基于改进YOLOv4 颈部优化网络的安全帽佩戴检测方法
2023-12-26徐先峰马志雄姚景杰赵万福
徐先峰,王 轲,马志雄,姚景杰,赵万福
(长安大学 能源与电气工程学院,西安 710016)
建筑施工安全是建筑施工现场作业的生命线[1]。为了能够对施工人员安全帽佩戴进行全天候、无死角监督[2-3]; 高准确性、高实时性满足复杂背景安全帽检测算法至关重要。
为实现安全帽佩戴自动检测,研究人员进行大量研究,但基于传统安全帽佩戴检测主要通过捕获边缘、颜色等特征[4-5],对于复杂施工环境下检测效果一般,且效率低、耗时长,无法真正应用到实际施工现场,这使准确、高效实现安全帽佩戴检测成为一项艰巨任务。随着人工智能技术发展,基于深度学习方法逐渐成为目标检测的主流方法[6-7],YOLOv4[8]作为经典基于深度学习的目标检测算法之一,在处理复杂背景下安全帽检测时表现出优异的检测效果,但存在训练步骤繁琐、测试训练速度慢、占用计算机内存空间大等缺点。轻量型网络MobileNet-SSD[9]充分利用密集块中卷积层产生的输出特征图,重复使用这些特征,降低了参数和计算成本,然而其易出现漏检、错检现象。
研究的主要贡献为:①充分结合深度学习方法和轻量型网络MobileNet-SSD 两者的优点,在YOLOv4 网络基础上对其改进,高效准确实现安全帽的检测与识别;②引入轻量型MobileNet 网络加快安全帽的佩戴检测速度,解决YOLOv4 算法参数量巨大、检测速度缓慢等问题。进一步改进MobileNet 网络结构,将浅层语义特征进行加强;③通过改进特征金字塔和引入并改进注意力机制等颈部优化策略聚焦目标信息,解决图像中小目标分辨率低,信息特征少,多尺度并存,小目标在连续卷积过程中容易丢失特征信息等问题;④基于改进YOLOv4 算法的安全帽佩戴监测方法实现了在极端可视化条件和极端小目标情况下均对安全帽佩戴的快速准确检测,并且检测速度与检测精度达到平衡。
1 安全帽佩戴检测算法
1.1 YOLOv4 模型算法
YOLOv4 是经典的目标检测算法,主要是对分帧标注后的图片进行特征提取,利用回归思想对目标进行分类和位置定位,最终得到检验框位置、类别及置信度。YOLOv4 在复杂背景下具有优异的检测效果,适用于安全帽佩戴场景检测[10]。
考虑到实际应用中的视频监控设备多使用CPU 平台,不具备GPU 的并行加速计算能力,在CPU 平台下YOLOv4 算法检测速度缓慢,时效性差,难以满足实时性要求,在YOLOv4 算法基础上引入MobileNet 轻量级网络并对其进行改进。轻量化YOLOv4 网络可有效加快检测速度,但对于监控视频中含有多夜间极端条件和极端小目标时易造成安全帽佩戴的漏检、错检等现象。因此在轻量化网络基础上,YOLOv4 颈部网络中改进特征金字塔FPN 设计了信息连接层,小目标特征信息在提取过程中保持信息完整,获得更好鲁棒性的语义信息,改进注意力机制聚焦目标信息,弱化安全帽检测时背景信息的干扰。
1.2 YOLOv4 模型算法
按照改进顺序依次对MobileNet 网络、新型特征金字塔和轻量双注意力机制进行介绍。将其称为基于改进的YOLOv4 颈部优化网络算法,其网络结构如图1 所示。

图1 基于改进的YOLOv4 颈部优化算法网络结构Fig. 1 Network structure based on improved YOLOv4 neck optimization algorithm
1.2.1 MobileNet 轻量化分析
MobileNet 是一种兼备检测精度和检测速度的轻量型神经网络,通过构建深度可分离卷积改变网络计算方式,降低网络参数量、模型复杂度,提高模型的检测速度。深度可分离卷积是实现轻量型神经网络最关键一步。深度可分离卷积将标准的卷积分解成逐点卷积和深度卷积[10-11]。
假设输入特征图大小为DF×DF×M,其输出特征图大小为DF×DF×N,其中:DF表示特征图的高和宽,M和N表示特征图的通道数。
其中:Sa为传统卷积参数的总数;深度可分离卷积的总计算量Sb为深度卷积计算量Sc与逐个卷积计算量Sd之和;Sc为深度卷积计算量;Sd为卷积计算量;Sb/Sa为深度可分离卷积总计算量与传统卷积计算量之比。明显深度可分离卷积的计算量比传统卷积核小很多,卷积核个数N越大,计算量更大。
YOLOv4 网络中的基础网络CSPDarknet53 是传统卷积网络,其一层的计算量经公式(1)得到,经计算CSPDarknet53 的参数量为27.6*107。对于MobileNet 网络中采用深度可分离卷积,每一层对应的计算量由公式(4)计算,经计算MobileNet 网络的参数量为4.2*107。利用MobileNet 网络替换YOLOv4 的CSPDarknet53网络,参数量下降为原来的YOLOv4 网络更加轻量化,有效减少内存消耗,为YOLOv4 安全帽佩戴检测算法在CPU 平台应用提供了可能。
在目标检测领域,一张图片可以产生数以千计的预测样本,其中大部分预测样本与目标检测的背景有关,称其为负样本,只有一小部分样本与检测目标有关为正样本,为减少随机预测框数量,在MobileNet 网络基础上创新性引入跨越模块(crossing block),跨越模块由卷积层和池化层组成,如图2 所示,其主要通过增加神经网络中独特描述特征的数量,降低计算复杂度。在跨越模块中为了保留目标的显著特征和减小空间大小,首先对特征图进行全局平均池化,然后经批量归一化、Relu 激活函数、卷积层等操作。批量处理归一化(BN)和ReLU 非线性应用在每个卷积层之后,除了最后一个没有使用ReLU 的卷积层。选择全局平均池化是因为直接实现了降维,极大减少网络参数量,并对局部信息进行整合。
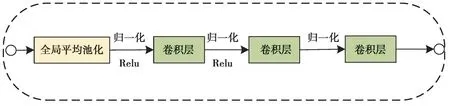
图2 跨越模块Fig. 2 crossing block
在MobileNet 网络的结构基础上引入跨越模块称其为改进的MobileNet 网络,其网络结构如图3 所示。在第一个卷积块之后插入2 个跨越模块,直接将浅层语义信息直接传递到第6 个benck 模块和第10 个benck模块,对浅层语义特征进行加强。跨越模块将浅层语义特征直接从第一层传递到网络最后一层。在神经网络中,层空间大小逐渐减小,无法直接进行连接。利用add 方式将不同空间大小的层连接起来,利用从第一层提取的语义特征丰富最后一层。add 方式在保证维度不变情况下,每一维的信息量增多,增强目标检测的分类效果。

图3 改进的MobileNet 网络结构Fig. 3 Improved MobileNet network architecture
1.2.2 新型特征金字塔
特征金字塔FPN 提出使多尺度特征融合技术在计算机视觉领域得到广泛应用,特征提取能力显著加强。研究人员基于FPN 特征网络结构进行跨尺度特征融合的大量研究。FPN 特征金字塔[12]利用浅层语义特征区分简单目标,深层语义特征区分复杂目标,PANet[13]在特征金字塔FPN 的基础上增加了额外路径聚合层,其双向融合方式较为简单。引入可学习权重对不同特征层的特征信息进行加强,重复利用高层语义特征和低层位置特征,形成双向特征金字塔BiFPN[14],如图4(a)所示。
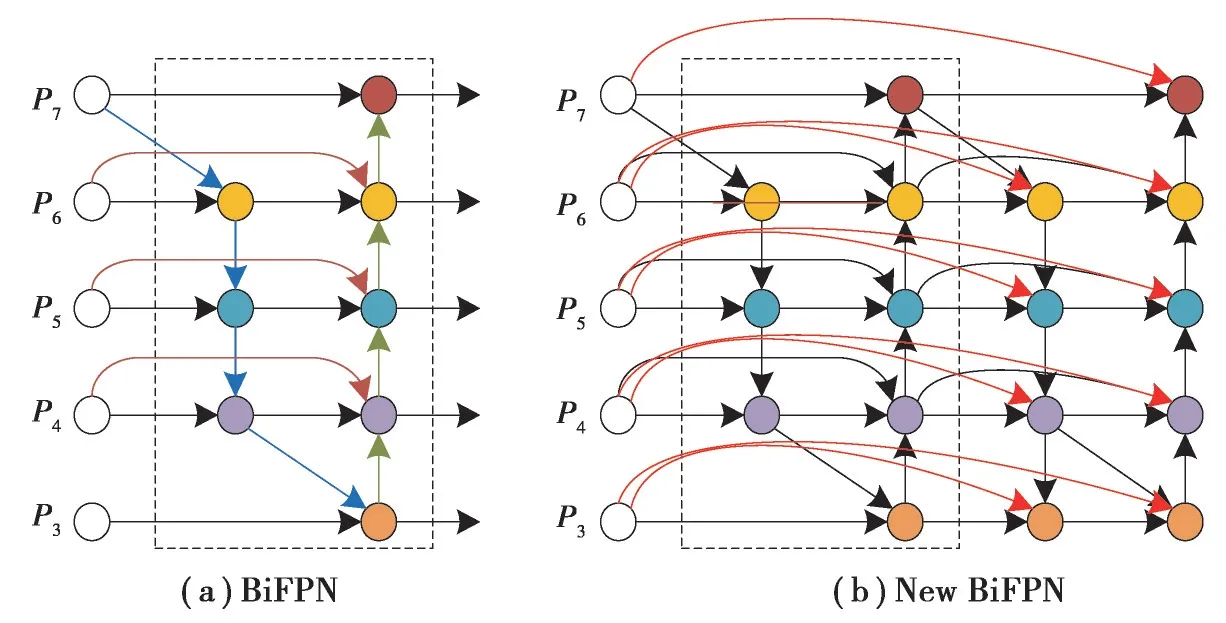
图4 特征金字塔Fig. 4 Feature Pyramid Networks
安全帽佩戴检测过程中需要利用摄像头拍摄到的监控画面,摄像头距离施工人员的远近导致拍摄目标大小形状往往各不相同。为了解决多尺度以及在特征提取时浅层语义特征信息丢失问题,笔者研究了一种新的基于双向尺度连接特征融合的新型特征金字塔,如图4(b)所示该网络具有信息直接连接层和浅层信息融合层。针对小目标在连续卷积过程中特征信息丢失问题,在特征融合网络中设计了信息连接层,直接在双向跨度特征金字塔的每个节点迭代输出与初始输入特征映射进行特征融合,使小目标特征信息在提取过程中保持信息完整。
使用多尺度目的是为了融合不同分辨率下特征图信息。给定一组多尺度输入Pin= (Pin1、Pin2、...、Pinn),其中Pini表示第i层的特征信息。多尺度融合方法其公式为
其中:conv 表示卷积操作;Resize 表示为了匹配特征尺度进行的上采样或下采样操作。
使用特征加权融合方法对不同特征尺度的特征层进行融合,对每个输入添加额外的权重,使得网络对不同特征输入进行调整与融合,其融合公式如(9)所示
其中:ωi是一个可学习的权重,其值位于0 和1 之间。通过添加一个很小的ε来保证数值的稳定性;Ii表示第i个特征输入量。
如图4(a)所示,其中虚线表示特征金字塔的基本单元。对其中P4层为例进行迭代,其中包括2 层,中间层和输出层,如公式(10)、(11)所示
其中:Ptd4表示P4层中间层的输出;ωi和Resize 跟前文一致;Pout4表示P4输出层的输出。
新型特征金字塔是在BiFPN 特征金字塔基础上设计了信息直接连接层,如图4(b)中红线所示将每个节点的迭代输出与初始输入特征映射进行特征融合。利用信息直接连接层在双向跨尺度连接特征融合金字塔的每个迭代输出节点上与初始输入特征映射进行特征融合,使小目标特征信息在特征提取过程中保持完整。计算方法如公式(12)所示
1.2.3 轻量双注意力机制
注意力机制在目标检测领域得到广泛应用,其能够聚焦目标信息,降低背景信息对检测效果的影响,有效提高神经网络对于目标的识别能力。为充分考虑安全帽检测的准确性和实时速度,利用通道注意力和空间注意力机制模型,笔者研究了一种轻量双注意力机制模型LDAM(lightweight dual attention module),如图5所示。LDAM 借鉴了DAM[15]和CBAM[16]的优势,在有效性跟效率性之间取得平衡。

图5 LDAM 模型Fig. 5 Lightweight Dual Attention Module

图6 真实场景下的检测图像Fig. 6 Detection image in real scene
轻量双注意力机制依次通过通道注意力机制和空间注意力机制,在进行聚焦目标信息的基础上,没有产生额外的权重和计算机成本。图7 红色虚线框是一种注意力机制全局池化模型。其主要应用有两方面:用于全局空间上下文池化;用于全局通道上下文池化。

图7 两类目标PR 曲线、F1 曲线及AP 值Fig. 7 Two kinds of target PR curve, F1 curve and AP value
给定输入特征图U∈RC×W×H,注意力机制全局池化模型通过Softmax 计算得到自注意力矩阵M1,如式(13)
其中:W1代表权重向量;Softmax 表示归一化函数。
最后自注意力矩阵M1与输入特征向量U进行相乘,得到向量a
其中:a代表每个通道的全局信息;通道注意力输出特征图V∈RC×W×H经过全局平局池化网络,后经过Softmax 计算得到每个空间的全局信息β。
轻量双注意力机制模型依次通过通道注意力机制和空间注意力机制可将数据量从O(CWH)减少到O(WH),有效提高目标检测速度。
2 实验结果与分析
2.1 数据集构建
实际工程应用信号运行环境更加复杂,所采集振动信号噪声干扰更强,针对目前安全帽数据集规模较小,为了正负样本保持平衡,保证数据样本多样性,依托互联网平台大量采集安全帽图像,利用视频截图软件YoloMark 对人员流动性大、建筑物遮挡、夜间可视化条件差等复杂施工背景下的视频进行分帧截取图片,截图的图片覆盖了复杂背景下的各种施工人员佩戴安全帽情形。数据集中包含图像10 032 张,其中包括安全帽目标13 909 个,未佩戴安全帽人脸目标112 728 个。
将数据集随机划分为2 部分:训练集和测试集。其中训练集为4 636 张安全帽图像和3 396 张人脸图像,测试集为1 000 张安全帽图像和1 000 张人脸图像。
2.2 模型训练
为验证基于改进的MobileNet-YOLOv4 安全帽佩戴检算法,获得最优模型,笔者迭代轮次设置为100 步,IOU 阈值设置为0.5。模型训练100 个迭代轮次(Epoch),前50 个迭代轮次引入冻结训练来加快训练速度,防止训练初期权值被破坏。刚开始训练时,为使损失函数快速下降,批量大小(Batch size)设置为16,一个迭代轮次迭代次数为383。后50 个轮次解除冻结进行全网络训练。为防止错过最优点,批量大小为8,一个迭代轮次迭代次数为767。参数设置如表1 所示。

表1 基础参数表Table 1 Base parameter table
2.3 评价指标
通常衡量目标检测算法性能指标主要围绕检测速度和检测精度2 个方面。检测任务的精度用平均精确度(mAP)及精确率与召回率的调和平均数(F1)等评价指标来衡量;1 s 处理图片的数量(FPS),其用于评价算法的检测速度。主要依据这4 个指标对安全帽佩戴检测算法进行评价。
1) mAP
mAP 表示平均准确精度,通常需要以下3 个指标进行综合评价:召回率Recall、准确率Precision、平均精度Average precision,计算公式如(15)、(16)所示.
其中:TP(true positive)即模型预测正确的正样本;FP(false positive)代表模型预测错误的正样本;FN(false negative)代表模型预测错误的负样本;TN(true negative)代表模型预测正确的负样本。召回率表示在所有标注中正样本所占的比重,准确率表示模型预测为正样本占总体正样本的比重。Precision-recall 曲线(PR曲线),是以Recall 为横轴、Precision 为纵轴,反映了分类器对正样本的识别准确度和对正样本的覆盖能力之间的权衡。AP为PR曲线与X轴围成图形的面积。
对于连续的PR曲线,如公式(17)所示
对于离散的PR 曲线
每种类型的目标都对应着一个AP,mAP 是所有AP的平均值
2)F1
F1 是准确率和召回率的调和平均,如公式(20)所示。
F1 的取值范围在0 和1 之间,取值越大表明检测精度越理想。
3) FPS
FPS(frame per second)即1 s 可以处理图片的数量。不同的检测平台其性能各不相同,因此评估FPS 参数时必须在同一设备上进行测试。可以对单位时间内处理的图片数量进行统计,数量越多,表示速度越快,也可以对处理单个图片所需的时间来测量检测速度,时间越短,表示速度越快。
2.4 结果分析
为验证研究算法在复杂工地背景下检测性能的优越性,对测试集进行测试,统计2 类目标安全帽和未佩戴安全帽的人脸检测精度AP,其中以召回率Recall 为横轴,准确率Precision 为纵轴,测试结果如图7 所示。
由图7 可知,安全帽的AP为94.27%,其AP大于90%,精度较高。未佩戴安全帽的人脸的AP为88.98%,整体模型的精度为91.12%,佩戴安全帽的F1 值为0.93,未佩戴安全帽的人脸F1 值为0.86。
除了对检测精度AP进行检测,还需对检测速度FPS 进行探究。使用GPU 型号为GTX 1080Ti,有效提高计算机计算性能,在实际应用场景中,视频监控一般使用普通的CPU 设备,不具备GPU 的并行加速计算能力。在其他硬件平台相同下,分别在使用GPU 和CPU 设备下对最终模型的检测速度进行统计,基于改进的YOLOv4 颈部优化网络算法在不同平台下的检测速度如表2 所示。

表2 改进的YOLOv4 颈部优化网络在不同平台下检测速度比较Table 2 Improved YOLOv4 neck optimization network compares the detection speed under different platforms
与YOLOv4 在CPU 平台下的速度(2.14 FPS)对比,基于改进的YOLOv4 颈部优化网络的检测速度是其16 倍左右,同时检测精度相比于YOLOv4 算法检测精度提升了4.21%,基于改进的YOLOv4 颈部优化网络无论在CPU 还是GPU 平台下,检测速度都超过24 FPS,满足实时性要求。因此,基于改进的YOLOv4 颈部优化网络在保证检测精度的同时,在CPU 平台下检测速度达到34.28 FPS,使基于改进的YOLOv4 颈部优化网络在CPU 平台上顺利实现,在检测精度和检测速度2 个方面均表现出良好检测性能。
为更进一步验证提出算法具有较高检测精度和检测速度,使用相同的测试数据集在Faster-RCNN、SSD等目标检测的经典算法进行对比,其中YOLOv4、Faster R-CNN、基于YOLOv4 的颈部优化安全帽佩戴检测等算法的损失随迭代步长的变化曲线如图8 所示,其训练结果如表3 所示。
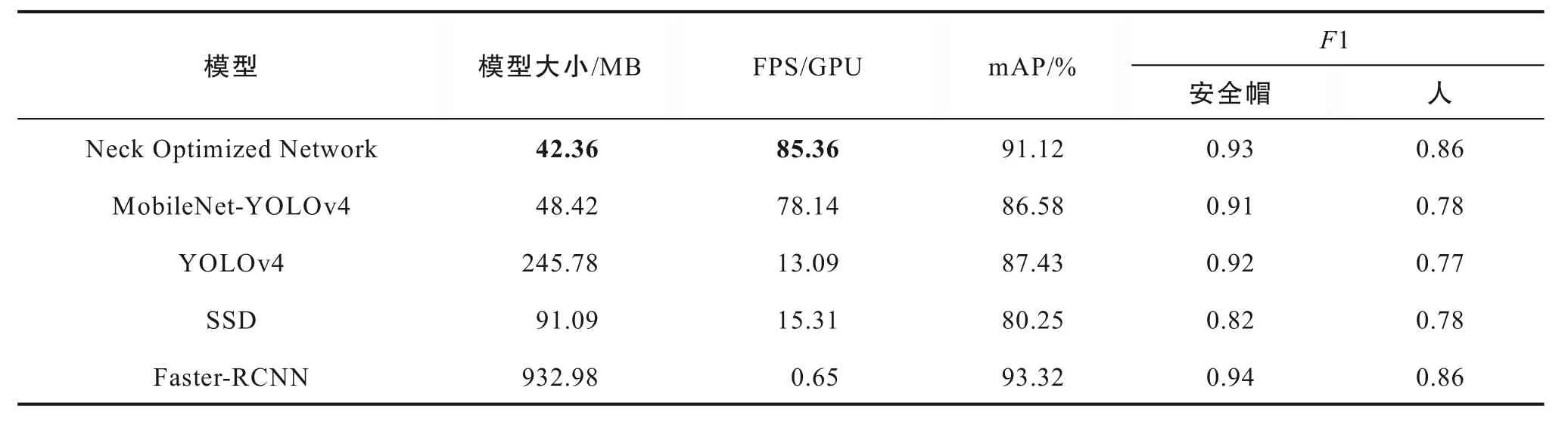
表3 不同算法在同一平台下的检测速度、平均准确率Table 3 Detection speed and average accuracy of different algorithms under the same platform
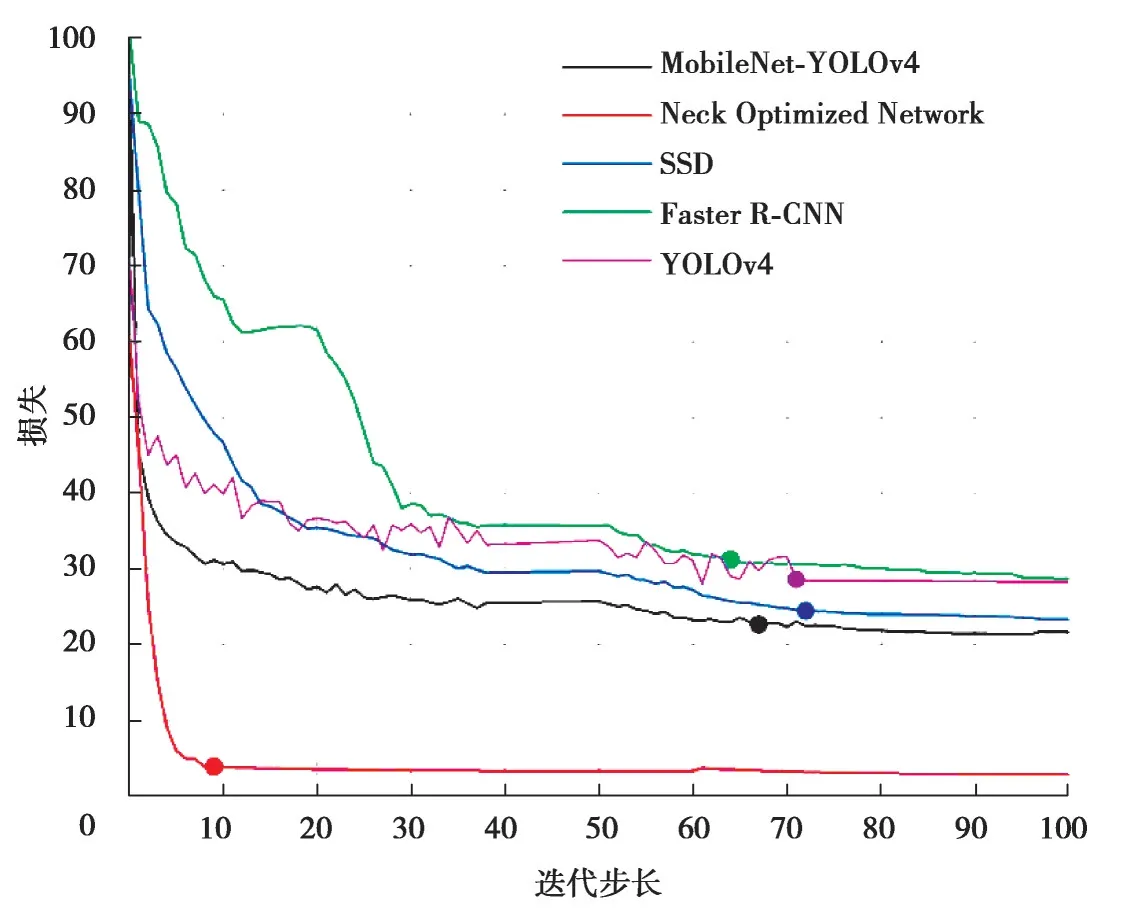
图8 各模型训练损失函数曲线图Fig. 8 Curves of training loss function for each model
分析图8,在整个训练过程中所有模型均收敛,其中基于YOLOv4 的颈部优化网络新模型具有更低的损失值,且迭代到10 步左右时,loss 均不再震荡且趋于稳定,相比于YOLOv4 模型、MobileNet-YOLOv4 等模型其收敛速度更迅速、平稳,同时基于YOLOv4 颈部优化网络新模型收敛到更低的损失值。
观察表3,Faster-RCNN 具有较高检测精度,但其检测速度缓慢,无法实时安全帽佩戴检测;YOLOv4 和SSD 算法检测速度相当,但YOLOv4 检测精度高于SSD 的检测精度;基于改进的YOLOv4 颈部优化网络新模型其模型参数量更小且平均检测精度为91.12%,检测速度达到85.36 FPS,调和平均更接近于1,该模型在检测精度和检测速度2 个方面均表现出良好的检测性能,因此选择基于颈部优化的网络新模型作为最终模型,极大提高安全帽的检测速度,使安全帽佩戴检测能够实时实现。
为了更直观展现改进的YOLOv4 颈部优化网络新模型的检测效果,选取单目标和多目标情形、小目标情形和极端小目标情形、复杂背景下的测试图像序列进行检测效果验证。图9 为单目标安全帽佩戴测试结果,图10 为多目标安全帽佩戴测试结果。分别选取在施工状态下不同姿态视角下的单目标场景以及多目标场景,对佩戴安全帽的施工人员使用蓝色框对其位置进行标注,对未佩戴安全帽的施工人员使用红色框进行标注。

图9 单目标下基于改进的YOLOv4 颈部优化网络的检测结果Fig. 9 Display of detection results based on improved YOLOv4 neck optimization network under single objective

图10 多目标下基于改进的YOLOv4 颈部优化网络的检测结果Fig. 10 Display of detection results based on improved YOLOv4 neck optimization network under multi-objective
图9、10 分别选取了在施工状态下不同姿态视角下的单目标场景、多目标场景。通常单目标图像以及无遮挡的多目标检测过程较为容易,因此基于改进的YOLOv4 颈部优化网络对单目标图像、多目标图像中均能做出正确检测,检测结果基本满足需求。
对于在夜间极端条件和含有极端小目标的情形,基于改进的YOLOv4 颈部优化网络算法与YOLOv4 算法两者检测效果差异较大,针对人员流动性大、不同光照条件、人员之间严重遮挡以及存在密集检测目标环境下的目标检测。图11-12 为2 种不同算法在极端条件下的检测效果对比图。
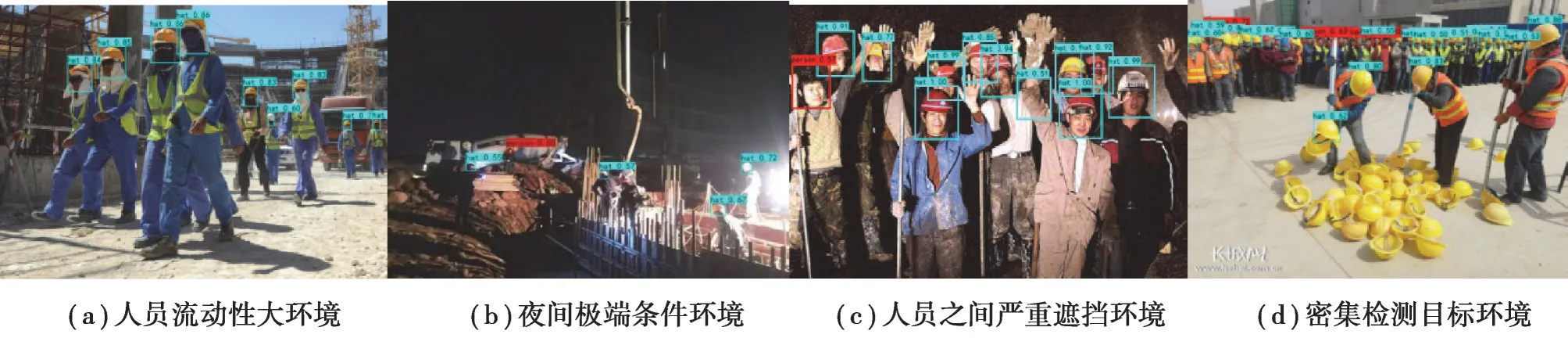
Fig. 12 Detection results based on the improved YOLOv4 neck optimization network

图11 YOLOv4 的检测结果Fig. 11 YOLOv4 test results
由图12(a)可知,在可视化条件良好,但人员流动性较大、建筑设施严重干扰的施工场所,基于颈部优化的安全帽佩戴检测算法相对于YOLOv4 检测算法,检测出了所有检测目标,未发生漏检或错检现象;如图12(b)所示,在夜间可视化条件差以及强光照射条件下,基于颈部优化下的安全帽佩戴检测算法能够检测出绝大多数目标,未发生漏检等现象;如图12(c)所示,在光照条件严重不足且各个目标之间存在严重遮挡的情况下,基于改进的YOLOv4 颈部优化网络的安全帽检测算法也能够正确检测;图12(d)可知,对于存在大量极端小目标且各个小目标之间存在严重遮挡,基于改进的YOLOv4 颈部优化网络的安全帽检测算法能够检测出绝大多数目标,表现出了优良的小目标检测性能。
3 结 语
针对安全帽佩戴检测时易受复杂背景的干扰等问题,采用YOLOv4 算法进行安全帽佩戴检测,检测精度达到86.91%,在GPU 平台下检测速度达到了13.09 FPS。但YOLOv4 算法在CPU 平台下检测速度缓慢、内存消耗大、小目标分辨率低,信息特征少等问题,引入MobileNet 网络轻量化YOLOv4、跨越模块,采用改进特征金字塔FPN 和改进注意力机制等颈部优化策略聚焦安全帽目标信息,优化网络模型在CPU 平台下检测速度达到34.28 FPS,是YOLOv4 网络的16 倍左右,同时其检测精度相比于YOLOv4 算法检测精度提升了4.21%,达到91.12%。在夜间极端条件和含有极端小目标等特殊情况下均能实现对安全帽佩戴的快速准确检测,检测性能优秀,极大提升施工作业人员佩戴安全帽的监管效率。