基于SBAS-InSAR技术的大坝形变探测与监测
2023-12-25徐晓新毛洪孝兰丽景
徐晓新 毛洪孝 兰丽景
(1.衢州市国土空间规划设计研究院柯城分院,浙江 衢州 324000;2.浙江振邦地理信息科技有限公司,浙江 衢州 324000)
0 引言
大坝的安全运营[1]会影响大坝本身机构与水轮发电装置,还会影响下游居民的生命财产安全[2-3]。大坝投入使用后,受自身与外界环境的影响,会出现一定程度的形变[4-5]。微小形变不会影响大坝的运营状态,当形变较大情况下,便会影响大坝的安全运营[6]。为此,实时监测大坝形变情况意义重大。
例如,杨传训等[7]根据黄龙带水库大坝两期高精度三维激光大坝扫描点云数据,提出基于正态分布的点云数据配准算法、改进原始渐进加密三角网滤波算法,运用点到面形变量对比分析模式监测大坝形变量,完成大坝形变监测。但该方法需要高质量的大坝历史数据,当大坝历史数据质量较低时,则该方法的形变监测效果较差。何子鑫[8]基于SBAS-InSAR 技术的坝体形变获取方法,根据获取的坝体形变信息,分析了大坝不同位置的形变特征及坝体形变与库区水位变化的周期性规律,缩短监测时间。该方法虽然能够有效获取大坝的形变信息,但易受时空与大气效应的影响,降低大坝形变监测精度。
多基线干涉合成孔径雷达(small baseline subset-interferometric synthetic aperture radar,SBAS-InSAR)技术结合了InSAR 技术全天候、全天时与高精度等优势,以及SBAS 不受时空与大气效应影响的优势,可提升形变监测效果[9-12],同时该技术并不需要高质量的大坝影像数据,便可高效精准地完成大坝形变监测。为此,研究基于SBAS-InSAR 技术的大坝形变探测与监测方法,实时掌握大坝的运营状态。
1 大坝形变探测与监测
1.1 大坝差分干涉相位图的滤波处理
经过组建的M幅大坝干涉相位图内,包含大量噪声,不利于后续大坝形变的探测与监测。为此,利用改进的Goldstein 滤波算法,滤波处理大坝差分干涉图,去除干涉图内部噪声[13],具体步骤如下。
(1)令大坝差分干涉图是I(x,y),其中,大坝差分干涉图像素位置是(x,y)。通过二维傅里叶变换处理I(x,y),将空间域信号变更成频率域[14-15],得到大坝的干涉小区域I′(u,v)。
(2)卷积运算I(x,y)的矩形平滑窗口与局部功率谱Q(u,v),并实施非线性变换处理[16-17],获取滤波器Z(u,v)。
(3)傅里叶逆变换,获取滤波后的大坝差分干涉图,公式为
式中,s是滤波因子。
大坝差分干涉图内相干值的绝对值|γ|的函数为
式中,大坝差分干涉图的相干系数是γ;欧拉算法是Li2();矩形滤波窗口均值是δφ。
1.2 大坝差分干涉相位图的相位解缠
在区域增长法内,引入最小不连续阈值,对其进行改进,可提升大坝差分干涉相位图的相位解缠效果[18]。因此,利用最小不连续的区域增长解缠算法,对1.1 小节滤波后的大坝差分干涉相位图进行相位解缠。令大坝滤波后大坝差分干涉相位图内随机像元(x,y)处的包裹相位是θx,y,展开相位是ψx,y。ψx,y的计算公式为
式中,cx,y为包裹数;ρ为修正系数。
(x,y)处的垂直与水平方向的跳跃数αx,y、βx,y为
式中,Int(·)代表最接近的整数。
在式(4)内添加式(3)获取公式为
最小不连续算法的目标是以变更跳跃数的方式,令η降至最低,获取最小不连续阈值。
高相干点相位解缠的具体步骤如下:
(1)在滤波后的大坝差分干涉相位图内,选取质量较优的种子,以其为起点[19-20]。
(2)求解已展开的像素点附近的最小不连续阈值,通过式(3)对最小阈值对应的像素点实施相位展开。
(3)通过多个方向的信息,展开各像素点,避免因单个方向信息展开像素点出现偶然误差情况。
(4)通过最小不连续阈值,确定像素点相位展开过程,确保每次展开的像素点均是最小不连续阈值点。
(5)在区域生长重合情况下,需以路径连接的方式,融合重合的生长区域,确保像素点解缠相位的连续性,完成大坝差分干涉相位图的相位解缠。
1.3 大坝差分干涉图的高相关点选取
对于1.2 小节相位解缠的大坝相位解缠图,通过相干系数阈值法,可有效剔除时间去相干导致的随机散射相位问题。在大坝相位解缠图内,选择高相干点是指自身的散射特性波动性较小,同时不会根据时间的变化而变化。
通过相干性衡量大坝相位解缠图内的主辅影像间相关程度的物理量。大坝相位解缠图的相干系数计算公式为
其中,大坝相位解缠图的空间矩形窗大小是(2m+1)(2n+1);代表取共轭(·)*;大坝相位解缠图内主图像数据是g1;辅图像数据是g2。
将全部符合式(8)的像元定义为被选择的高相干点,公式为
式中,εa、εb是相干系数阈值;γ的最小值与均值为γmin、γmean。
1.4 大坝形变探测与监测的高程测量估计数学模型构建
依据1.3 小节选取的高相干点,构建大坝形变探测与监测的高程测量估计数学模型。令大坝相位解缠图内高相干点o的干涉相位是ξ(o),计算公式为
大坝形变探测与监测的高程测量估计数学模型为
式中,系数矩阵是D(M×N),D内各行数值为每个大坝解缠相位图,各列数值为原始大坝影像;N幅大坝影像内待求形变相位建立的矩阵是ξ;M幅大坝相位解缠图内;高相干点干涉相位组建的矩阵是Δξ。
因为M≥N,所以D的秩是N,利用最小二乘法求解式(11)得到
式中,D的广义逆矩阵是D*;转置符号是T;(·)-1代表求逆运算。
利用奇异值分解法,求解式(10),公式为
式中,DTD内M×M的正交矩阵是U;DTD内M×N的正交矩阵是R;DTD内对角线元素的对角矩阵是C。令D的秩是H,则DTD的前H个特征值不是0,其余特征值均是0。因此式(12)可变更为
式中,C内第l个元素是ϖl;U与R内第l个元素是ul、rl。
式中,G(j′,B)是0 的矩阵是G。通过奇异值分解法计算G,可获取υ的最小范数解,在求解大坝形变探测与监测的高程测量估计数学模型时,需考虑DEM误差,Δς的求解结果为
2 实验分析
以某地区的水电站大坝为实验对象,该水电站大坝属于一级建筑物,装机容量是430万千瓦,发电量接近186.5万千瓦。该水电站大坝的主要功能是发电,还具备防洪与灌溉等功能。该大坝的拱坝坝顶高程约1 255 m,最大坝高约295 m,拱冠梁宽约15 m,最低建基基面高程约955 m。该大坝的水库容量在1.55×1010m3左右,调节库容量在1.02×1010m3左右。利用Sentinel-1A 卫星搭载C 波段合成孔径雷达,采集该大坝的影像数据,该大坝的部分影像数据如图1所示。

图1 大坝的部分影像数据
根据图1 可知,C 波段合成孔径雷达采集的大坝影像数据清晰度较高。
设置时间基线阈值是100 d,垂直有效基线阈值是100 m,依据设置的时间基线阈值,在采集的大坝影像数据内,选择符合要求的大坝影像,符合要求大坝影像数据的时空基线分布情况如图2所示。

图2 时空基线分布情况
根据图2 可知,本文方法可有效按照设置的时间基线阈值,选择符合要求的大坝影像数据,选择的大坝影像数据内,时间基线控制在100 d,符合设置的时间基线阈值要求,垂直有效基线均在100 m 以内,符合垂直有效基线阈值要求。按照选择的大坝影像数据时间基线点,对其进行两两相连,组成大坝差分干涉相位图对,大坝差分干涉相位图对组成情况如图3所示。

图3 大坝差分干涉相位图对组成情况
由图3 可知,依据符合要求的大坝影像数据时间基线,共组成27 幅大坝差分干涉相位图对。实验证明:本文方法可有效生成大坝差分干涉相位图对。
在27幅大坝差分干涉相位图对,随机选择一幅大坝差分干涉相位图,利用本文方法对其进行滤波处理,本文方法的滤波效果如图4所示。
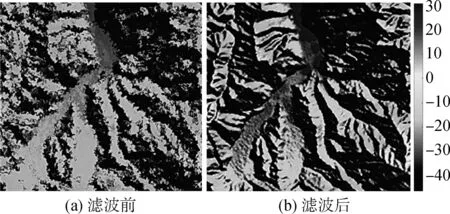
图4 滤波前后的大坝差分干涉相位图
根据图4(a)可知,滤波器前大坝差分干涉相位图内,包含大量噪声点,无法为后续大坝形变探测与监测,提供精准的数据支持;根据图4(b)可知,滤波后的大坝差分干涉相位图内,噪声点明显减少,可清晰呈现大坝的细节信息。实验证明:本文方法可有效滤波处理大坝差分干涉相位图,去除差分干涉相位图的内部噪声,提升其清晰度。
利用本文方法对滤波后的大坝差分干涉相位图进行相位解缠,相位解缠结果如图5所示。
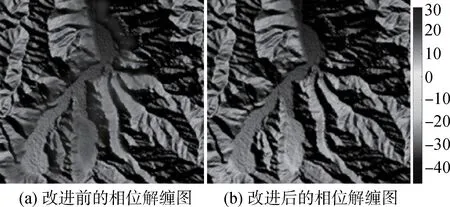
图5 大坝差分干涉相位图的相位解缠结果
根据图5(a)可知,改进前的大坝差分干涉相位图的相位解缠结果中,包含大量大气误差;根据图5(b)可知,本文方法改进后的大坝差分干涉相位图的相位解缠结果中,仅包含少量的大气误差,可明显提升相位解缠效果。实验证明:本文方法可有效相位解缠大坝差分干涉相位图,且相位解缠效果较优,仅存在少量的大气误差。
利用本文方法在大坝相位解缠图内,选择高相关点,用于建立大坝形变探测与监测的高程测量估计数学模型,高相干点选择结果如图6所示。

图6 高相干点选择结果
由图6 可知,本文方法可有效在大坝相位解缠图内,选择高相干点,数量为56 个。本文方法选择高相关点,主要集中在河流附近,高相关点的分布密度较高;其他地方的高相干点较少,分布密度较小。
在该大坝的左边与右边各选择一个监测点,利用本文方法在选择的高相关点上,建立大坝形变探测与监测的高程测量估计数学模型,分析这两个监测点的大坝形变情况,结果如图7所示。
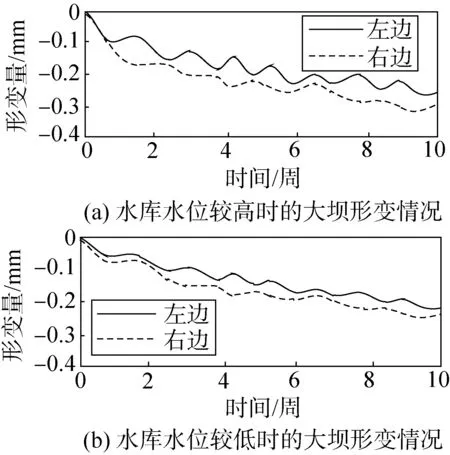
图7 不同水位时的大坝形变探测与监测结果
由图7(a)与图7(b)可知,不同水库水位时,随着时间的延长,大坝左右两边的形变量均呈上升趋势。根据图7(a)可知,当水库水位较高时,大坝左边的形变量较小,大坝右边的形变量略大于左边。根据图7(b)可知当水库水位较低时,大坝整体形变趋势与水库水位较高时的变化趋势非常接近,但整体形变量明显低于水位较高时的形变量;原因是大坝长时间受到上游较高水位的压力,导致大坝出现向下游的位移,即大坝形变量较大。实验证明:本文方法可有效探测与监测大坝形变。
3 结束语
传统大坝形变监测方式是操作人员通过测距仪与经纬仪,观测并记录各监测点的位置,完成形变监测,该方式需要操作人员具有丰富的工作经验,且监测成本较高,无法大面积监测大坝形变。为此,利用SBAS-InSAR 技术的大区域、高精度等监测优势,研究基于SBAS-InSAR 技术的大坝形变探测与监测方法,精准探测与监测大坝形变量,为维护大坝安全运营提供参考。
