激光雷达的立体体元模型在森林冠层间隙率提取中的应用
2023-12-25曹庆安何原荣
曹庆安 冷 鹏,2 何原荣
(1.江西省核工业地质调查院,江西 南昌 330038;2.福州大学 空间数据挖掘与信息共享教育部重点实验室,福建 福州 350116;3.厦门理工学院 数字福建自然灾害监测大数据研究所,福建 厦门 361024)
0 引言
森林是陆地生态系统重要组成部分,具有调节气候、保持水土、防风固沙等多种功能。叶面积指数(leaf area index,LAI)是描述森林冠层结构的重要参数之一,控制着森林冠层的光合作用、呼吸作用等多种生物物理过程[1-2]。而LAI 的计算一般通过冠层间隙率进行反演,为此,准确有效地估算森林冠层间隙率对准确反演LAI具有重要的意义。
森林冠层间隙率的定义是指一束光沿一定的方向照射在森林冠层,未被森林冠层阻挡的概率。目前常用的测量方法有:半球成像(digital hemispherical photography,DHP)、植物冠层叶面积指数测量仪、跟踪辐射和冠层结构测量仪(tracing radiation and architecture of canopies,TRAC)、DCP(digital cover photography)、多光谱冠层成像仪(multi-spectral canopy imager,MCI)等,这些方法受天气的影响均较大[3-7]。而激光雷达(light detection and ranging,LiDAR)作为一种新型遥感技术,有全天候作业、受天气影响小、精度高的优势,越来越多的学者将激光雷达点云数据运用于森林冠层间隙率提取[8-10]。如CHEN Y 等人基于激光雷达回波强度信息来反演间隙率,但该方法受回波强度校正精度的影响较大;ZHENG G 等人提出采用点云投影方法将3D 点云投影成2D 图像提取间隙率,但该方法受采集数据缺失程度影响较大[11]。因此,本文基于激光雷达点云数据,提出一种立体体元模型法进行间隙率提取,该方法主要分为两部分,一是通过设置体元大小,构建以体元为介质的森林场景,然后通过半球成像原理,生成光线集合,采用光线跟踪算法,对光线与体元进行求交运算,最后根据生成的光线输出DHP影像;二是根据生成的DHP影像,统计各个天顶角区间的黑白像素与空白像素,从而求得各个天顶角区间的间隙率。
1 理论与方法
1.1 半球成像方法
半球成像方法是采用极化投影方式生成,极化投影采用式(1)计算,其基本原理如图1 所示,O为光源点,点C为成像平面的任意点有一条光线与其对应,点B为点C在半球S上对应的投影点,则点C对应的出射光线为OB,ϕ为光线OB的方位角,θ为光线OB的天顶角,D为C到O的距离,R为成像平面半径[12]。

图1 半球成像原理
1.2 点云投影方法
点云投影方法是通过模拟半球成像方法的原理生成DHP 影像,然后基于生成的DHP 影像提取森林冠层间隙率。基本原理如下:先对采集的单站点云数据设置投影中心点与生产的DHP影像大小,从而构建像平面;然后将所有点云利用极化投影方法计算各个点云投影后对应像素,并对该像素赋值;最后根据像素值生成对应的影像[13]。
1.3 立体体元模型方法
立体体元模型方法的基本原理是基于点云数据,构建体元为介质的虚拟森林场景,然后基于虚拟森林场景采用光线跟踪算法进行DHP 影像模拟,最后基于DHP 影像提取间隙率。具体原理:首先将计算样地所有点云数据的最小包围盒;然后根据设定的体元大小将最小包围盒体元化,并计算体元内是否包含点云数据,将所有不包含点云数据的体元剔除,保留包含1 个点云数据以上的体元构建森林场景;然后基于构建的森林场景,并根据半球成像原理,将成像平面每个像素生成光线集合,采用光线跟踪算法进行光线与体元相交计算,最后根据光线求交结果生成对应的DHP影像。
1.4 间隙率计算方法
本文间隙率计算方法是基于DHP 影像,采用图像处理技术,统计各个天顶角区间总像素与黑白像素数量,然后根据式(2)计算各个天顶角方向间隙率[14]。
式中,θ为天顶角;Pgap(θ)为θ天顶角区域对应的间隙率;Nblank(θ)为θ天顶角区域空白像素个数;Nsum(θ)为θ天顶角区域像素总数。
2 数据采集与处理
2.1 数据收集与预处理
本文实验样地在河北承德塞罕坝森林公园,样地树种为落叶松,样地内单树随机分布。实验样地大小为25 m×25 m,点云数据采样点均匀布设在样地中,共布设16 个采样点,每个采样点间隔5 m。数据采集使用Riegl VZ-400地面扫描仪,扫描角分辨率为0.04°,测站高为1.2 m,每个采样点均采集0°和90°姿态,点云数据采集时需要无风。DHP 数据使用Canon 6D 相机搭配Sigma 8 mm鱼眼镜头进行采集,采样点与点云数据采样点一致。
点云数据的处理主要包括配准与去噪,各个测站点云数据使用RiSCAN Pro 软件进行配准,以其中一个测站为基准站,先使用反射片模式配准,对不能使用反射片配准的测站,通过手动选择同名点进行配准,配准中最大误差为3.8 mm。配准后,需要进行去噪处理,先采用RiSCAN Pro软件中的Deviation 去噪功能,设置去噪阈值进行噪点删除,对于少量剩余零散的噪点,采用手动删除[15]。
外业实地拍摄的DHP 影像数据需要进行裁剪、阈值化处理[16],先通过Photoshop 将图像进行有效区域进行裁剪,然后英语伽马校正与阈值化将影像进行分类,处理前后图像如图2所示。

图2 DHP影像处理前后对比图
2.2 基于点云投影的DHP模拟
根据1.2 节中点云投影方法的基本原理,该方法图像模拟具体流程如图3所示。首先加载去噪后的单站点云数据,计算每个点云的方位角与天顶角;其次设置模拟影像的分辨率与投影中心坐标,生成像平面;然后计算每个点云到成像中心点距离以及投影后对应的位置与像素;最后遍历完成所有点云数据,生成DHP 影像,生成的DHP影像如图4所示。

图3 点云投影方法模拟DHP影像流程图

图4 点云投影DHP影像
2.3 基于立体体元模型的DHP模拟
立体体元模型方法与点云投影方法存在较大差异,该方法采用16 个测站配准后的点云数据,由于数据量大,计算量巨大,本文调用点云库(point cloud library,PCL),构建八叉树数据结构进行加速,同时模拟DHP 影像的采样方案与实地采集点云的采样方案一致,共16 个采样点,模拟高度为1.2 m,DHP 影像分辨率3 000 像素×3 000像素,根据相关文献的研究成果与实验测试,本文设置4 种体元大小,分别为0.004、0.006、0.008、0.01 m。
根据1.3 节中立体体元模型方法的基本原理,进行DHP 影像模拟,具体流程如图5 所示。先加载所有已配准、去噪的点云数据,计算森林样地点云数据最小包围盒;然后根据最小包围盒与设置的体元大小,构建立体体元,并判断体元内是否包含1 个及1 个以上的点云,剔除不包含点云的体元,将包含点云的体元构建森林场景;其次,根据模拟相机参数,将每个像素生成一条光线,并将每条光线初始颜色赋值为白色,即(0,0,0);在光线赋值后,采用光线跟踪算法,追踪每条光线是否跟虚拟森林场景是否有相交,对有相交的光线,将其颜色值修改为黑色,即(255,255,255),最后根据每条光线颜色值(即像素值)生成DHP 影像,如图6 所示。

图5 立体体元模型方法模拟DHP影像流程
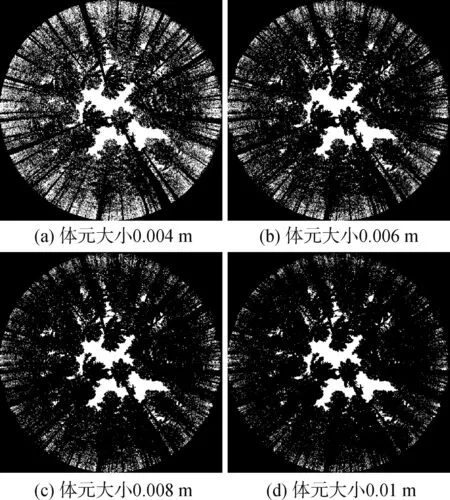
图6 基于立体体元模型方法模拟的DHP影像示意图
3 结果与讨论
3.1 结果
基于模拟的DHP 影像,采用1.4 节所述方法提取间隙率,采用立体体元模型方法提取的不同体元大小的间隙率结果如图7所示。通过图中可以发现,不同体元大小提取的间隙率整体走势基本一致,立体方法提取的间隙率结果在天顶角0°~75°,呈现逐渐减小的趋势,在天顶角75°~90°时呈上升再下降的趋势。随着体元大小的增大,提取的间隙率也逐渐减小,且差异在小天顶角区域较小,在大天顶角区域较大。

图7 不同体元大小下提取的间隙率
为验证立体体元模型方法的可行性,本文引入点云投影与DHP 两种较为常用的间隙率提取方法进行分析对比,对比结果如图8 所示。通过图中可以发现,三种方法提取的森林冠层间隙率整体走势大致相同,点云投影方法提取的间隙率结果均是随着天顶角的增大,逐渐减小,直到天顶角80°以后,趋于稳定。立体体元模型提取结果与DHP、点云投影方法提取的结果在大天顶角(80°以上)区域存在较大的差异。
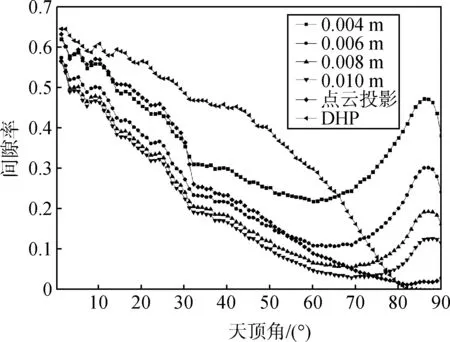
图8 不同方法提取的间隙率对比
在Miller 提出的总面积指数计算模型中,主要采用了0°~90°、0°~80°、10°~65°三种天顶角区间提取的间隙[4],为此本文分别对该三种天顶角区间提取的间隙结果与DHP 方法提取结果进行相关性分析,相关系数如表1、表2 所示。在点云投影方法中,三种天顶角区间下提取的间隙率均与DHP方法有较高的相关性,相关系数均在0.91以上;立体体元模型方法与DHP 方法相比,在三种天顶角不同的区间下,随着体元大小的增加,相关性也不断增加,且当天顶角区间在10°~65°时,4种体元大小下提取的结果相关性均较高,在0.92 以上。而立体体元模型方法与点云投影方法相比时,当考虑整个天顶区域时,随着体元大小的增加,相关性也不断提高;而当在天顶角在0°~80°与10°~65°两个区间段时,具有较高的相关性,相关系数在0.91以上。

表1 与DHP方法结果的相关系数

表2 与点云投影方法结果的相关系数
3.2 分析与讨论
立体体元模型法通过16个测站点云配准后,因各个测站之前遮挡情况不一样,可以有效地弥补各个测站之间因冠层遮挡引起的点云数据缺失问题,使得获取的森林点云数据更为完整。但各个测站之间配准都有一定的误差,特别是多测站存在误差累积,这些误差都会影响间隙率的提取。DHP 方法是目前提取间隙率较为成熟、使用较多的光学方法,该方法主要受DHP 采集时相机曝光度影像,在天顶方向容易曝光过渡,而在大天顶角区域容易曝光不足,从而使得提取的间隙率精度不高。点云投影的方法是通过单站扫描的点云投影生成的DHP 影像,该方法容易受冠层、单树之间的遮挡的影响,同时由于激光在不同的距离采样精度不一样,可能导致获取的森林点云数据缺失较多。当采用立体体元方法时,由图6 可知,当体元大小越小时,在大天顶角区域,由于数据的不完整,导致存在较多的小间隙,使得体元越小时,与DHP 方法的相关性越低,这是由于在激光束角分辨率一定时,随着距离越远,采集的点云数据越稀疏,为此,当体元大小越小时,大天顶角区域存在较多间隙;而当体元大小一定时,随着使用的天顶角区间不一样,提取的间隙率结果与DHP 的相关性也不一致,天顶角在10°~65°时,相关性最高,这是由于在该天顶角区间,两种方法提取的间隙相差较小,且走势基本一致,均为随着天顶角的增加,间隙率逐渐减小。因此,本文使用的立体体元模型法可用于森林冠层间隙提取。
4 结束语
间隙率是森林冠层重要的结构参数。本文以25 m×25 m 的落叶松林为实验样地,在样地内均匀布设了16个采样点进行激光雷达数据采集,从而开展基于激光雷达森林冠层间隙率提取方法研究。本文采用一种立体体元模型方法,基于立体体元模型构建的虚拟森林场景,利用光线跟踪算法与八叉树数据结果来模拟DHP 影像开展间隙率提取,共设计了4 种体元大小(0.004 m、0.006 m、0.008 m、0.01 m)下的虚拟森林场景间隙率,分0°~90°、0°~80°、10°~65°三种天顶角区间与DHP、点云投影两种常用的间隙率提取方法进行分析对比,结果发现立体体元模型法与DHP、点云投影两种方法结果整体趋势基本相同,有较高的相关性,该方法可用于森林冠层的间隙提取。
