基于自主移动消毒机器人的控制方法研究
2023-12-19贾睿
贾睿
睿驰(深圳)智能有限公司 广州 深圳 518000
引言
自主移动消毒机器人可以缓解劳动力的压力,降低疫情传播风险,自主移动消毒机器人种类非常多,有手持式、无人机式、机器人自动喷洒消毒机器人等。这些机器人可以根据不同的需求进行定制,满足不同场景的消毒需求[1]。在这种背景下,自主消毒机器人的定位需要明确,确保机器人的工作范围是在规定范围内,然后根据实际情况进行设计。这其中包括消毒效果、安全性、操作简便性等。同时,还要考虑机器人的稳定性、可靠性、成本等因素,再根据需要进行消毒机器人控制系统的大致设计工作。
1 智能机器人控制系统方案设计
智能移动机器人控制系统采用顶层与底层控制相结合的方式来实现地图构建与自主导航。顶层控制系统使用树莓派4B作为上位机,装载Ubuntu 1854以及ROS Melodic操作系统,通过USB接口连接激光雷达,接收外界环境信息给树莓派进行处理,在移动过程中通过连接深度相机实时上传拍摄信息[2]。底层控制系统以STM32控制器为核心,接收来自顶层控制的速度命令,输出PWM信号给电机驱动控制带编码器的电机转动,并根据电机的速度反馈回STM32控制器来实现闭环控制。机器人设计框图如图1所示。
树莓派接收传感器的反馈信号,通过Wi-Fi发送给手机等手持移动设备,操作者通过手机Wi-Fi连接树莓派,经由树莓派将指令发送给各功能模块,使机器人完成相应作业任务。本次设计中机器人的系统结构框图如图2所示。
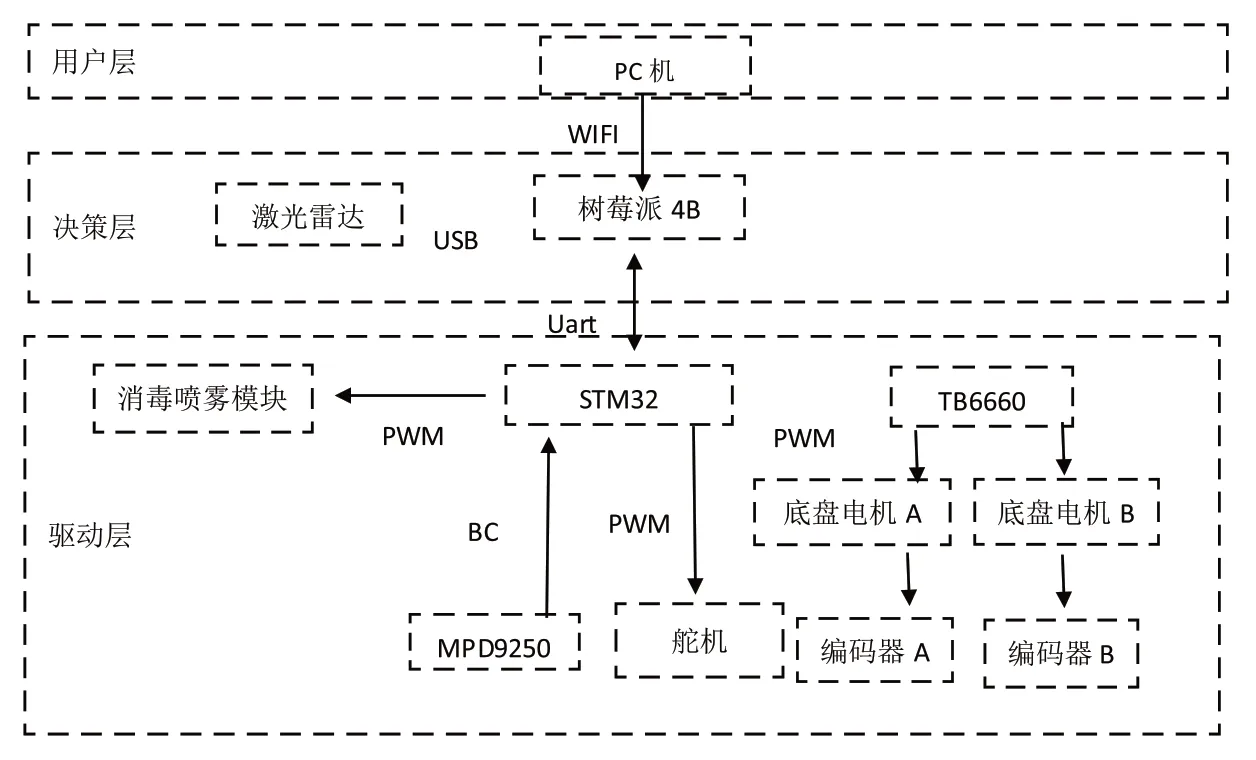
图3 硬件系统框架
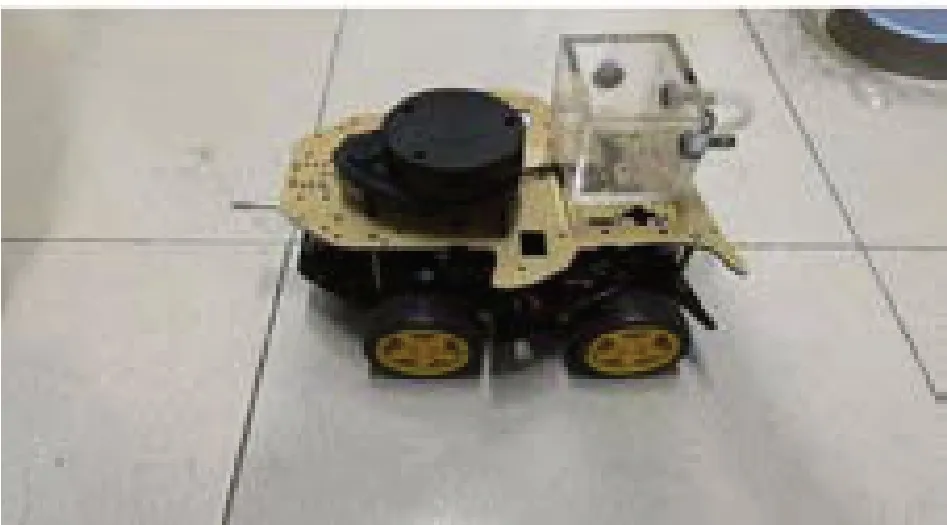
图4 自主移动消毒机器人平台实物图
2 消毒机器人硬件平台设计
自主移动消毒机器人的功能需求以及适用的场景分析,每层选用的控制器都采用了不同的arm架构,以满足自主移动消毒机器人的各种功能需求,用户群体就是PC电脑端,通过Wi-Fi与领导层控制器通讯,实现远程操控[3-4]。同时,机器人还具备语音交互功能,可以与用户进行语音交互,提供多种服务[5]。决策层的核心操控者,是树莓派4B,这样的设计可以保证用户不需要额外的硬件支持,就可以轻松实现桌面操作系统的开发。同时,树莓派4B还具有强大的扩展能力,可以为用户提供丰富的应用程序,满足日常办公需求。携带Ubuntu技术与noetic更新的ROS系统中,再与激光雷达进行连接,主要根据红外雷达采集的信息来做决策规划,并且发出控制指令传达给驱动层,控制层采用STM32F407VET6电子作为主服务器,实现对激光雷达的自动跟踪、定位、识别、测速、导航等功能。操作机器人的智能与消毒喷雾模块构建消毒液的喷散。
2.1 避障模块设计
该模块主要是结合了红外线和超声波传感器相结合的方式,从而确保避障功能的实现。
2.1.1 红外线传感器:主要是通过一定角度的红外光束,当光触碰到物体之后就会进行反射方向回去,传感器接收到了反射光之后就可以进行电路处理,最终输出一个低电平的信号。CCD的传感器在检测到了红外反射光之后能得到一个偏移值L,结合三角测量原理的基本数据之后,就可以根据此几何关系算出传感器和物体之间的间距D。
2.1.2 超声波传感器:利用I/O口发射出2个超声波信号至2个发生电路中,通过2个信号接收电路对接收到的信号进行放大。这些信号经过数据处理之后,结合发射接收的时间差,就可以计算出传感器和障碍物之间的间距D,这样的话就可以对自主机器人的运动安全性进行判断评估,针对存在的不足可以及时的进行调整。
2.2 防碰撞模块
该模块主要是光电传感器与接触式传感器相结合确保防撞功能实现。
2.2.1 光电开关的传感器:该传感器主要是依据射式光电开关的原理,安装在自主移动消毒机器人前端位置左右两边都安装光电的开关传感器,在机器人在运动的时候,如果受到碰撞,碰撞板就会遮挡住之前设置的小孔避免红外线的接收,并会向控制系统反馈出碰撞信息做出动作处理。
2.2.2 接触式传感器:该传感器可以将测量到的物理量转化成为电量,可以对物体的高度、空间的大小进行丈量。此次自主移动消毒机器人正是结合接触式传感器的原理来对障碍物的高度进行测量,在设计中还会将滚动触头安装在传感器上,这样的话可以有效减少机器人的磨损。
2.3 防跌落模块
防跌落模块主要是通过红外台的检测传感器对机器人和地面之间的距离进行分析,会跟系统预先设置好的数值进行对等,当自主移动机器人移动到台阶等危险位置的时候会向后台系统发送信号,系统就可以对自主移动消毒机器人的行动方向进行改变。
3 消毒机器人控制系统综合实验
3.1 ROS设计框架
自主移动消毒机器人的整体布局与平台设计中的三维结构图一致,具有良好的稳定性和灵活性。该机器人采用高精度传感器,可实现自主移动消毒,并具有多种功能模块,包括消毒液喷洒、喷雾、雾化、雾化器、雾化装置、雾化器驱动等。机器人的工作原理是通过电机带动液体喷射器,将液体喷射到物体表面,利用液体的流动特性,使物体表面形成雾状,达到雾化目的。
自主移动消毒机器人若能够在真实环境下工作,需要由PC机通过ROS平台中的一个接口连接到真实世界的电脑上,这样就可以实现远程操作。ROS平台的另一个功能是可以通过网络连接到其他机器人[6]。ROS平台还可以通过一个网络连接到一个虚拟的计算机,这个计算机可以是任何类型的计算机,包括服务器、笔记本电脑、手机等等。ROS平台的一个重要特点是它可以在不同的地方运行,并且可以通过网络连接到不同的设备。ROS中也提供了URDF升级而成的Xacro优化方案,它通过对变量完成封装以及添加数学定理运算等性能,来实现自主移动消毒机器人ros的自主定位和自主导航。这样一来,机器人就可以根据不同的场景来选择合适的路径,从而避免人工干预的情况发生。同时,ROS还具备一定的智能感知能力,可以通过摄像头来观察周围环境,并且可以自主调整行走方向,以适应复杂的环境。
3.2 实验
为了对自主移动式消毒机器人的避障能力及建图功能进行检测,在消毒机器人制作完成后,我们开展了多项的功能测试。
3.2.1 建图测试。给自主移动式消毒机器人通电之后,机器人可以连接上Wi-Fi信号装置,利用SSH命令就可以登录进入自主移动式消毒机器人的树莓派系统中,输入用户名及密码之后,进行启动,开始建图测试。我们还可以在电脑终端对机器人发出Riz命令实现状态检测,整个建图中机器人的运动可以通过蓝牙进行控制。
3.2.2 避障导航测试。建图完成之后对地图进行保存,将机器人置于起始点位置,将其作为原点,建立坐标系(横轴为X轴、纵轴为Y轴),机器人的车头方向与y轴重合,执行行动命令后,开启机器人自主移动相关节点。终端后台利用Rif命令,使用0D Nov Govt功能设定目标位置。通过测试发现,在机器人行动过程中,地图会出现多条路径,机器人选择其中的路径可以选择前进倒退,还能识别出周边的障碍物,可以做到有效避障。
3.2.3 控制精度测试。为了测试机器人的精度,在进行路径导航测试的时候,随机设置好两个目标点,结合达到目标位置的数据,得到导航精度,最后测试结果显示自主移动消毒机器人的平均导航位置精度为4.9cm,平均角度精度为2°基本满足设计要求。
4 结束语
总的来说,自主移动消毒机器人的控制方式是基于物联网技术,通过无线传感器网络实现远程操控,可以对空气进行消毒杀菌,对于软件和硬件都有一定的要求,在平面设计上需要考虑机器人的安全性、稳定性以及操作便捷性,同时还要考虑使用场景的特殊性。不过,随着技术的发展,相信自主移动消毒机器人会越来越好。
