B/S架构中,客户端通过浏览器访问服务器上的应用程序,服务器负责处理业务逻辑和数据存储。见图5。
后台服务器的主要功能有:获取RTSP流和数据信息,并在后台智能格式化存储信息,导出指定格式数据并提供标准化接口,把数据可视化,提供API接口给前端调用。实现视频推流和录像功能,展示抓拍图片,高音音柱播放声音,根据北斗定位智能定位设备位置。
3.2 恶劣天气公路路况视频能见度分析
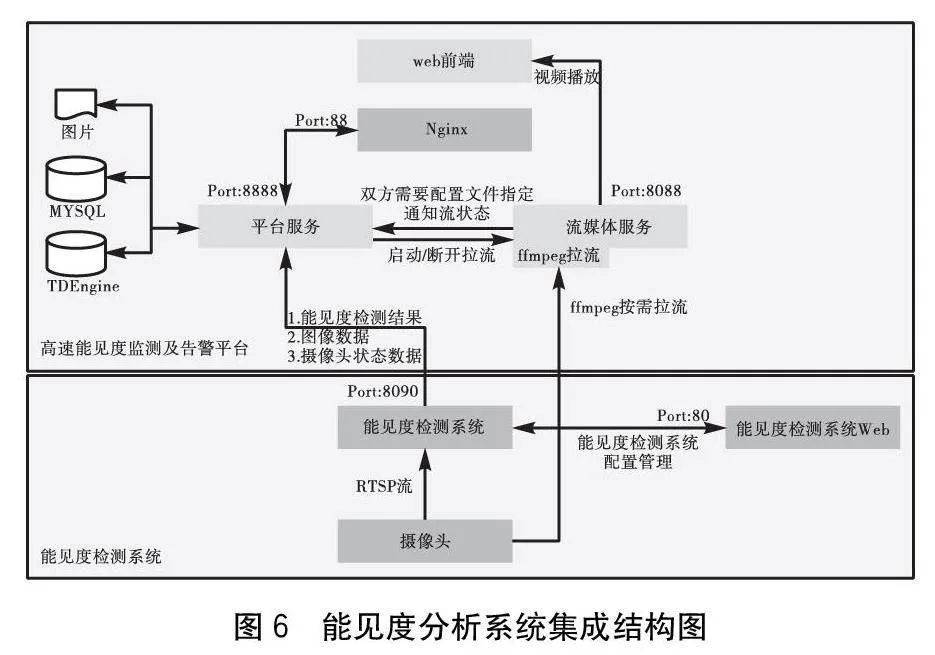
视频能见度检测系统基于视觉感知技术,模拟人眼对场景的能见度进行判别,最终得出能见度值。本系统将能见度划分为5个等级:优、良、差、极差、恶劣。集成关系图如图6所示。
视频检测服务器及能见度分析服务器通过对摄像机采集的大量图片数据进行实时处理和分析,并生成相应的预警和诱导策略。
3.3 基于YOLO V5卷积神经网络算法和决策技术
智能算法可以对不同的交通情景进行建模和仿真,从而提供更加精准和有效的预警和诱导措施。
系统中视频能见度算法的核心是卷积神经网络(深度学习),将可见性值映射到五个级别。卷积神经网络(CNN)广泛应用于图像识别、目标检测等领域。在视频能见度图片分析中,CNN可用于预测视频中物体的可见性[4]。见图7。
传统的气象环境检测系统无法全面覆盖所有路网,而高速公路监控体系可以全路网覆盖,通过基于视频的能见度检测和预警体系,实现能见度的态势感知和预警。通过分析模型对能见度态势进行分析,为各级指挥调度提供决策依据,包括智能分析算法快速准确发布预警信息。
4 高速公路交通安全智能预警及诱导系统应用场景测试
4.1 实际应用场景介绍
高速公路交通安全智能预警及诱导系统可以通过实时监测和分析交通数据,提供准确的交通安全预警和诱导服务,从而提高道路交通的安全性和流畅性。系统的实际应用场景主要有:事故预警、道路拥堵预警、恶劣天气预警、车辆超速预警、车辆违法预警、车辆诱导、应急救援等。
当高速公路出现恶劣天气时,系统实时监测和分析天气数据,及时发现恶劣天气的区域和严重程度,为驾驶员提供最佳行驶路线和引导信息,帮助驾驶员避开拥堵路段和危险区域,提高驾驶安全性和流畅性,并向相关部门发送预警信息,提醒驾驶员注意安全驾驶[5]。
4.2 应用效果验证
为验证系统方案的可靠性,在上思至防城港高速公路搭建了交通安全智能预警及诱导系统测试环境。经过一段时间验证测试,系统对高速公路恶劣天气和交通状况的实时监测准确率达到98.51%(见表1)。实践结果表明,本系统能够实时、快速、准确地收集恶劣天气信息,并自动发出预警,有效提高了高速公路气象灾害的应对能力和安全系数。
5 结语
本文基于物联网、云计算、传感器等先进技术,设计了一套有效的交通安全智能预警及诱导系统。实际应用案例证明,本系统对低能见度分析实时性、准确度高,且司机行车预警效果明显,能有效提高恶劣天气下高速公路行车的安全性,降低能见度对车辆通行的影响,对有效减少交通事故发生具有重大意义。
参考文献:
[1]广州市丰海科技股份有限公司.一种雾天公路行车安全诱导装置[P].中国:CN202020666974.4,2020-04-25.
[2]郑国红.基于TTS技术的高速公路ETC车道语音诱导系统设计及应用[J].西部交通科技,2022(10):190-192.
[3]陈建龙.团雾路段安全保障技术研究[D].北京:北京工业大学,2018.
[4]汤 伟,方嘉楠,张 龙,等.基于孪生网络的高速公路雾天能见度识别方法[J].交通信息与安全,2023,41(4):122-142.
[5]秦严严,肖腾飞,贺正冰.雾天场景下高速公路通行能力分析及提升策略[J].交通运输系统工程与信息,2023,23(3):39-47.