石油钻机平移装置卡爪与滑轨失效分析
2021-12-22郭高垒刘杰刘双进
郭高垒,刘杰,刘双进
(中石化中原石油工程有限公司工程服务管理中心,河南濮阳 457001)
0 引言
同一井场钻多口井,可实现重复、批量化作业,“井工厂”钻井模式通常依靠钻机整体平移装置来实现[1],而步行器卡爪与滑轨作为陆地机械或混合动力石油钻机整体平移装置的主要承载部件,它们的失效直接影响着钻机平移。
目前,针对步行器失效方面的专题分析还很少,鉴于此,本文以一种棘爪步行器在钻机平移过程中出现的卡爪、滑轨损坏问题为研究切入点,以棘爪步行器为研究对象,利用力学原理与方法,对比分析不同工况下步行器部件间作用结果,从机理上剖析造成步行器卡爪与滑轨失效的根源。
1 步行器结构及类型
目前,陆地机械或混合动力石油钻机在同一井场各井口间短距离搬迁主要采用滑轨式整体平移装置,步行器主要采用楔块式与棘爪式,如图1所示。
棘爪式步行器是由楔块式步行器演变而来,在同一方向连续移动时,不需要人工操作步行器,降低操作劳动强度[2],其主要结构如图1(b)所示。棘爪步行器通过棘爪刃与滑轨棘爪孔板接触配合实现其作为钻机平移动力的基点[3],依靠液缸循环往复动作完成钻机在滑轨方向的连续步进移动。卡爪实现步行器在滑轨平面法向的位移限制,翻转手柄实现钻机平移方向的改变,同时对棘爪作用位置具有限位作用。

图1 步行器类型
2 步行器卡爪及滑轨失效型式
棘爪步行器卡爪失效主要表现在塑性变形与断裂破坏,如图2(a)、图2(b)所示。此种失效是由于滑轨与步行器相互作用力过大,造成卡爪力超过卡爪允许承载范围[4]。滑轨失效主要表现在滑轨面出现距离棘爪孔边缘一定距离的线状或面状连续压痕、滑轨面整体发生塑性变形或沿棘爪孔两侧边方向撕裂,如图2(c)、图2(d)所示。

图2 失效类型
现场统计发现,钻机平移装置步行器卡爪与滑轨的失效主要发生在步行器棘爪的限位手柄未安装或限位效果失效情况下进行的钻机平移,下面将针对步行器棘爪限位与不限位两种工况下步行器受力情况进行分析,从而发现棘爪限位与不限位对步行器卡爪和滑轨的影响。
3 步行器力学分析与求解
3.1 棘爪限位工况下步行器受力分析
在限位工况下,棘爪步行器沿滑轨面移动直至棘爪法向刃面滑入棘爪孔内,在液缸反向作用下,由于步行器棘爪翻转手柄的限位作用,限位手柄对棘爪产生作用力,此力阻止了棘爪围绕销轴的进一步转动,实现步行器棘爪竖向刃面与滑轨棘爪孔内侧面接触,滑轨对棘爪产生一个水平方向的作用力F1。
钻机平移过程中,忽略液缸安装误差,则液缸对步行器作用产生水平方向的作用力F0,滑轨下面分别对步行器前、后端的卡爪产生指向卡爪接触面方向的卡爪力P1、P2,滑轨上面分别对步行器棘爪座前、后端产生指向棘爪座接触面方向的正压力N1、N2,由于滑轨厚度δ小于步行器卡爪与棘爪座作用面之间的距离,所以在同一平移过程中滑轨对步行器同一端的作用力即卡爪力与正压力不会同时存在,由于步行器液缸力FO作用中心O1点高于棘爪安装中心O点,因此钻机推移过程滑轨对步行器的作用力组合为P1与N2组合,拉移过程为P2与N1组合。在钻机推移过程中步行器的受力情况如图3所示。
图3中:m为液缸作用中心高;n为棘爪作用中心高;t为棘爪竖向刃面作用距离;Δ为卡爪长度;O点为棘爪连接销轴中心;O1点为液缸连接销轴中心;O2点为棘爪座与滑轨接触点;L1为O点到前卡爪端面距离;L2为O点到后卡爪端面距离;L3为棘爪水平方向刃面长度。

图3 步行器受力示意图
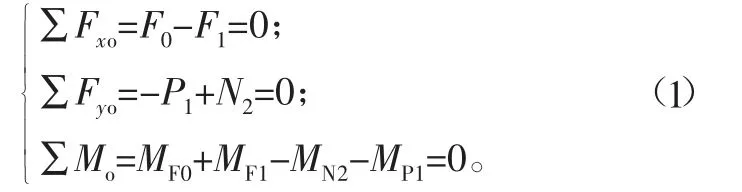
在受力分析中将步行器作为刚体,不考虑其自身变形的影响,由于其在滑轨法向对称面几何结构与受力情况的对称性,因此空间力系问题简化为平面力系问题,以步行器几何对称面为受力平面,以O点为简化中心,利用力的平移原理,分别建立步行器在推移与拉移两种状态下的力学计算模型[5]。棘爪限位工况下步行器平面力学计算模型如图4所示。
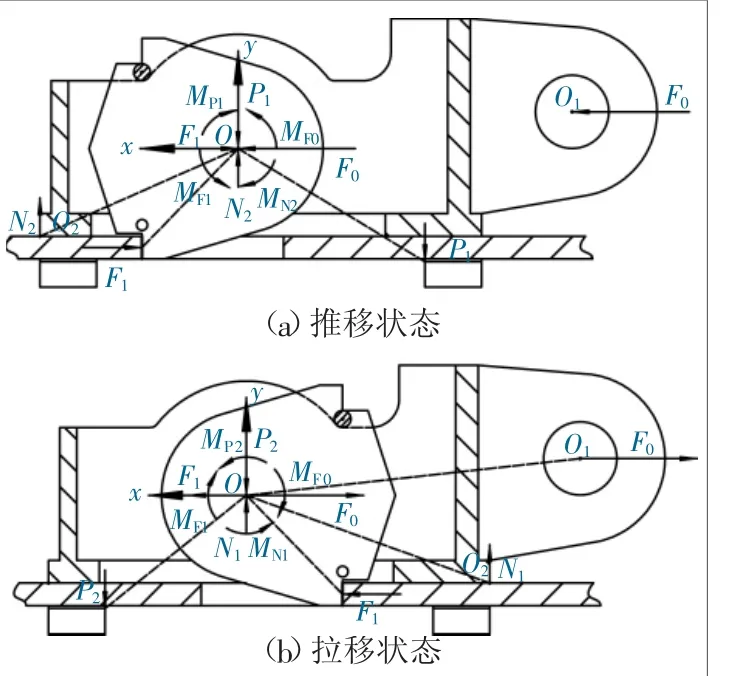
图4 棘爪步行器计算模型

在步行器推移状态下,依据平面力系平衡条件,对棘爪限位工况下图5中推移状态受力情况对O点建立力与力矩平衡式,推移状态下平衡方程为:
将上述参数代入式(1)并求解,获得钻机推移过程中棘爪限位工况下步行器棘爪力与卡爪力;同理对钻机拉移状态下列平衡方程,并代入求解。在棘爪限位工况下,最终获得钻机推移与拉移两种状态下步行器棘爪力与卡爪力的求解结果:

从式(2)发现,无论钻机推移还是拉移过程,滑轨对棘爪作用力F1值都等于液缸液力F0,步行器棘爪竖向刃面与滑轨棘爪孔内侧面接触作用,滑轨对棘爪产生一个水平方向的作用力F1;滑轨对棘爪座的作用力与对卡爪作用力大小相等,方向相反,在载荷一定情况下,无论是拉移状态,还是推移状态,其值都是一样的;推移过程滑轨对前卡爪作用力值P1等于其对棘爪座后端的作用力N2,即前卡爪受力,后卡爪不受力,拉移过程滑轨对后卡爪作用力值P2等于其对棘爪座前端的作用力N1,即前卡爪不受力,后卡爪受力。
3.2 棘爪无限位工况下步行器受力分析
无限位工况下,步行器在沿滑轨面滑移,直至棘爪竖向作用面滑入棘爪孔内,液缸反向作用力下,棘爪竖向作用面与棘爪孔侧面接触,由于步行器棘爪无限位作用,使棘爪绕棘爪连接销轴转动,直至棘爪水平方向作用面与滑轨上面点O3接触,产生一个沿O3点指向O点方向的作用力F,同时由于步行器与滑轨之间间隙的存在,步行器整体将向滑轨面法向平移,直至卡爪与滑轨下面接触,此时步行器棘爪可以简化成二力杆[5]。
分析中忽略液缸安装误差,则液缸对步行器作用力F0为水平方向,推移过程滑轨下面分别对步行器前、后端的卡爪产生指向卡爪接触面方向的卡爪力为P1′、P2′,拉移过程滑轨下面分别对步行器前、后端的卡爪产生指向卡爪接触面方向的卡爪力为P1"、P2",由于滑轨对棘爪产生作用力存在向上分力,所以滑轨上面与棘爪座是分离状态,即它们之间不产生正压力,步行器在上述力的共同作用下实现力学平衡,在钻机推移过程中步行器的受力如图5所示。图5中各尺寸含义与图3中一致,这里不再赘述。

图5 步行器受力示意图
利用上述棘爪限位工况下步行器受力分析方法,建立棘爪无限位工况下步行器平面力学计算模型,如图6所示。
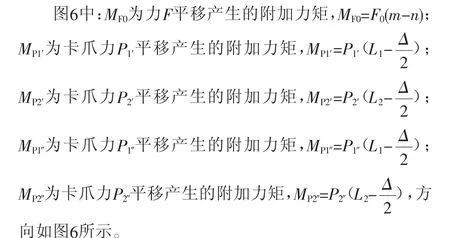
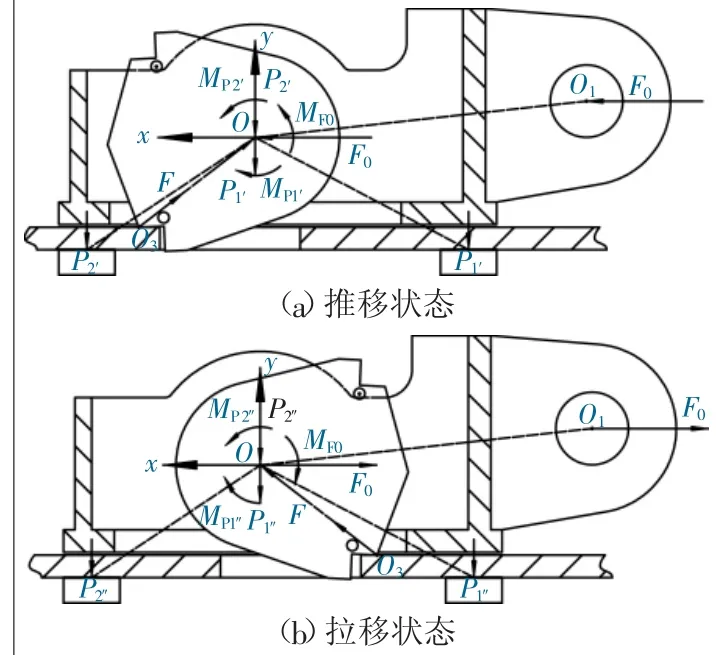
图6 棘爪步行器计算模型
利用上述棘爪限位工况下步行器两种状态下平衡方程建立的方法,图6中棘爪步行器推移状态下的平衡方程为:

将上述参数分别代入式(3)并求解,获得推移过程棘爪无限位工况下步行器棘爪力与卡爪力,如式(4)所示;同理对钻机拉移状态下列平衡方程,并代入求解,在棘爪无限位工况下,获得拉移状态下步行器棘爪力与卡爪力:

从式(4)与式(5)发现,无论是钻机推移过程,还是钻机拉移过程,滑轨对棘爪作用力F值为液缸液力FO及步行器结构决定的定值,棘爪水平方向刃面与滑轨上面产生接触作用,产生沿接触点指向棘爪连接销轴中心方向的棘爪力;滑轨对前、后卡爪都产生作用力,对棘爪座不产生作用力;推移过程中滑轨对前卡爪作用力值P1′大于拉移过程中的作用力值P1″,推移过程中滑轨对后卡爪作用力值P2′小于拉移过程中的作用力值P1″。
3.3 步行器力学模型实例求解与分析
下面以目前国内一些钻机平移采用的棘爪步行器实例进行分析,其结构尺寸如表1所示。

表1 棘爪步行器几何结构参数m
在钻机平移载荷一定(即液缸液力为定值)的情况下,将表1中结构参数分别代入棘爪步行器棘爪限位与不限位两种工况下的钻机推移与拉移状态的式(2)、式(4)及式(5)求解,获得不同工况下步行器与滑轨间作用力,其分析结果如表2所示。
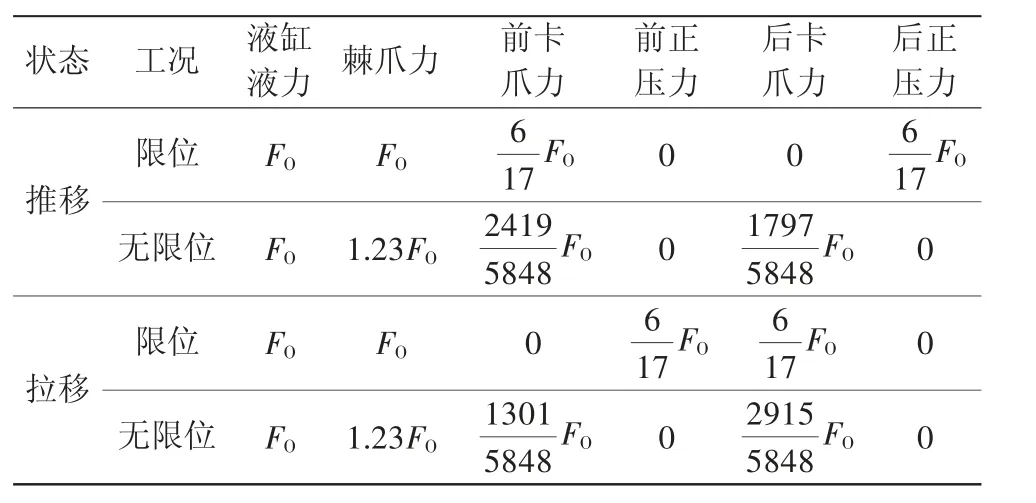
表2 不同工况下步行器与滑轨间作用力分析结果
表2结果表明:钻机平移载荷一定时,在不同工况下,由于步行器与滑轨受力状态发生变化,导致滑轨与步行器的作用力也是完全不同的;在同一工况下,步行器无论是推移状态,还是拉移状态,滑轨对棘爪作用力为定值,不同的是滑轨对卡爪与步行器棘爪座作用力分布位置及大小的变化;棘爪无限位工况下滑轨对棘爪的作用力是限位工况下的1.23倍,即增加23%,通过上述两种工况下棘爪受力分析,说明无限位工况下棘爪对滑轨作用面由限位工况下的竖向刃面变为水平方向刃面,作用力由水平方向变为沿棘爪回转中心指向与滑轨接触面(线),使滑轨上面产生了法向压力分量,这正是滑轨产生压痕及变形失效的一个关键因素。
进一步计算表明:钻机平移载荷一定时,在步行器推移过程中,棘爪无限位工况下的前卡爪力是限位工况的1.17倍,即增加17%,同时后卡爪也参与承载;在步行器拉移过程中,棘爪无限位工况下的后卡爪力是限位工况的1.41倍,即增加41%,同时前卡爪也参与承载。这正是卡爪变形及断裂失效的一个关键因素。
4 结论
1)通过棘爪步行器受力分析及计算结果对比发现,步行器棘爪无限位工况由于步行器受力状态发生变化,导致棘爪与滑轨相互作用力位置及大小改变,分析结果证明这一改变不利于滑轨承载,是加剧其失效的诱因。
2)进一步计算表明,钻机平移载荷一定时,在推移过程中,棘爪无限位工况步行器前卡爪力比限位工况下的前卡爪力增加17%,拉移过程步行器后卡爪力增加41%,这是棘爪无限位工况平移过程卡爪失效的一个关键因素。
