三维激光扫描仪若干问题的研究
2023-12-25熊爱成杨俊志叶作权
熊爱成 杨俊志 叶作权
(1.天津市陆海测绘有限公司,天津 300191;2.中国测绘科学研究院,北京 100036)
0 引言
为了准确获取被测对象的表面特征,从20世纪70 年代开始,人们就探索使用激光、投影仪和照相机来获取被测对象表面特征信息,但限于当时硬件设备性能及技术水平,直到1992 年,法国芒西(Mensi)公司才生产出了世界上第一台商用三维激光扫描仪(three-dimensional laser scanner,3DLS)Soisic(索伊斯),Soisic 激光扫描仪每秒可扫描100 个点,最大扫描范围为10 m,但经过试用,该台仪器存在太多的缺陷,无法真正投入生产实践中。1998 年,美国赛瑞技术公司(Cyra Technologies,Inc.)生产出了世界上第一台便携式三维激光扫描仪Cyrax(赛瑞克斯),Cyrax 激光扫描仪能够满足生产实践的需求,包含电池及笔记本电脑在内,质量约为40 kg,每秒可扫描1 200个点,最大扫描距离为50 m,扫描可覆盖40°(水平方向)×40°(垂直方向)的视野(field of view,FOV)[1]。
2003 年,美国天宝导航有限公司(Trimble Inc.)收购了Mensi 公司,生产出了最大扫描距离达200 m 的Trimble(Mensi)GS200[2]。Trimble 公司当前的最新产品Trimble TX8,其最大扫描距离达340 m,每秒最多可以扫描100万个点[3]。
2000 年11 月,Cyra 公司与徕卡测量系统(Leica Geosystems)合并,生产出了扫描距离达250 m 的三维激光扫描仪Cyrax 2500(Leica HDS2500)[4]。Leica 公司当前的最新产品Leica RTC360,其最大扫描距离达130 m,每秒最多可以扫描20万个点[5]。
除Trimble 公司、Leica 公司生产三维激光扫描仪外,还有德国措勒尔-弗伦利希有限公司(Zoller &Fröhlich GmbH)生产的Z+F 系列三维激光扫描仪、美国法如科技有限公司(FARO Technologies,Inc.,FARO)生产的FARO 系列三维激光扫描仪、奥地利瑞格激光测量系统有限公司(RIEGL Laser Measurement Systems GmbH)生产的RIEGL 系列三维激光扫描仪等。三维激光扫描仪已经在林业、冶金、汽车、电子、机器人导航、考古、建筑、电影娱乐、道路设计及建设、测绘等行业中得到了广泛的应用[6]。
1 三维激光扫描仪的测距原理
三维激光扫描仪的基本测距方法可以分为:三角测距法、脉冲测距法和相位测距法。脉冲测距法亦称为时间差(time of flight,TOF)法,相位测距法与时间差法本质上是一致的,只是把测量测距信号的往返时间转换成为测量测距信号的相位延迟而已。
1.1 三角测距法
三角测距法的原理如图1所示。激光光源发射的激光照射到被测物体后,经棱镜组成像至电荷耦合器件(charge-coupled device,CCD)/位置敏感探测器(position sensitive detectors,PSD)上,CCD/PSD 传感器获取激光光斑的位置变化值Δz,则可以按照计算出被测物体的位移量ΔZ,即
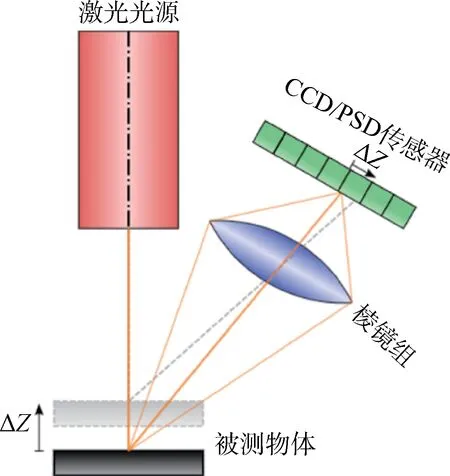
图1 三角测距法测量原理示意[6]
式中,K为仪器的转换参数。
当采用面阵CCD/PSD 传感器时,则可以测量出被测物体的三维坐标,更为详细的公式推导可以查阅文献[7]。
1.2 脉冲测距法
脉冲测距法的基本原理如图2所示。
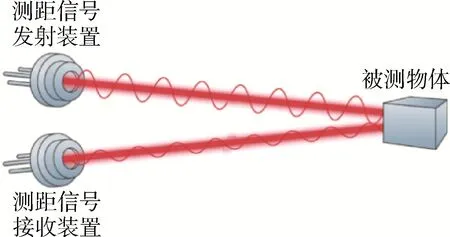
图2 脉冲法测距的基本原理
由图2 可以看出,测距信号发射装置发射的测距信号由被测物体反射后,仪器接收装置接收到该测距信号,设测距信号往返仪器与被测物体之间的时间为t,则仪器与被测物体之间的距离d为
式中,c为测距时的实际光速值,由真空中的光速值c0=299 792 458 m/s、温度及大气压力计算出。
夏天一身汗、冬天一身霜,晴天一身土、雨天一身泥。简短几句话道出了养路工作的艰辛。他虽然身在中层领导岗位,仍然保持着养路工人的作风。为了保证公路通畅,他同养路工人们一样,冬天,不畏严寒,除雪保畅;夏天,不惧酷暑,奋战一线,真心守护着公路,挥洒着青春和汗水。夏季工作,他迎着初升的太阳,上路巡检,安排工人处置病害。中午气温达到零上30多度,汗水浸透了橘黄色的工作服,艰难困苦并没有吓倒他,他带领工人们以苦为乐、以路为业,用忘我的奉献精神战胜了困难,铺平了道路。工作带给他无尽的欢乐,丰富了他奋进的心灵,鞭策他更加奋进、更加执著。
1.3 相位测距法
假定测距信号往返仪器与被测物体之间的相位差为φ,对于波长为λ的测距信号,有
式中,N为测距信号的个数为不足一个波长的尾数。
对于频率为f的测距信号,则有
将式(4)带入式(3),可得
由于仪器无法直接测量测距波长的个数N,只能够测量不足一个波长的相位差Δφ,为了确定式(5)中的d,一般情况下是采用不同波长的测尺来测量同一段距离,最后进行组合来消除式(5)中的不确定性。
为了利用相位测距法与脉冲测距法的优点,有的仪器将这两种方法组合在一起,这样就获得了测程长、精度高的结果。
2 三维激光扫描仪的分类
三维激光扫描仪的分类方式有多种,按照测距方式分,可得到本文第1 节所列的3 种;按照测距远近分,则可为长程、中程和短程;也可以按照载体方式对三维激光扫描仪进行分类的。载体方式分类便于设备搭载多种传感器,也便于更加清晰地制定测量规范,本文采用载体方式进行分类。
2.1 动态三维激光扫描仪
如果将激光扫描仪、全球卫星导航系统(global navigation satellite system,GNSS)接收机、惯性测量装置(inertial measurement unit,IMU)等传感器安置到卫星、飞机、直升机、汽车、气球、自行车等载体上,可以构成动态三维激光扫描仪(mobile laser scanner,MLS)。GNSS 接收机用来测量激光扫描仪的位置,IMU 用来测量激光扫描仪的姿态,通过对这些传感器获取的原始数据进行计算,就可以获得被测物体表面的三维坐标。图3 为动态激光扫描仪示意图[8]。动态三维激光扫描仪亦称为激光雷达(light detection and ranging,LiDAR)。

图3 动态三维激光扫描仪
2.2 静态三维激光扫描仪
如果将激光扫描仪安置到三脚架等固定装置上,则可以构成静态三维激光扫描仪(static laser scanners,SLS)。一般情况下,静态三维激光扫描仪装载有角度传感器,在测量目标的距离时,可以同时测量出水平角及竖直角,地面激光扫描仪(terrestrial laser scanner,TLS)就是SLS 的典型代表,图4 为地面激光扫描仪的示意图。地面激光扫描仪测量仪器与被测物体之间的距离S、水平角α、竖直角θ,则目标点P(x,y,z)的坐标为

图4 地面激光扫描仪[9]
2.3 手持式三维激光扫描仪
如果激光扫描仪体积小、质量轻,作业人员能够手持这种仪器进行工作,这类三维激光扫描仪称为手持式三维激光扫描仪(handheld laser scanners,HLS),HLS 通常也称为手持式可移动地面激光扫描仪(handheld mobile terrestrial laser scanning,HMTLS),图5 为加拿大形创有限公司(Creaform Inc.)生产的手持式三维激光扫描仪。

图5 手持式三维激光扫描仪[10]
3 三维激光扫描仪当前面临的问题
3.1 检定规范的问题
三维激光扫描仪作为获取被测对象特征及尺度的仪器,其精度及可靠性决定了获取成果的质量。虽然仪器生产厂家标称了仪器的精度指标,但还需要按照一定的规范进行检定。目前对于动态三维扫描仪采用的方法是在一定的区域布设标志点,用其他方法首先测量出这标志点的坐标,然后再用动态三维激光扫描仪对这些标志点进行扫描,求取动态三维激光扫描仪获得的坐标,比较二者的差异;对于静态激光扫描仪,则是按照全站仪的检定方法,对其测距、测角精度进行检定;对应手持激光扫描仪,则是按照坐标测量机(coordinate measuring machine,CMM)检定方法进行检定的。很显然,现有的这些方法很难评价包括激光扫描仪、GNSS 接收机、惯性测量装置等多传感器获取的数据质量,因此,依据三维激光扫描仪的特点,制定出合适的规范对多传感器获取的数据进行评价,是一项具有重要意义的工作。
3.2 多路径问题
当测距信号投射到墙角、阶梯、植被等场景时,会产生多路径问题。图6 为测距信号穿过树时,测距信号的反射情况,图7为测距信号投射到墙角产生的多路径效应。如何消除测量数据即点云(point cloud)中的多路径效应。
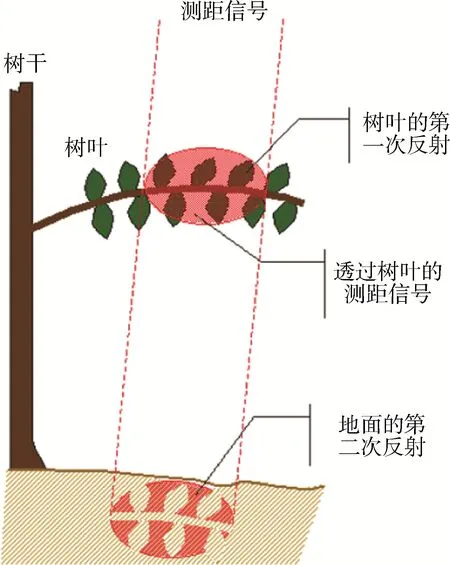
图6 测距信号穿过树枝产生的多路径效应[11]

图7 测距信号投射到墙角产生的多路径效应[12]
为消除三维激光扫描仪数据中存在的多路径效应,可以从如下两方面进行改进:
(1)开发新的测距方法如全波形测距法、多光谱测距法[13-14]来获取更为丰富的原始数据,使多路径信息尽可能多地体现在原始观测数据中。
(2)采用如八叉树的分裂合并(octree splitting and merging,OSM)算法、随机采样一致性(random sample consensus,RANSAC)算法[15-16]等新算法对点云数据处理,来消除原始观测数据中的噪声,达到消除多路径效应的目的。
3.3 被测物体表面的反射率问题
当测距信号投射到玻璃墙、不锈钢表面、凹凸的地面、低反射率的沥青路面时,这些材质将会对测距信号严重的影响,有时候还可能获得不了测量结果,产生数据黑洞(data blackholes,DBH),数据黑洞亦称为数据空洞(data gaps,DG)。目前主要采用恰当的算法对点云数据进行处理,恢复被测对象的实际情况。
4 三维激光扫描仪的应用前景
随着三维激光扫描仪的体积越来越小,功能越来越多,其应用前景必定会越来越广,主要体现在:
(1)三维激光扫描仪可以采集海量的数据,需要花费大量的数据对这些数据进行处理,满足不了实时测量在线测量的需求,一种可行的方案是将三维激光扫描仪采集的数据上传至云服务器,由云服务器对采样数据进行处理,然后再将处理结果发回至三维激光扫描仪,实现在线测量。
(2)与同步定位与地图构建(simultaneous localization and mapping,SLAM)技术相结合,实现对陌生、危险环境的探测。在室内或隧道、洞穴、矿井或具有潜在危险的建筑物中使用三维激光扫描仪进行测量时,由于仪器无法接收GNSS的卫星信号,无法实时确定三维激光扫描仪的位置,但采用SLAM 技术,可以构建这些未知环境的地图,同时使用构建的地图进行导航,实现对这些陌生环境的测量。
(3)多传感器数据融合。除了可以将三维激光扫描仪安装在无人机(unmanned aerial vehicle,UAV)上外,还可以在UAV 上装载超声波测距仪(ultrasonic distance measuring instrument,UDMI)、视觉相机及IMU,从而实现快速、精确获取被测对象的详细信息,满足生产实践的需求。
(4)与增强现实(augment reality,AR)或者虚拟现实(virtual reality,VR)技术结合,实现对被测对象的三维立体展示。
5 结束语
三维激光扫描仪凭借其高效率、高精度、非接触性和易使用等优点,在国民经济的很多行业得到了初步应用,实现了满足生产实践的多种需求。但是,由于缺乏权威统一的检定标准、功能齐全的应用软件,这使得三维激光扫描仪的应用处于碎片化、各自为政的局面。为更好地发挥三维激光扫描仪的独特优势,促进三维激光扫描仪在更广泛的范围内使用,需要尽快解决以下问题:①按照分类指导的原则,针对不同类型的三维激光扫描仪制定相应的检定规范,用以规范仪器精度的检定;②深入研究不同反射介质对三维激光扫描仪的影响,并制定相应的作业方案,规避由反射介质对测量成果的影响;③进一步优化数据处理软件,完善数据处理软件的功能,以满足各种生产实践的需要。
