经腋窝机器人辅助腔镜甲状腺手术:单中心实践经验总结
2023-12-22史荣亮倪兆娴王宇孙国华渠宁刘婉琳马奔王玉龙魏文俊向俊嵇庆海
史荣亮,倪兆娴,3,王宇,孙国华,渠宁,刘婉琳,马奔,王玉龙,魏文俊,向俊,嵇庆海
(1.复旦大学附属肿瘤医院 头颈外科,上海 200032; 2.复旦大学上海医学院 肿瘤学系,上海 200032; 3.复旦大学附属闵行医院 普通外科,上海 201199)
2007 年,Kang 等[1]第一次将机器人手术应用于甲状腺,之后机器人甲状腺手术在全球范围内开展。美国甲状腺协会(American Thyroid Association,ATA)及中国医师协会外科分会甲状腺外科医师委员会(Chinese Thyroid Association,CTA)分别出版了有关机器人甲状腺手术的专家共识或指南,进一步规范了机器人甲状腺手术的适应证、禁忌证及术中注意事项[2]。因为甲状腺没有天然的腔隙,因此机器人手术的入路种类繁多,包括单纯腋窝入路(transaxillary approach,TAA)、经双侧腋窝乳晕入路(bilateral axillary breast approach,BABA)、经耳后入路(retroauricular approach,RAA)及经口腔前庭入路(transoral robotic thyroidectomy vestibular approach,TORTVA)等,其中BABA 和TAA 在全世界范围内应用最广,各种手术入路均各有优缺点。笔者所在中心从2020 年3 月份起开展实施达芬奇机器人甲状腺手术,至今已经完成超过500 例,主要的入路为TAA 方式,在手术过程中,笔者中心积累了一些经验,本文对所在中心有限的经验做一总结,以期对机器人经腋窝手术的发展贡献绵薄之力。
1 入路的选择
笔者中心最常用的是TAA。韩国的一项统计[3]表明,超过60%的医生机器人手术首选TAA。国内王平教授团队[4]统计国内腔镜手术入路数据表明,选择TAA 的比例在国内正在快速增长,到2022 年,TAA 普及率或作为首选率均已经超过TORTVA 排在BABA 后。TAA 甲状腺手术优势主要为:⑴ 学习曲线短:无需充气,胸壁解剖相对简单、建腔过程可大部分直视操作,易于操作,对国内的甲乳外科、头颈外科医生而言,学习曲线相较其他入路更短[5];⑵ 患者接受程度高:笔者单位在评估后如胸乳入路、TAA 及经口入路均可选择情况下,均交患者选择,超过2/3 的患者首选为TAA,患者对TAA 的接受程度明显高于其他的入路方式。
2 适应证及禁忌证
CTA 及ATA 在机器人甲状腺手术的指南或共识中均建议在有条件的中心,选择合适的病例可以开展机器人手术。机器人手术的适应证包括,良性肿瘤不大于5 cm,恶性肿瘤不大于2 cm,且无腺外侵犯[6]。但术前影像评估均存在一定不足,笔者单位曾为多例术中发现侵犯喉返神经的患者行达芬奇机器人手术,由于3D 镜头的放大作用,使得细节的显露更佳,在分离肿瘤与神经黏连的过程中,使用机器人的剪刀、双极相比开放或普通腔镜手术器械对神经的功能保护做得更好,多例侵犯喉返神经患者术后神经检测显示神经信号无明显衰减。另外,笔者中心对数例I 度侵犯气管的甲状腺癌患者行达芬奇手术,在机器人辅助下,肿瘤可以得到更加精准的切除,同时也可在机器人手术下顺利完成对部分气管修补。但仍需强调,如术前评估考虑患者肿瘤外侵,则仍不适合常规开展腔镜或机器人手术。在评估患者是否符合机器人经腋窝手术适应证时需保持谨慎,特别是对于初学者而言,优先按照指南的要求选择患者。对于机器人手术的禁忌证,除了全身情况不适合手术或者病灶本身不适合手术之外,对于没有美容要求的患者一般不推荐行机器人腋窝手术。
3 腋窝拉钩的改进
笔者中心起初开始行TAA 手术时,沿用了经腋窝腔镜甲状腺手术的拉钩,即葛-郑氏拉钩,当在手术进行的过程中,笔者发现了在腔镜甲状腺手术非常好用的拉钩在机器人手术中出现了如下几个问题:⑴ 拉钩的悬吊卷帘器过于高,过高的悬吊经常容易和机械臂发生碰撞,干扰机械臂的运动,影响手术的进行(图1A);⑵ 组织拉钩的宽度较宽,在建腔的过程中不利于组织拉钩的置入;⑶ 原有手术拉钩的升降固定装置不利于术中升降拉钩。在葛-郑氏拉钩的基础上对拉钩进行了一系列的改良,使得拉钩更加适合机器人手术。其改动主要包括将悬吊卷帘器更换为小拉钩,降低拉钩的高度,明显减少了机械臂之间的干扰,加快了手术进程。拉钩高度由原来的90 mm 降为55 mm(图1B),宽度由原来的60 mm 降为20 mm(图1C),较之前明显变窄变浅,利于建腔的快速完成。床头的固定装置更换为滑轮装置(图1D)。在机器人装机成功后拉钩的高低调节在床边就可以进行,减少了对机械臂的干扰,提高了手术效率。经过对拉钩的改进,机器人手术当中机械臂同拉钩之间的干扰可以降到最低,提高了机器人的手术效率。
4 切口的选择
对于TAA 手术,切口的选择基本等同于腔镜经腋窝手术的切口选择,顺腋窝的皱褶进行切开,前面不超过腋前线,以更好地隐藏切口,在机器人手术中,有时会在同侧乳晕做一切口,放置机器臂,如图2,这样做的好处就在于机器臂3 个臂之间可以拉得更开,机械臂之间的相互干扰会减少,对于部分颈部较短、身材较矮患者更易于操作,同时缩短手术时间。

图2 切口的选择(取腋窝皱褶切口,1、2、3号机械臂均经腋窝切口入路) A:正面观;B:侧面观Figure 2 Incision selection (utilizing the axillary wrinkle incision, with the No. 1, 2, and 3 mechanical arms all entering through the axillary incision)A: Frontal view; B: Lateral view perspectives
5 建 腔
笔者在开展手术初期,出于对频繁调整机械臂和拉钩的忧虑,一般都是先使用腔镜建腔,建腔的步骤同TAA 腔镜手术,随着经验的不断累积,发现这样的建腔方式并未充分利用机器人优势。目前常用的建腔步骤为切开切口后,头灯辅助直视下建隧道直到胸锁乳突肌或直视下分离困难处,立刻装机,使用机器人来完成后续建腔过程。机器人建腔的优势主要体现在:⑴ 机器人高分辨率的镜头下,胸锁乳突肌间隙、皮神经及血管等解剖结构更加清晰,容易辨认;⑵ 机器人双极止血效果更加确切,手术后出血的概率明显减少,术后的渗出也相应减少[7-9]。
6 术中技巧
对于机器人手术其手术步骤同腔镜手术步骤大同小异,机器人手术的优势之一在于机器人器械自由度大、运动灵活精细且2 个机械臂都可以使用能量器械。机器人系统中使用的超声刀基本与传统开放使用超声刀相同,操作头与其他电能量器械比较,末端无活动结构,自由度较差,精细操作有限,并不能完全体现机器人优势。电能量器械如剪刀既可以作为单极电刀使用亦可作为剪刀使用,作为单极电刀使用时解剖层次更加清晰,但到达需要保护的部位比如甲状旁腺或者喉返神经处可将剪刀作为冷兵器使用,减少喉返神经的热损伤,保护甲状旁腺的血供;对于部分侵犯喉返神经的病灶,使用剪刀分离肿瘤,在机器人稳定放大的视野下对于神经能做到更好的保护,保护好神经的同时可以做到R0切除。双极电凝除了可以牵引甲状腺组织外,可以分离、切割凝毕同时完成,也可与剪刀配合完成凝毕—剪切工序,对于开放手术习惯使用。其他电钩等器械均有其优势及适用范围,术者可以根据具体使用场景及习惯进行选择。同时,由于双臂均可安装能量器械,如可以右手装剪刀,左手双极电凝等等,对于需要精细操作部位可在安全操作基础上大大提高手术效率。图3 显示了达芬奇甲状腺手术的术中情况,其视野高清,术中对于喉返神经和甲状旁腺的辨认更加精确(图3A-B),对于Ⅵ区淋巴结和侧颈淋巴结的清扫也更为彻底(图3C-D)。
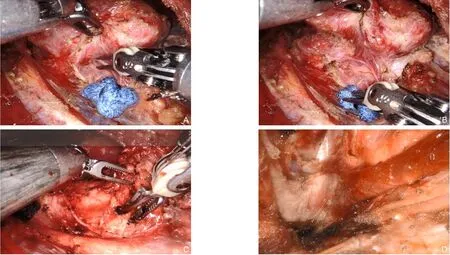
图3 达芬奇甲状腺手术术中照片 A:显露喉返神经;B:显露甲状旁腺;C:清扫Ⅵ区淋巴结;D:侧颈淋巴结清扫术后Figure 3 Intraoperative photos of Da Vinci thyroid surgery A: Exposure of the recurrent laryngeal nerve; B: Exposure of the parathyroid gland; C: Dissection of lymph nodes in the region Ⅵ; D: Ⅴiew after lateral neck lymph node dissection
7 并发症
机器人甲状腺手术的并发症基本等同于腔镜甲状腺手术的并发症,其处理方式也大同小异,并发症包括了术后出血、神经损伤、气管壁损伤,甲状旁腺损伤及术后的积液。机器人手术系统由于具备超高清视野、机械臂有7 个活动维度,震颤滤过系统可以过滤手部颤抖,灵活的镜头使视野更加开阔几乎没有视角盲区等优点,大多数文献[6,10-13]报道其并发症的发生率基本等同于开放手术而优于腔镜手术。机器人甲状腺手术独有的缺点在于没有触觉反馈系统,依靠的是视觉反馈系统,因此对于初学者来讲对于力度的控制往往不能很好掌握。但随着手术经验的积累,可通过操纵杆的操作顺畅程度结合视觉观察,作为触觉反馈的补偿。机器人手术另外一个并发症为机械臂对锁骨、胸锁乳突肌、带状肌的摩擦,部分患者由于锁骨较高、颈部较短,机械臂可能对锁骨近胸骨端、临近肌肉部分反复摩擦,造成术后患者术区疼痛、肌肉损伤等。对于此类并发症,笔者在术中解决此类问题的经验包括,对于锁骨较高的患者,可以在乳晕处另开切口置入Trocar,或者将腋窝辅助孔越过腋前线,同时在手术中可以在锁骨处放置腔镜纱布或者在所使用器械前端套一个橡胶保护套,以减少该区域的损伤,减少术后不适。
8 当前存在问题及未来发展
机器人经腋窝免充气手术经过十几年的发展,其安全性,肿瘤根治的彻底性不断得到验证,同时又有着非常好的美容性,受到广大患者的推崇[14-19]。机器人手术系统发展的逻辑是以机械和人工智能替代人手和人脑[19]。但当前的手术系统智能化还较低,触觉反馈存在缺陷,尚无可能完全取代人手。此外制约机器人甲状腺手术最大障碍在于机器人手术耗材昂贵,但是相信随着国产机器人的上市,机器人经腋窝甲状腺手术将会造福越来越多的患者。在临床实践中除了要掌握机器人的手术技巧,同时要对机器人手术中可能出现的并发症加以关注,在保证患者安全的前提下完成肿瘤根治,同时最大程度做好功能保护。开展机器人手术系统的规范化培训,多中心之间的交流,开展大规模长期随访的随机对照临床研究以评估其安全性和有效性,不断制定和更新机器人手术操作的专家指南和规范化操作是当前及未来临床上亟待开展的工作。
利益冲突:所有作者均声明不存在利益冲突。
作者贡献声明:王宇和史荣亮对研究设计和框架把控作出贡献;史荣亮、倪兆娴、孙国华、渠宁、刘婉琳、马奔、王玉龙、魏文俊、向俊和嵇庆海进行了材料准备和分析;史荣亮撰写初稿,王宇修订;所有作者阅读并确认了最终的手稿。
