基于膝关节外骨骼张弛穿戴系统的动力学性能优化*
2023-12-18齐文耀杨玉维王宇宁谢思训
查 理,齐文耀,杨玉维,彭 举,王宇宁,谢思训
(1.天津理工大学天津市先进机电系统设计与智能控制重点实验室,天津 300384;2.机电工程国家级实验教学示范中心(天津理工大学),天津 300384)
1 文献综述
随着我国老龄化社会的到来,膝关节骨关节炎(Knee Osteoarthritis,KOA) 患者日益增多,且目前仍无可根治KOA[1]。相较药物治疗的不足,使用外骨骼辅助以削弱膝关节软组织轴向冲击荷载是预防与辅助康复治疗KOA 的关键。因此,大量学者进行了机器人辅助膝关节康复治疗的相关研究[2]。但现有外骨骼机器人的相关研究更加注重机器人本身的“结构设计”[3],如文献[4]研制了一种下肢仿生外骨骼,对髋关节采用液压与电机混合的驱动方法,而且在结构设计上考虑了承载的有效性,可自动调节维持身体平衡,但其在绑缚结构设计中仍使用绑带卡扣的固定式结构。文献[5]使用电机加线驱动模仿气动人工肌肉的收缩方式为脑卒中患者进行步行中的踝关节助力,可自适应平地行进、上下楼等运动方式。文献[6]在外骨骼结构设计方面对外骨骼康复机器人进行设计,并使用刚柔耦合动力学分析的方法对其性能进行评估。文献[7]设计了一种兼具绳/并联机构优点的外骨骼辅助装置,用以提升外骨骼的助力性能。文献[8]、 [9] 则使用动、静力学分析与虚拟样机结合算法寻优的方法对外骨骼机器人进行设计及优化。
虽然上述外骨骼在步态周期中可一定程度缓解下肢所承受的运动载荷冲击[10],但由于固定绑缚式的穿戴方式易导致人体局部软组织的进一步损害[11]。因此,KOA 患者无法持久穿戴此外骨骼。考虑到下肢步态周期内所具备的运动生物力学特征,在“支撑相[12]”时,该系统应具有较高的穿戴接触压力,以实现对运动荷载的有效支撑;而在“摆动相[13]”时,系统应具有较低的穿戴接触压力,以实现运动的灵活性与穿戴的舒适性。
基于上述研究成果的不足,为了提升下肢外骨骼人-机并联系统的穿戴舒适性与运动的灵巧性,本文在自有发明专利[14]的基础上,设计了一个基于新型超越离合器驱动的外骨骼张弛穿戴系统,并结合下肢运动周期对其进行运动机理的解析与虚拟样机仿真优化。考虑到文献[15]中对外骨骼穿戴舒适性及运动灵巧性的相关阐述,在ANSYS Design-Xplorer(DX) 优化模块中选取对优化目标最为敏感的自变量因素进行参数化,最终得出了一组优化后的超越离合器设计参数。上述研究对于外骨骼人-机并联系统的设计与优化具有一定的参考意义。
2 研究原型及其仿生工作机理
在摆动相中,外骨骼张弛系统在助力过程中应注重整个人-机并联张弛穿戴系统的灵活性;在支撑相中,由于此过程人体重心会转移,增大了具有平行能力缺陷的人群的行走难度,而在此过程中增大人-机接触压力有利于助力效果的提升,因此人-机并联张弛穿戴装置在完成此过程时应更加注重装置相对人体的承载接触压力系统动态特性的研究。因此,基于人体步行过程中下肢运动相关生物力学原理,提出与人体运动动态特性要求相匹配的具有变刚度张弛自锁功能的研究原型——人-机并联张弛穿戴系统,见图1。
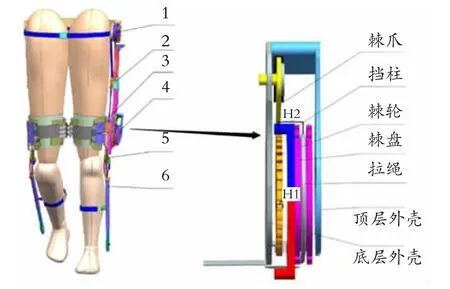
图1 人-机并联张弛穿戴系统
本文主要研究4 超越离合器驱动单元在运动中对自身及3 膝关节人-机并联系统的动态影响。其中,4 超越离合器驱动单元的工作机理如下。
1) 支撑相初始阶段,步进电机启动,棘轮顺时针转动,此时棘爪上端未与永磁铁吸附,但由于棘轮棘爪机构具有正转可行的特性,转动不会被阻止,在转动过程中线性弹簧伸长并储能。
2) 支撑相持续阶段,步进电机转动,牵动弹簧及阻尼进行收拢,进而拉动左侧铠甲层,将拉力传递至右侧铠甲层,步进电机转动额定角度后停止,此时棘轮棘爪机构自锁,整个离合器无法逆时针反转,线性弹簧仍然处于伸长状态。此阶段,步进电机转动增加人-机并联张弛穿戴系统对人体的法向载荷,通过提高人-机接触压力来增加助力有效性。
3) 支撑相结束阶段,此阶段步进电机二度顺时针正转一个小角度后停止,使得蓝色挡柱翘起棘爪前端并吸附在永磁体上,达到解除离合器自锁的效果。
4) 摆动相开始阶段,前一阶段自锁解除,弹簧立即回缩,使棘轮逆时针反转,弹簧及阻尼整体快速向右回缩,棘爪仍与永磁体保持吸附。
5) 摆动相持续及结束阶段,由于棘轮与步进电机连接处外设扭簧,使得棘轮反转回复角度足够大,复位挡柱转到棘爪左上位置并将棘爪剥离永磁铁,使其卡住棘轮,离合器只能顺时针正转。至此,离合器工作的一个周期结束,等待下一个支撑相的开始。
3 动力学性能仿真
本优化综合建立在虚拟样机有限元仿真数据和ANSYS DesignXplorer 的基础上,旨在针对给定弹簧节点的最大加速度数值,弹簧节点的最大速度数值,棘轮棘爪接触处的最大应力3 个状态变量工况,并借助Design Xplorer 平台获取设计变量超越离合器棘轮厚度,棘轮质心平面与轮盘质心平面间距离的最优数值解,优化重建外骨骼张弛系统超越离合器驱动单元模型并进行虚拟样机仿真验证。优化流程的具体步骤见图2。

图2 优化流程
3.1 提取超越离合器驱动单元模型
由于外骨骼张弛穿戴系统模型的接触关系复杂,且外形不规则的腿部肌群组织具有超弹性特性,因而无法使用一般科学试验获得下肢运动时外骨骼张弛穿戴系统整体对肌肉组织的动态影响数据。
图3 为人-机并联张弛穿戴系统简图。等效替代是可行且高效的方法,因此可利用功能等效原理先将图3 中超越离合器驱动单元从运动状态中剥离出来,进行详细虚拟样机有限元分析,将分析得出的速度/加速度数据按照图3 中俯视图的实际情况进行分解,并转换为非线性接触刚度模型(图3 中虚线部分) 法向所受载荷,从而实现整个人-机并联张弛穿戴系统等效转换。
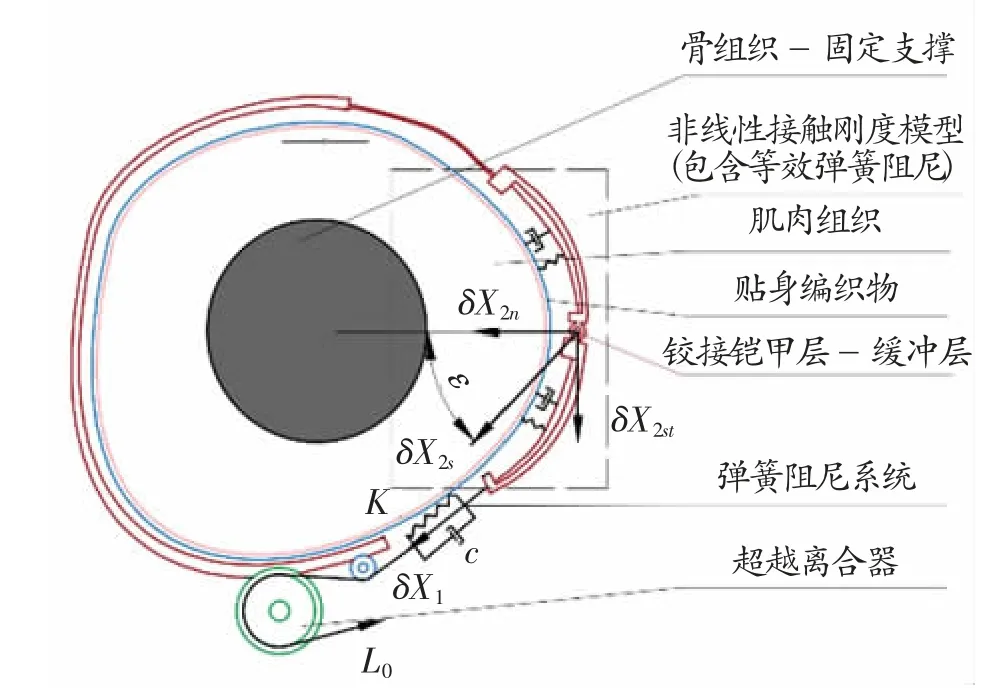
图3 人-机并联张弛穿戴系统简图
在步态周期的支撑相中,由于离合器单元周向方向的张紧作用,弹簧阻尼系统因电机的张紧作用而产生大腿周向方向拉伸量δX1,由于限位轮保持弹簧与外骨骼铠甲层连接副中心轴法向方向成角ε=42°,从而导致非线性接触压力模型在大腿周向的变形为δX2s。在总拉伸量L0的影响下,肌肉组织所受径向分变形为X2n,且此值不应超过人体表面对径向变形耐受的临界值[16]。由几何关系得到表达式为
非线性接触压力模型法向变形大小的表达式为
同理,可将限位后的周向方向加速度as分解为法向加速度an与切向加速度ast。而该系统在摆动相下由于弹簧回复,从而极快地进入松弛状态。因此,在该过程中,外骨骼接触压力的瞬间降低使其向人体传递的载荷波动可忽略不计。
3.2 有限元仿真
在步行周期的支撑相开始及持续阶段,本文参照步态周期中支撑相的运动原理对铠甲层施加从0 s 到0.72 s 逐渐增大,且最大值为28 mm 的线性位移载荷[17],见图4。
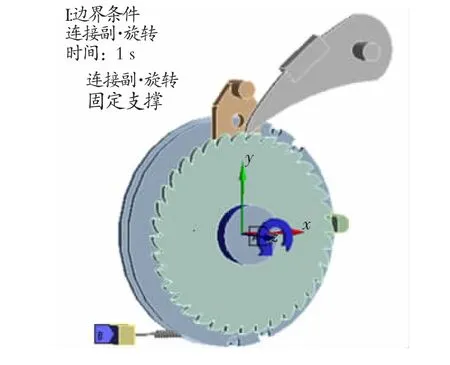
图4 有限元模型边界条件
设定模型中使用的单元类型为solid187 单元,借鉴文献[18]的建模方法,设置有限元模型中各个部分的材料力学参数。由此,可最大限度模拟出工作条件下膝关节外骨骼张弛穿戴系统中超越离合器驱动单元的动态特性。
3.3 弹簧阻尼系统振动参数的优选
加速度在频域下的变化见图5。对图5 中各个阻尼参数下的加速度输出结果进行频谱分析及优化筛选,结合文献[15]中对膝关节外骨骼穿戴舒适性及运动灵巧性的论述,可筛选出最契合人体步态周期下运动灵巧性及穿戴舒适性的超越离合器弹簧阻尼系统的阻尼参数,如图5 所示,最终优选超越离合器驱动单元的弹簧阻尼系数为0.3 Ns/mm,之后进行动力学仿真。
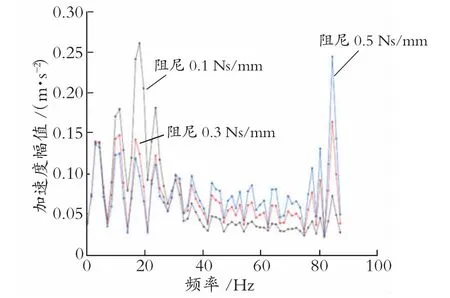
图5 加速度在频域下的变化
4 结构优化
DesignXplorer 是Ansys 平台下集成的一个可对产品中主要的参数进行优化的工具,在DX 界面下设置优化参数以及优化目标,即可对设定的变量进行逐一优化。
根据上述膝关节外骨骼张弛穿戴系统的动力学分析,系统弹簧节点的最大加速度为5.17 mm/s2,弹簧节点的最大速度为0.45 mm/s,棘轮棘爪接触处的最大应力为46.58 MPa,此组目标变量过大会影响超越离合器工作的寿命与精度以及外骨骼穿戴系统的舒适性与运动的灵巧性,故需对该组变量进行机构优化。
在结构设计软件Soildworks 中对超越离合器驱动单元的多个结构参数进行参数化,导入Ansys 软件中,针对上述3 个目标参数进行优化设计。设计优化参数上下限范围,并计算对应的优化目标数据,见表1。
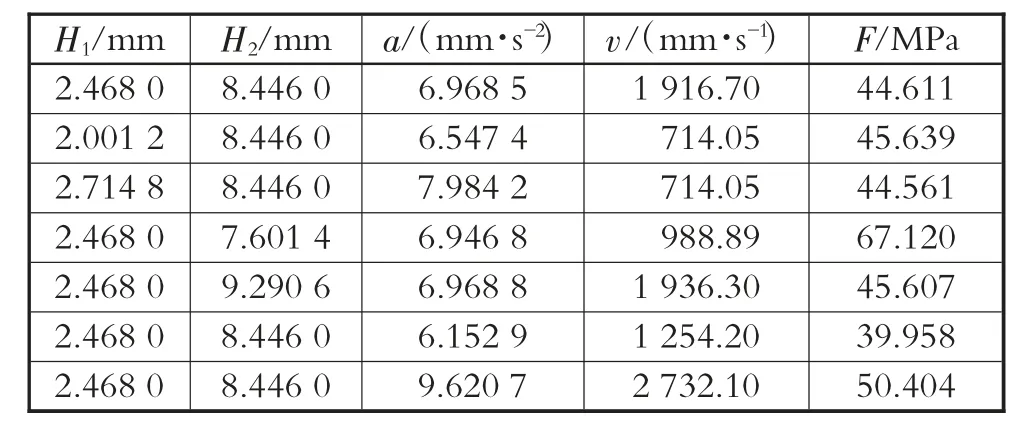
表1 优化设计点与对应目标值
在DX 优化前,对自变量进行敏感度分析,可总结出不同设计变量对目标变量的敏感度规律,见图6。
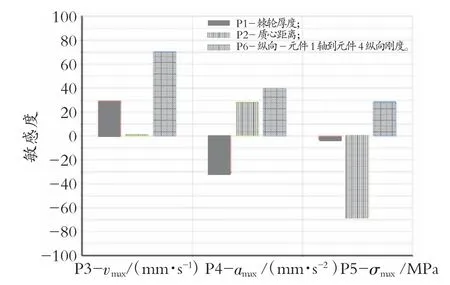
图6 参数敏感度
根据敏感区间的规律筛选出超越离合器棘轮厚度H1、棘轮质心平面与轮盘质心平面间的距离H2为最终的优化自变量。
在确立自变量及其敏感度对目标变量的影响规律后,使用响应面分析法,利用多元二次回归方程拟合因数与响应值之间的函数关系,通过分析回归方程来确立最优的结构参数,来解决多设计变量问题的参数寻优问题。本文基于神经网络方法拟合的响应面计算出样本点对应的目标变量数值。结果表明,基于神经网络算法的拟合方法具有较好的拟合效果,能够达到结构优化的目的。
对膝关节外骨骼人-机并联张弛穿戴系统下的超越离合器驱动单元进行动力学分析,根据上述优化方法,以上述优化自变量的初始值为优化前参考点进行虚拟样机仿真优化。超越离合器驱动单元结构优化前后对比见表2。
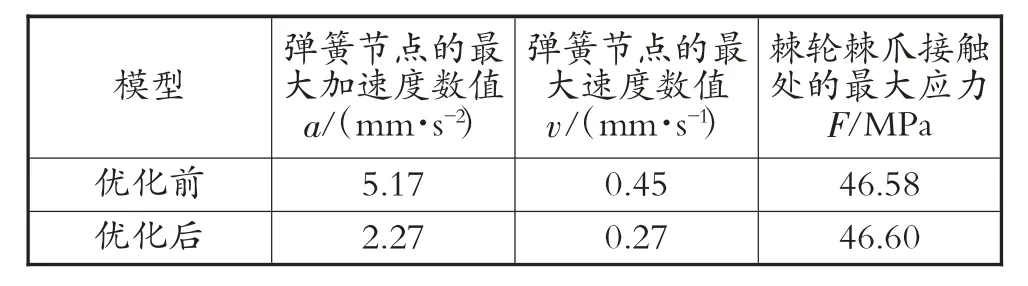
表2 系统整体结构仿真结果优化前后对比
5 结论
1) 设计了一种由超越离合器驱动且具有张弛功能的膝关节外骨骼人-机并联张弛穿戴系统研究原型,并对该系统进行刚柔耦合动力学分析。
2) 基于上述超越离合器驱动单元模型的分析结果,确立了棘轮厚度和棘轮质心平面与轮盘质心平面间的距离等要素为优化参数,以弹簧节点的最大加速度数值、最大速度数值和系统最大应力为优化目标,对该系统展开结构设计优化。
3) 对比优化前后数据,结果表明弹簧节点的最大加速度降低了56.09%,最大速度数值降低了40%,系统最大应力降低了4.25%,大大提高了膝关节外骨骼人-机并联张弛穿戴系统的动态性能指标。因此,该研究成果对外骨骼可穿戴性提高与优化设计,具有较好的借鉴意义。