基于偏差耦合平衡控制的矿井带式输送机超长距离运输技术研究与应用
2023-12-20王坤
王 坤
(山西焦煤西山煤电杜儿坪矿,太原 030000)
原煤运输作为矿井生产主要部分,其工作方式及效率直接关系到矿井正常生产。随着矿井开采技术的发展,开采深度不断加深,原煤运输距离逐渐增加,运输压力显现。目前,工作面、盘区原煤运输主要以带式输送机为主,大巷采用电机车牵引矿车方式,该方式存在原煤运输速度小、效率低等问题,无疑增加了大巷运输压力,影响工作面生产效率。
带式输送机作为矿井原煤运输主要方式,随着采掘技术的发展,带式输送机在运输量、距离以及功率等方面均有了更高要求,传统小型单机驱动方式不足以满足实际需求,因此,研发长距离带式输送机迫在眉睫。
关于带式输送机运输技术研究和应用较多,但矿井带式输送机长距离运输技术研究甚少,主要以理论建模分析为主[1],实际运用更为缺乏。长距离带式输送机通过传统单机驱动必将产生一些列问题,如应力集中、跑偏以及断带等。因此,长距离带式输送机的运用,首要解决驱动问题,通过多电机驱动成为必然,电机数目的增加势必使控制系统更加复杂,带来各电机功率分配不平衡等问题,给带式输送机正常运转产生不利影响[2-4]。
综上所述,长距离运输必须要解决驱动功率、功率平衡以及驱动点的布置等问题[5-6]。因此,建立和优化带式输送机运输系统对矿井原煤高效运输至关重要。同时,解决带式输送机长距离平稳运行对矿井带式输送机长距离运输技术发展起到积极影响。
1 带式输送机动态特性分析
杜儿坪矿现开采盘区有南九、北三、北五、北七盘区,主要开采2#、3#、6#、8#煤层。目前,北三、北五、北七盘区原煤运输主要以电机车牵引矿车方式,存在运输效率低、运输压力大等问题,严重影响正常生产。为此,对北一胶带机大巷带式输送机进行延伸,延伸长度1 826 m,延伸后总长5 620 m,运输能力1 500 t/h。原煤通过北一胶带机大巷带式输送机连续化运输至井底动仓、焦仓、掘仓,分煤种进行卸载,经主斜井带式输送机提升至地面选矸车间,分煤种选矸后进入地面3个筒仓。
带式输送机由钢丝绳芯、橡胶构成,其黏弹性决定了其具有五大特性:滞后性、频率性、非线性、蠕变性以及松弛型。带式输送机在启动、运转过程中,受到静力、张力作用,直接影响带式输送机运转。因此,对带式输送机进行动态特性分析很有必要。目前,学者在分析带式输送机动态特性时,主要运用Kelvin-Voigt模型,具体见图1所示。
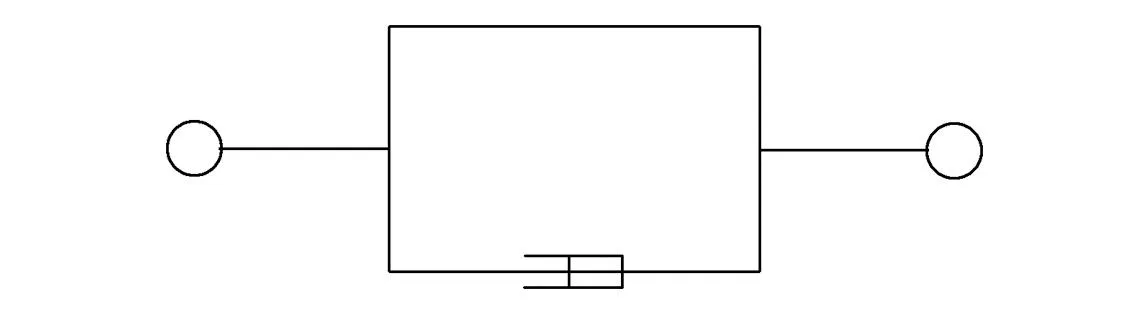
图1 Kelvin-Voigt模型Fig.1 Kelvin-Voigt model
将带式输送机驱动系统为连续模型,得到皮带微元受力模型,如图2所示。

图2 皮带微元受力示意图Fig.2 Force diagram of belt microelement
2 带式输送机多点驱动
2.1 驱动方式
北一胶带机大巷带式输送机延伸后总长度5 620 m,在解决原煤运输的同时,增加了输送机运输距离,面临运输距离长、运输负荷大等问题。同时,输送带张力明显增加,对输送带平稳运转提出考验。为减小长距离带式输送产生的张力,通过对带式输送机运行过程动力学性能分析,提出多点驱动方式,尽可能避免输送带出现撕裂。目前,多点驱动方式主要分为直线摩擦式多点驱动、转载式多点驱动。直线摩擦式多点驱动是通过在输送带中间布置驱动点,从而提高输送带摩擦力,以达到减小输送带张力的目的。转载式多点驱动主要在输送带中间布置转载滚筒、驱动电机,通过转载驱动电机增加驱动力,最终实现对输送带张力的减小,转载式多点驱动方式最为常见。
2.2 中部驱动位置
目前,确定输送机中间驱动位置的方法有两种:等圆周力法及等围包角法。等圆周力法根据驱动功率,结合输送带实际情况,确定驱动点数量;等围包角法主要针对输送带局部,二者可分为等距离布置法和等张力布置法。等距离布置法是在输送带相同长度位置增加驱动点,等张力布置法保证输送带各点张力相同。基于对输送带运行过程的力学分析,经过多方论证,确定中部驱动位置,如图3所示。

图3 中间驱动位置示意图Fig.3 Intermediate drive position
2.3 中部驱动设计
杜儿坪矿北一胶带机大巷带式输送机原长度3 794 m,驱动功率3×500 kW。延伸长度1 826 m,机尾延伸至北石沟,延伸后北一胶带机大巷带式输送机总长5 620 m。考虑到延长后运输距离过长,电机负载明显增大,皮带张力增加,易出现撕裂。为确保5 620 m皮带平稳运转,采用多点驱动的方式,增加中部驱动装置(装置明细见表1所示)如图4所示。同时,对带式输送机运输能力、带宽进行校核,确定驱动功率。
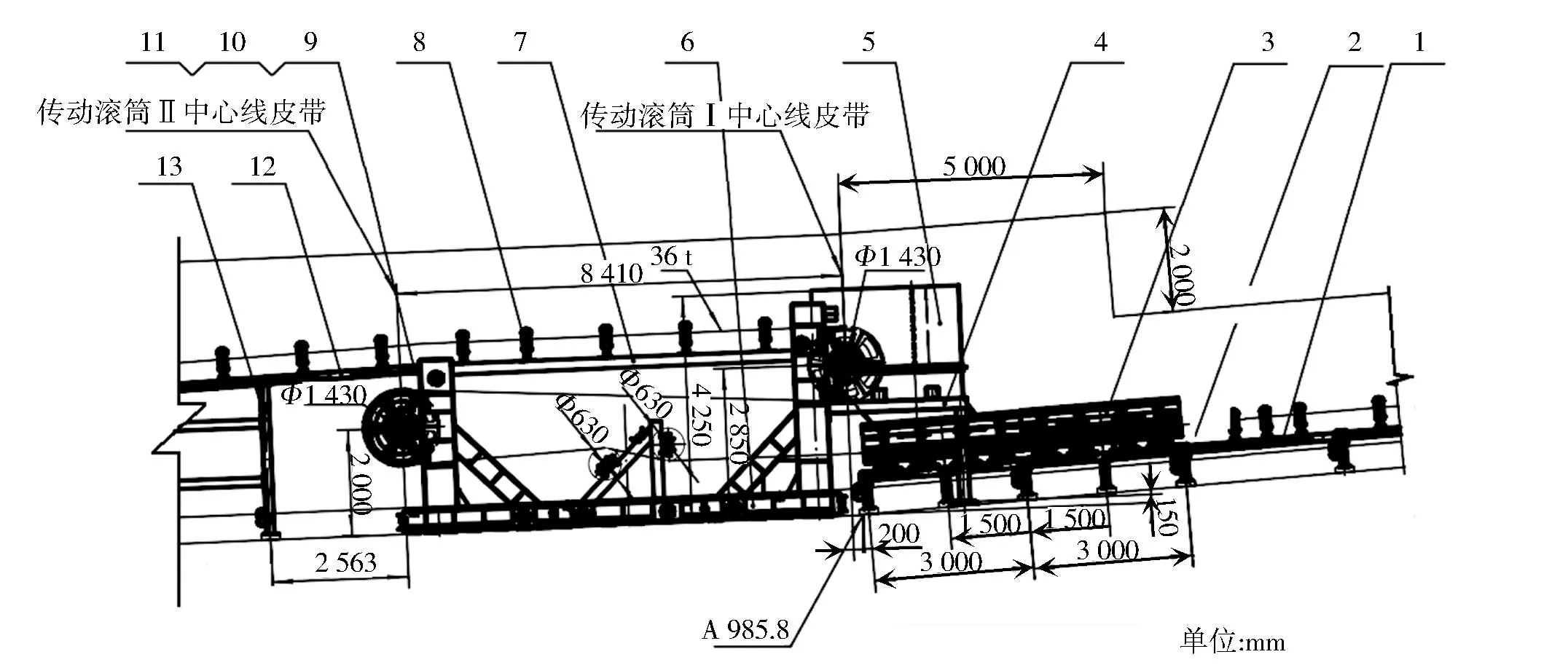
图4 中部驱动装置图Fig.4 Middle drive device

表1 中部驱动装置明细Table 1 Detail list of middle drive device
煤运输能力计算如公式(1)所示:
(1)
式中:Q为运输高峰煤量,t/h;∑Qi为生产能力总和,t/h;K1为设备利用系数;K2为同时生产系数;K3为掘进煤量系数。代入数据得:Q=992 t/h。
胶带宽度计算如公式(2)所示:
(2)
式中:b为胶带宽度,m;K为断面系数,取315;ρ为物料散密度,t/m3;v为带速,m/s;C为倾角系数,取1;ξ为速度系数,取0.82。代入数据得:b=1.23 m
驱动功率计算如公式(2)所示:
(3)
式中:P为电机功率,kW;mb为胶带单位长度重量,kg/m;mR为托辊转动部分重量,kg/m;v为带速,m/s;Q为运输能力,t/h;h为提升运输垂直高度,m;f为托辊摩擦系数;l为输送机水平距离,m;C为计算系数;Pcd为清扫器附加功率,kW。代入数据得:P=2 278 kW
综上所述,北一胶带机大巷带式输送机延伸后,选用输送带型号为ST/S3150-1400,中部驱动功率选用2台功率为500 kW的永磁电机,设备参数详见表2。

表2 技术特征表Table 2 Technical characteristics
3 基于偏差耦合多机平衡控制
3.1 多电机驱动功率平衡方法
带式输送机运输距离过长,不仅增加输送带张力,且易导致皮带撕裂事故发生。本文采用转载式多点驱动方式,通过5台功率为500 kW的永磁电机联合驱动5 620 m带式输送机,电机功率平衡直接关系到输送机的运行状况。从现场调研来看,矿井带式输送机在运转过程中易受到负载扰动、现场环境等因素的影响,造成各部电机之间功率不平衡,对电机、托辊等零部件产生损伤,影响输送机正常运转。
本文采用5台功率、参数相同的永磁电机联合驱动5 620 m带式输送机。其中,永磁电机1、2分别驱动机头滚筒1、2,机头滚筒1、2通过皮带柔性连接,共同作为机头控制部分;永磁电机3、4分别驱动中驱滚筒1、2,中驱滚筒1、2通过皮带柔性连接,构成中驱控制器;机尾通过永磁电机5驱动机尾滚筒1,为机尾提供动力。具体见图5所示。

图5 多电机驱动结构示意图Fig.5 Multi-motor drive structure
由图5可知,5台TBVF-500/80YC永磁电机均通过输送带柔性连接,当运输距离较长时,不利于电机间的耦合,造成电机速度不一致。然而, 多电机功率平衡的重要前提为各电机转速、输出转矩相同,常规手段很难达到转速一致目的。因此,本文对各电机转速进行闭环控制,并保证输出转矩相同,即在永磁电机2、3、4、5速度控制器前增加一个补偿器,如6所示,各电机补偿器结构类似。
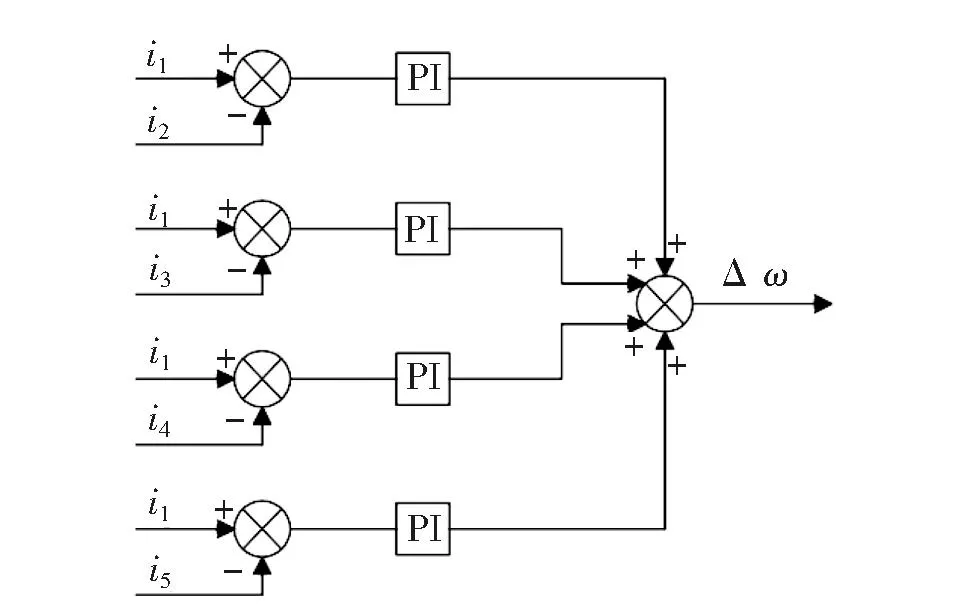
图6 电机补偿器结构图Fig.6 Motor compensator structure
3.2 多电机驱动功率平衡控制
目前,随着带式输送机运输距离的增加,多电机联合驱动成为趋势,本文采用5台永磁电机联合驱动,为实现功率平衡,首先通过收集各电机电流、转速值,其次采用坐标转换的方式,得到对应转矩电流值,即反映各电机功率值,因此,通过控制转矩电流值可达到功率控制的目的。根据电机运行特性,转速及转矩电流是影响电机功率平衡的两大因素。为此,通过观察5台永磁电机转矩电流值,若电流值较大,表示转矩较大,则相应的降低其频率,反之,当电流值较小,表示转矩小,则相应的增加其频率。但在改变电机频率的同时,转速亦发生变化,造成功率不平衡。所以,必须确保频率调节后转速不发生变化。本文在多电机驱动系统中增加偏差耦合控制手段,具体见图7所示。

图7 偏差耦合控制结构图Fig.7 Deviation coupling control structure
由上述偏差耦合控制方法可以看出,电机在负载作用下,各电机产生相应的转矩电流值,偏差耦合结构会对各电流值进行分析,当部分电机转矩电流值出现不一致,偏差耦合结构通过补偿器,给电机一个补偿转速,并在5台电机中形成耦合闭环,从而使得5台电机转速相同,保证5台电机功率平衡。同时,为解决PI控制器超调,提高系统可靠性,在控制器结构中增加了输出限幅和积分限幅,具体见图8所示。

图8 控制器结构示意图Fig.8 Controller structure
3.3 系统仿真
为验证偏差耦合控制方法可靠性,利用Matlab软件,搭建结构模型,对电机负载启动、空载启动至负载两个过程转矩、电流进行仿真:
3.3.1负载启动
电机负载启动时,扭矩为100 N·m,电机运行至0.6 s时,加载到200 N·m,此时各电机转矩、电流及转速如图9所示。
由图9可知,各电机转矩、电流及转速基本保持一致。其中,电机负载启动时,电机转矩、电流及转速从0瞬间增加至一定值,随后保持平稳;0.6 s加载,转矩、电流瞬间增加,后保持稳定,转速不变。因此,电机负载启动及加载过程中,5台电机能够在极短时间实现转矩、电流、转速的稳定,达到多电机功率平衡。

(a) 电机转矩图
(b) 电机电流图
(c) 电机转速图图9 负载启动电机特性曲线Fig.9 Motor characteristic curves
3.3.2空载启动至负载
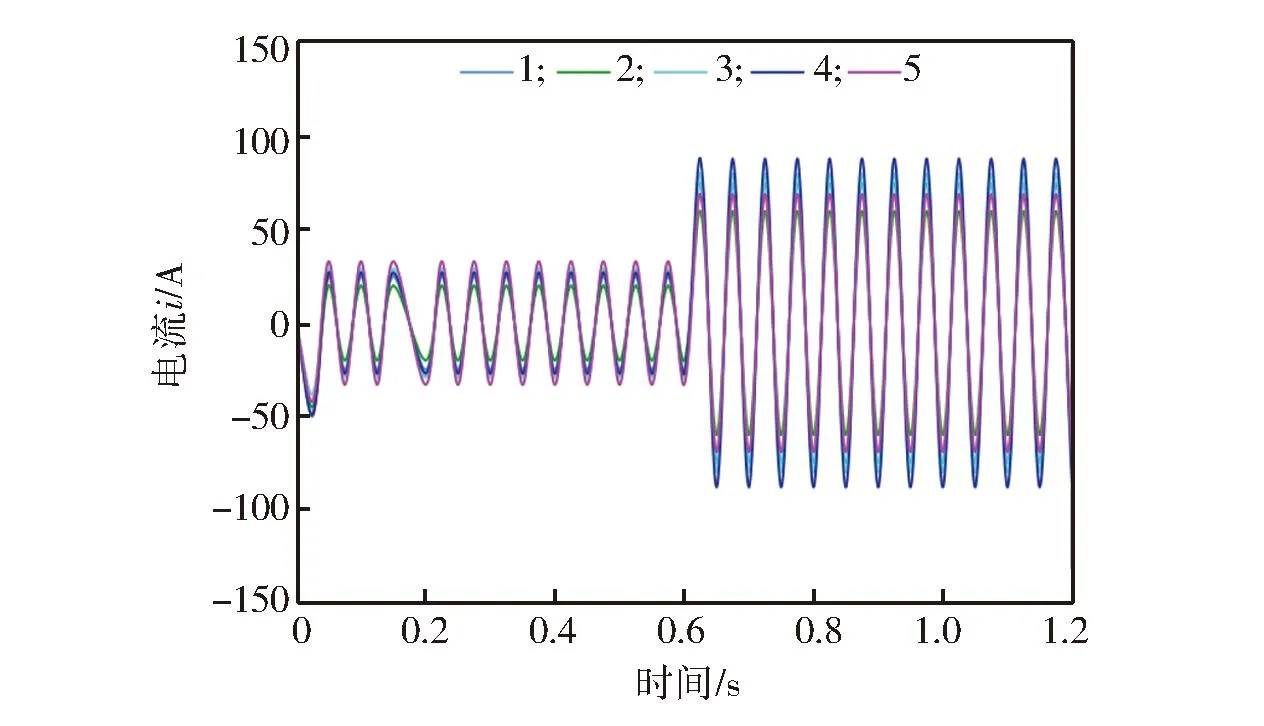
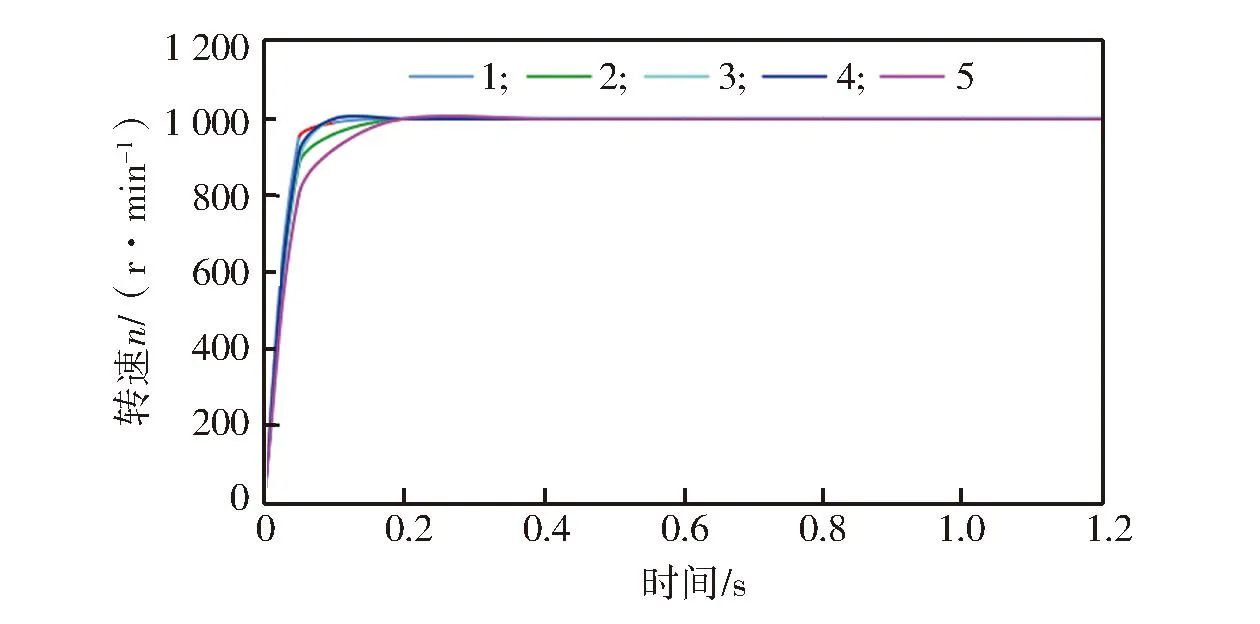
电机空载启动时,电机运行至0.4 s时,加载至300 N·m;电机运转平稳后,在0.8 s继续加载80 N·m,此时各电机转矩、电流见图10所示。

(a) 电机转矩图

(b) 电机电流图

(c) 电机转速图图10 空载启动电机特性曲线Fig.10 Motor characteristic curves
由图10可知,各电机转矩、电流、转速基本保持一致,其中,电机空载启动瞬间,电机转矩、电流为0,转速1 000 r/min;在0.4 s、0.8 s加载,转矩、电流瞬间增加,随后保持平稳,转速先降低,0.05 s后瞬间增加至1 000 r/min,后保持平衡。因此,5台电机能够在极短时间实现转矩、电流、转速的稳定,达到多电机功率平衡。
综上所述,在5 620 m超长距离带式输送机运输系统中,运用偏差耦合方法可实现5台电机功率平衡,对带式输送机平稳运转起到重要作用。
3.4 现场测试
为验证偏差耦合控制方法可靠性,对5 620 m带式输送机进行运行调试,分别做了负载启动、空载启动。当皮带上有原煤时,带式输送机缓慢启动,速度逐渐增加,随后保持3 m/s速度匀速。皮带上无原煤时,带式输送机启动后带速瞬间增加至限速速度3 m/s;当增加原煤时,带速降至2.9 m/s,0.1 s后迅速增加至3.0 m/s,并保持匀速运转。如图11所示。

图11 现场实物图Fig.11 On site physical objects
4 结论
本文采用偏差耦合控制作为解决超长距离皮带运输多点驱动功率平衡方法,通过仿真和现场运用得到以下结果:
1)通过增加中部驱动装置,采用5台电机多点驱动方式联合驱动5 620 m带式输送机。
2)运用偏差耦合控制方法解决了5台电机多点驱动功率平衡问题,实现了5 620 m带式输送机平稳运转,原煤运输能力提高到400 t/h,运输效率提高5倍,工作面生产效率提高10%。
