水下无线光动态通信技术与实验研究
2023-12-18王家兴张鹏赵雅刘传刘润芃杜扬凡佟首峰
王家兴,张鹏,赵雅,刘传,刘润芃,杜扬凡,佟首峰
(长春理工大学 空间光电技术国家地方联合工程研究中心,长春 130022)
0 引言
近年来,水下无线光通信(Underwater Wireless Optical Communication,UWOC)凭借通信速率高、通信时延低等优势在水下无线通信领域受到了广泛关注。但光束无线传输极易受到水下复杂信道的影响,难以维持稳定的信息传输[1],通信收发双端的光轴指向偏差会造成收端的光功率减小,通信效果变差,直至通信中断。
空间激光通信中的捕获、跟踪对准[2](Acquisition Tracking Pointing,ATP)系统已经成熟,部分系统拥有粗瞄和精瞄两级跟瞄系统[3-4]和四轴两框架的光电转台。2016 年,孟立新等[5]进行了两架固定翼飞机间距离10~144 km 的远距离捕获、跟踪试验,试验表明在实际机载环境下,粗跟踪精度优于25 μrad(1σ),精跟踪精度优于8 μrad(1σ)。2020 年,王伟[4]通过无迹卡尔曼滤波技术,对目标的运动轨迹进行预测,保证目标在精跟踪伺服单元视场内完成跟踪,系统粗跟踪误差控制在300 μrad 之内,系统精跟踪精度优于3 μrad。但这些系统复杂程度高,水下环境应用难度大,因此大部分水下无线光通信方案采用机械固定或人工调整的方式进行光路对准。为了降低发射端与接收端的对准难度,部分研究学者提出多输入多输出(Multiple Input Multiple Output,MIMO)技术[6-8],即采用发光二极管(Light Emitting Diode,LED)阵列及探测器阵列的方案,在不提高系统机械结构复杂程度的情况下提高系统通信性能,但这种方法会增加系统的成本和通信链路的自由空间损耗,降低发射端光功率利用率[9-12]。
2017 年WILLIAMS A J 等[13]研究了水下激光捕获跟踪的双向通信系统。该系统在水下环境中利用可变发散光束,结合宽视场互补金属氧化物半导体(Complementary Metal Oxide Semiconductor,CMOS)相机进行链路粗捕获,并采用四象限探测器进行精跟踪,实验展示了两个水下节点的双向稳定的通信链路搭建。2019 年,刘雨享[14]设计了一套基于全球定位系统(Global Positioning System,GPS)的水下光通信系统精确对准方案,先利用GPS 浮标进行粗定位,再由粗瞄到细瞄,实现光路精确对准,同时运用蒙特卡洛算法,通过仿真得出最佳扫描步长。2021 年,贺锋涛[15]搭建一套基于激光二极管的水下无线光自动对准系统,在一维平台移动的情况下实现链路的对准,最大误差角为0.109°,同时在衰减为1.7 dB/m 的水池中实现了30 m 距离的语音通信;同年SAIT M[16]采用闪烁光纤作为探测器光学天线,拥有近360°的接收视场,降低了光路对准难度,系统采用开关键控(On-Off Keying,OOK)调制和雪崩光电探测器(Avalanche Photo Diode,APD),通信速率达250 Mbps/s。
激光二极管(Laser Diode,LD)具有束散角小、功率高的特点,适合水下远距离通信,实验使用450 nm 蓝光激光器作为通信光源。相较于空间激光通信系统,水下激光通信系统通信距离较近,通信光路对准精度要求也随之降低,因此针对传统ATP 系统进行了优化,使其更适应于水下环境。方案设计上简化系统结构,采用CMOS 相机及二维光电转台作为跟瞄系统,同时安装大口径光学天线以降低光功率损耗,提升通信距离,实现对微弱信号光的探测。
基于伺服系统设计了捕获视场大、对准精度达毫弧度级的动态水下无线光通信系统,并完成了工程样机的设计和性能测试。结果表明该系统可以快速完成光斑对准,实现稳定的水下通信。
1 海水信道分析
1.1 海水的光学特性
对于水下无线光通信系统,海水信道是一个衰减信道,发射端的调制光信号在水下传输过程中受水分子和浮游生物、悬浮颗粒等其他物质的作用产生吸收和散射[1],海水对光的吸收及散射作用如图1。
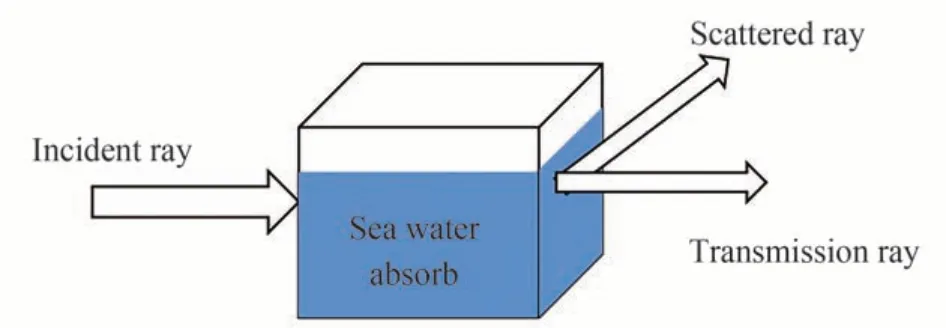
图1 海水对光束的吸收与散射Fig.1 Absorption and scattering of ray by seawater
吸收效应是指介质中的分子吸收光子并将其转化为热能或化学势能的不可逆过程,散射效应是指光子入射到介质中后偏离原来方向传播的过程。若光信号衰减过大,到达接收端的光信号过弱无法被探测,会导致通信中断。近岸海水有较多的浮游生物等有机物,此时主要影响光信号衰减的因素是纯海水散射和悬浮颗粒的散射,其中纯海水散射公式可以表达为
式中,bW(λ0)为参考波长的散射系数,bW(λ)为确定波长的散射系数。利用光谱散射函数模拟光在水中散射情况并在散射方向进行积分,得出散射常数b(λ)为
相比沿岸近海,深海中浮游生物及其他有机物悬浮颗粒较少,此时影响光信号衰减的因素是纯净海水的吸收及其它溶解的无机盐(NaCl、KCl、CaCl2)的吸收,海水对光信号的吸收系数α(λ)表达为
式中,aw(λ)为纯净海水的吸收,ay(λ)为海水中黄色物质的吸收,ap(λ)为浮游生物的吸收,aNAP(λ)为海水悬浮颗粒的吸收。
衰减效应是吸收效应和散射效应的叠加,即衰减系数c(λ)为吸收系数和散射系数的线性组和,可以表达为
1.2 自由空间损耗
自由空间损耗也称为几何衰减,只与光源发散角、传播距离、探测器面积等有关,与传播介质无关。理想情况下光源可以被视为点光源,最大光强在光轴方向,几何模型如图2。
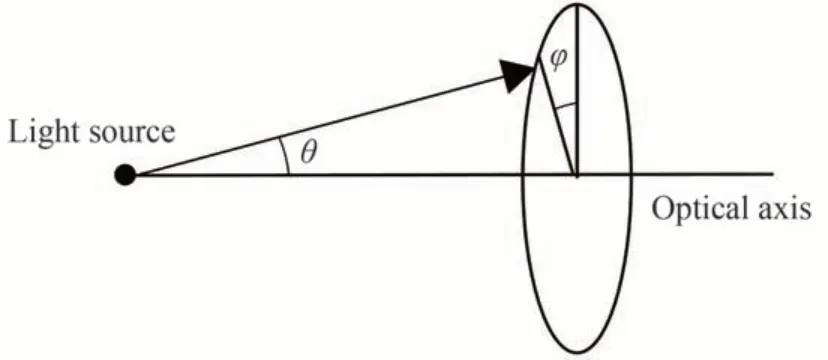
图2 光源模型Fig.2 Light source model
光强矢量m可以表示为[17]
式中,θ1/2为m方向与光轴夹角的一半,则光源的光强分布可以表示为
R(θ,φ)表示(θ,φ)方向上辐射强度强大小。
自由空间损耗模型如图3。光源输出光信号,在不考虑海水的散射和吸收衰减效应的情况下,到达探测器接收端的光功率可以表示为
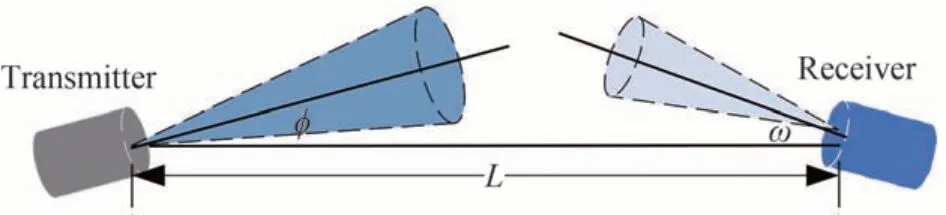
图3 自由空间损耗模型Fig.3 Free space loss model
式中,PT为光源输出的光功率,m与光源半角功率相关,ϕ为光源发散角,A为接收端光学天线面积,η为发射端和接收端光学效率之积,ω为接收端接收角,L为发射端和接收端的距离,T为光学器件的透过率,G为接收端光学天线的增益。因此通信链路的自由空间损耗可以表示为
理想状态下,发射端与接收端通信光路完全对准,此时式(8)中ϕ及ω均为0,通信链路自由空间损耗为
2 系统组成
2.1 发射系统
发射系统由发射光源、激光驱动、信号处理模块构成。光源作为无线光通信系统核心元件,其选择直接影响到系统的性能指标。由于LED 发散角较大,在远距离水下光通信链路中有较大的自由空间损耗,而激光二极管不仅能产生高功率辐射,且光束发散角窄,可以进行高速信号直接调制,更适合作为高速长距离水下无线光通信系统光源。因此选用LD 作为发射光源。发射系统采用信标光与信号光一体的方式,即信号光的光斑同时作为伺服系统的对准对象。
信号处理模块包括可编程阵列逻辑(Field Programmable Gate Array,FPGA)单元和D/A 转换模块,FPGA 逻辑单元输出伪随机码,使用排线与D/A 模块连接,通过D/A 模块将数字信号转换为模拟信号,发射系统的主要结构器件如图4。
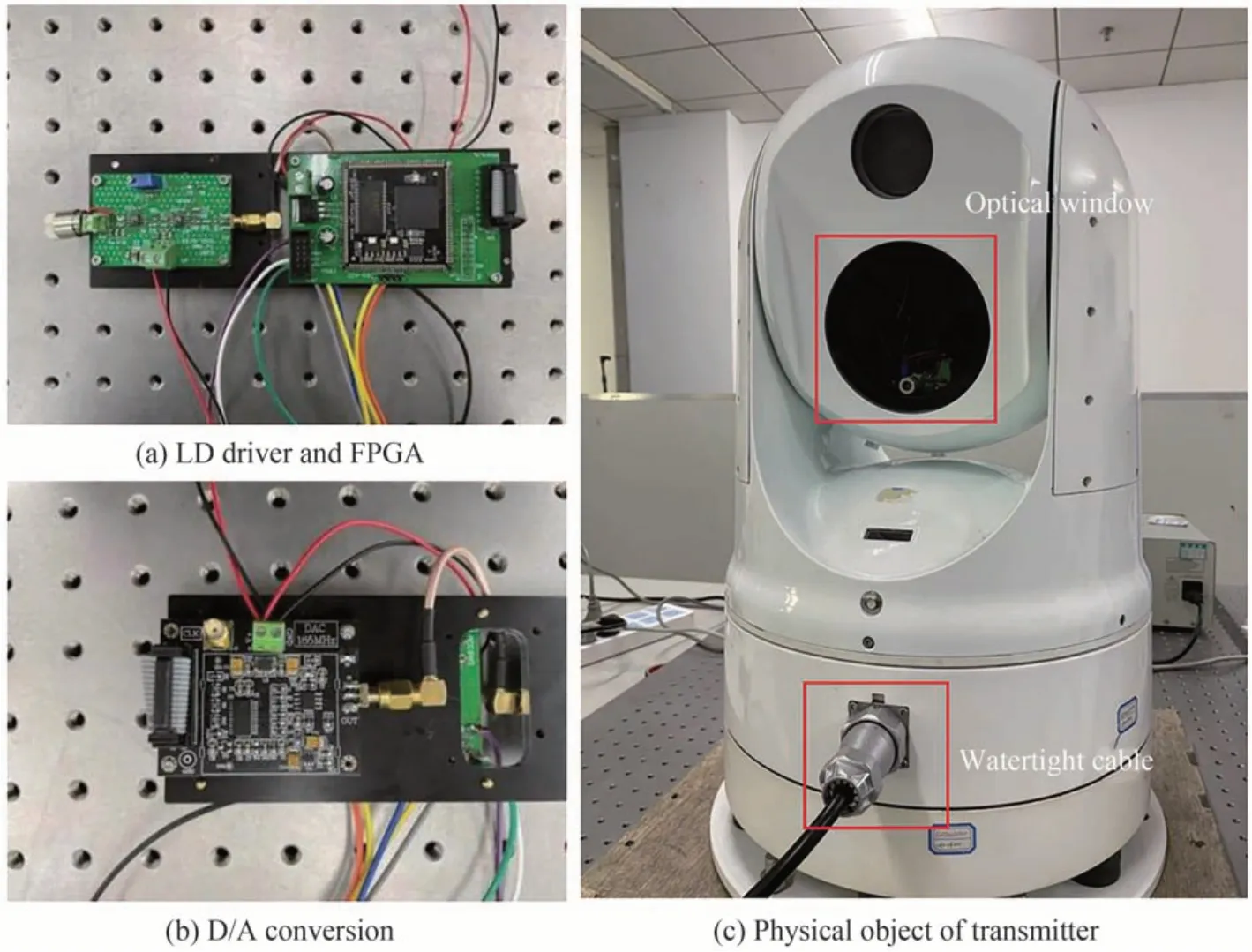
图4 发射系统元件实物Fig.4 Main structural components of the transmitter and physical object
2.2 接收系统
接收系统由光学天线、光电探测器、时钟数据恢复(Clock Data Recover,CDR)模块组成。为了使探测器有较大的接收视场,同时降低链路自由空间损耗。选用大口径菲涅尔透镜作为接收端光学天线[18-19]。光电探测器选用HAMAMATSU 的C12702,APD 探测器靶面直径3 mm,波长响应从200 nm 到800 nm,截止频率40 MHZ,模块内置温度补偿偏置电压电路通过温度传感器控制偏置电压,维持探测器增益恒定,在25 ℃的工作环境下,APD 对于波长450 nm 的蓝光响应度达1.1×104V/W,增益达30。将探测器模块安装在菲涅尔透镜焦点处,信号光经过透镜会聚在探测器靶面转换为电信号输出。CDR 模块恢复数据信号和时钟信号,对输入的电信号进行滤波去噪和解码输出需要的数据。探测器将调制光信号转换为电信号由同轴电缆接口传输到CDR 模块,数据信号通过防水电缆输出。接收系统主要元件以及光电转台整体如图5。
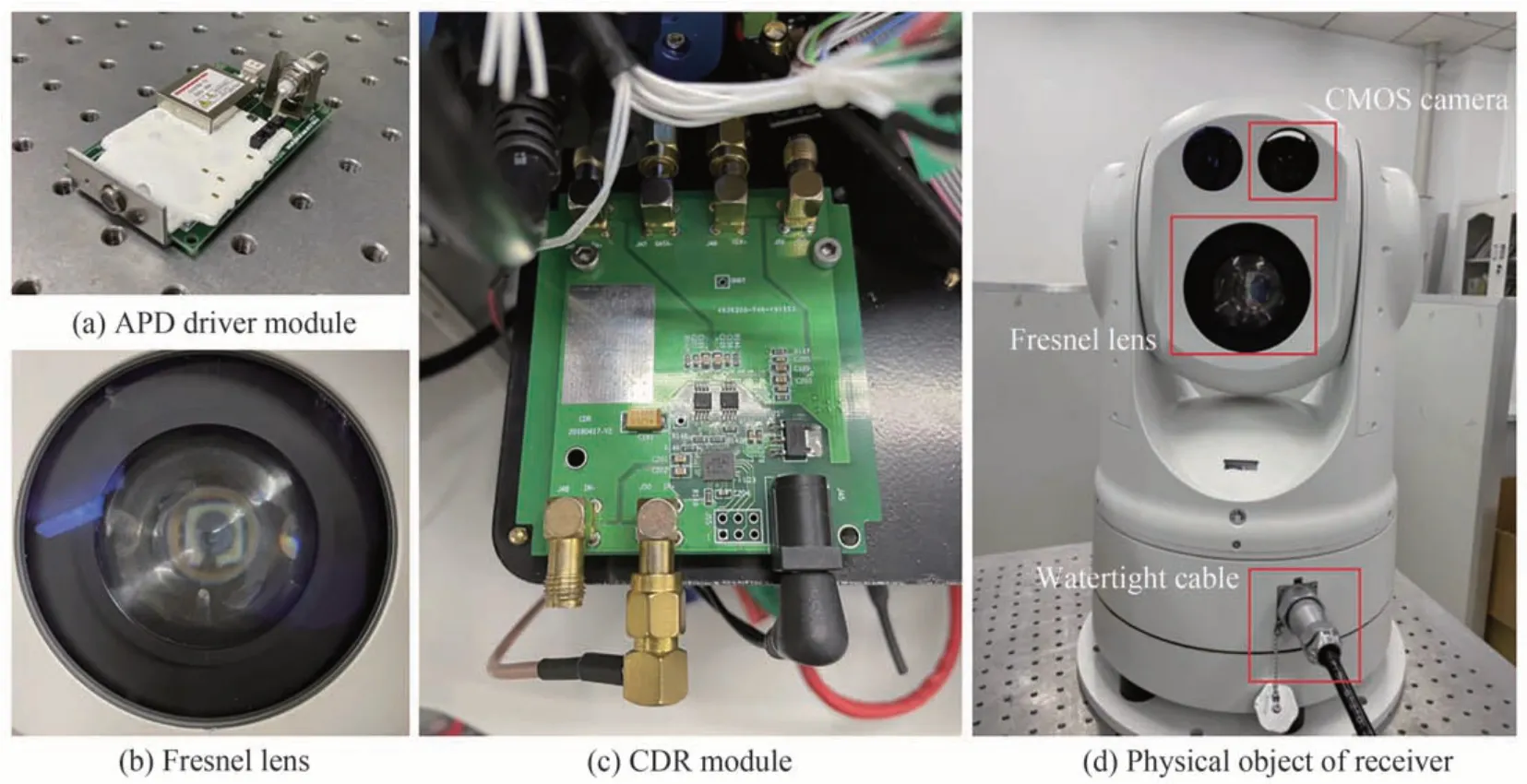
图5 接收系统主要元件及实物Fig.5 Main structural components of the receiver and physical objects
2.3 伺服系统
伺服系统用于完成对水下光斑的捕获对准,伺服系统包含二自由度光电转台、控制算法、伺服总控、电机驱动、PC 上位机和CMOS 相机,部分元件如图6、7。
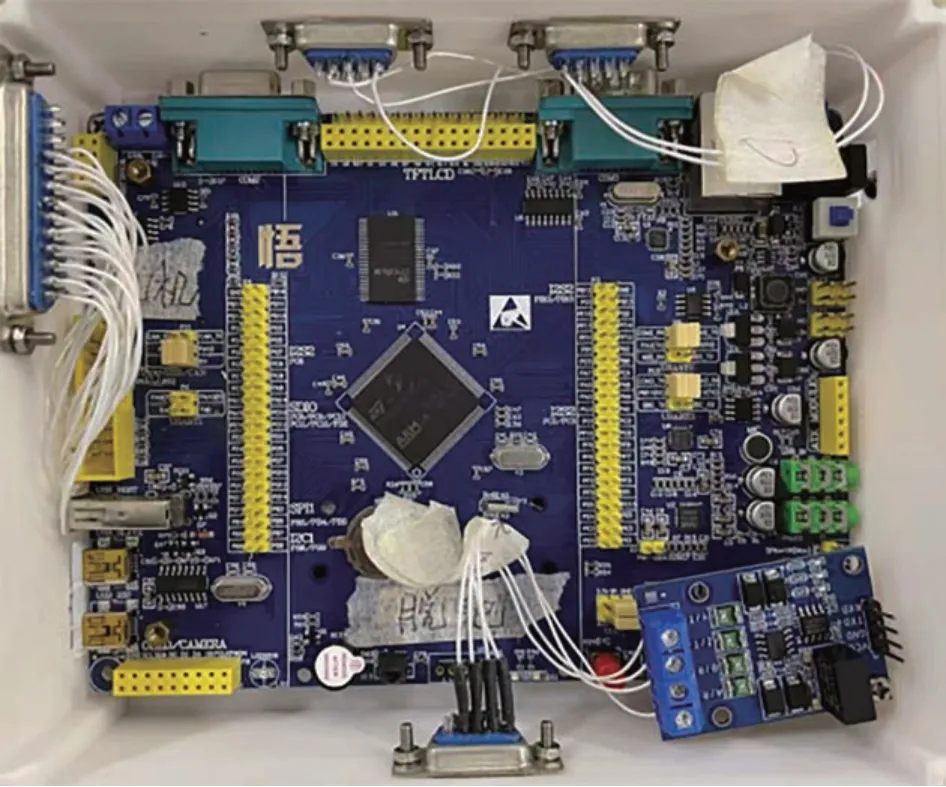
图6 伺服总控Fig.6 General control of servo
选用防水光电转台,方位轴和俯仰轴均为步进电机驱动,方位转速最快18°/s,俯仰转速最快12°/s,水下工作深度1 m,CMOS 相机集成在转台内部,相机全视场为20°。伺服总控选用STM32F407 作为控制单元,对脱靶量数据解包并完成光电转台的控制。伺服系统工作流程为:CMOS 相机采集视频图像,传递给PC 上位机,完成对目标的采集与标定;相机捕获分布在不同位置的光斑后将原始脱靶量数据通过串口传输给伺服总控,控制算法对原始脱靶量数据进行解算,输出光斑位置坐标并通过串口向光电转台发送位置控制指令,不断调整CMOS 相机十字中心与目标光斑间相对位置,从而达到发射端和接收端的链路对准。系统工作原理如图8。
除硬件组成外,光斑对准的控制算法也是伺服系统重要的一部分,设计了一套电机控制算法,依据相机反馈脱靶量数据调整电机方位及俯仰,完成光斑对准。初始时刻完成发射端光斑位置调整及相机启动,脱靶量完成坐标转换后进行光斑对准,算法获得光斑坐标后对x和0 进行比较,当x>0,控制方位电机右转,反之则左转,直到方位坐标x等于0,移动结束,俯仰轴对准流程与方位轴相同。具体流程如图9。
3 实验与结果
3.1 实验测试环境
受环境条件限制,装置的测试在室内进行,系统搭建如图10,使用装满自来水长1 m 的水箱模拟水下信道,通信发射端集成在右侧转台内部,通信接收端集成在左侧转台内部。转台A 作为发射端,转台B 作为接收端,对水下通信系统和伺服系统进行测试。表1 为发射端和信道参数。

表1 实验参数Table 1 Experimental parameters
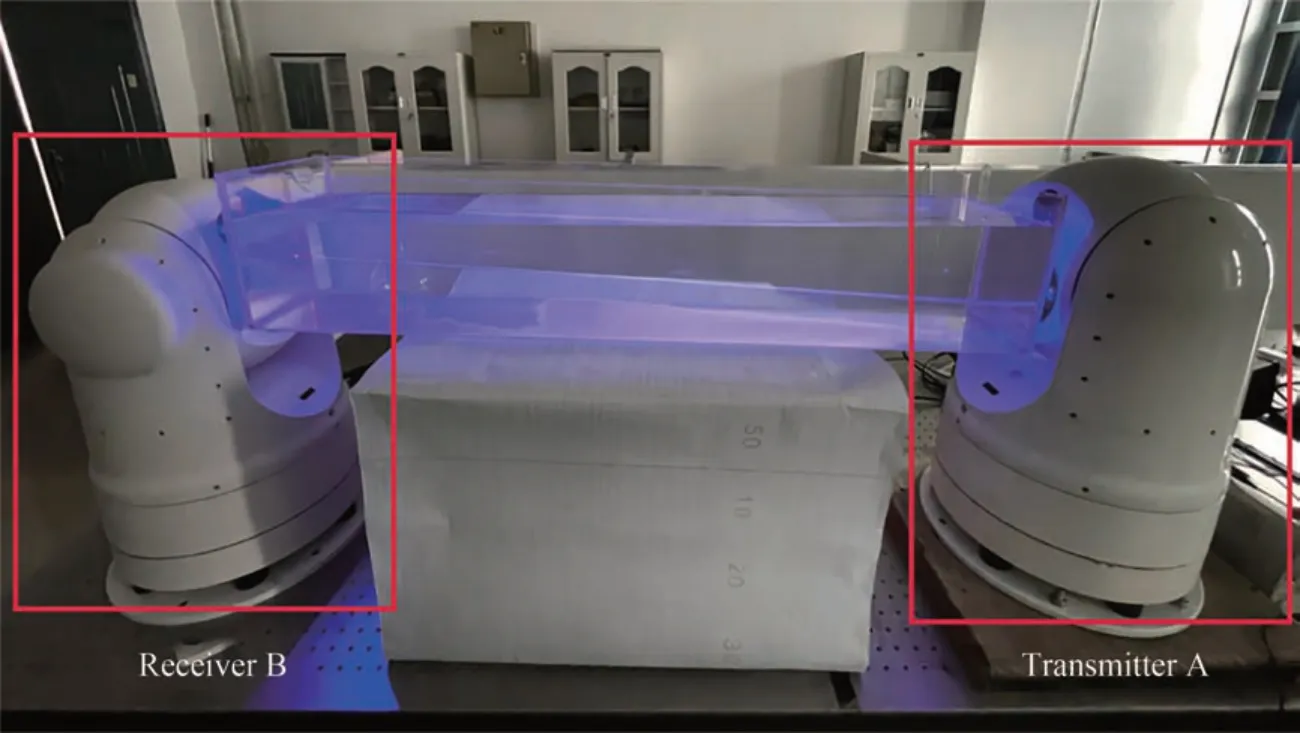
图10 实验环境Fig.10 Experimental environment
3.2 伺服性能测试
实验中激光通信系统的发射端和接收端分别搭载在转台A 和转台B,通过调整转台A 的方位俯仰来模拟水下环境中不同位置的光斑,发射端光功率为16 mW。当水下光斑出现在CMOS 相机视场时伺服总控对脱靶量进行解包并向转台B 发送捕获对准指令,控制转台B 进行光斑对准。图11(b)、(c)、(d)展示了转台B对水下光斑的完整捕获对准过程。
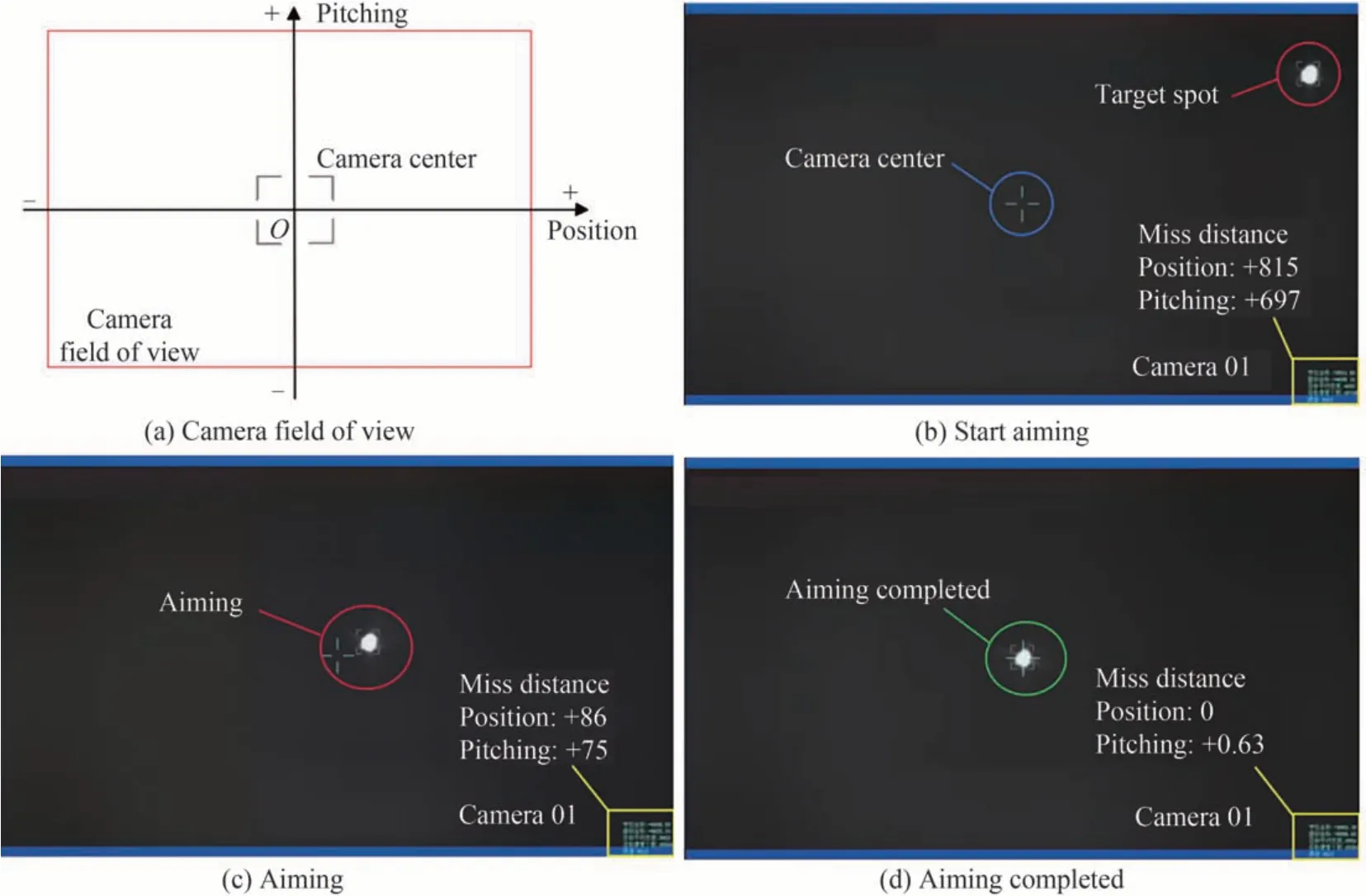
图11 水下光斑对准过程Fig.11 Underwater spot aiming process
相机视场划分如图11(a),整个视场被划分为四个象限,初始时刻水下光斑位于相机视场第一象限,获取脱靶量数据后伺服系统开始进行对准。图11(d)为完成光斑对准的视频图像,此时方位脱靶量为0,俯仰脱靶量为0.63,光斑对准耗时8.2 s。
完成光斑对准后,图12、13 给出了对准状态下相机输出的对准误差曲线,图中横轴为实验时间,采样间隔200 ms,采样时间10 000 ms;纵轴为采样得到的脱靶量大小,其中图12 的X脱靶量为方位脱靶量变化情况,图13 中Y脱靶量为俯仰脱靶量变化情况。
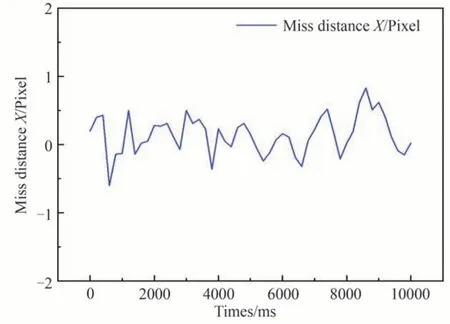
图12 方位脱靶量Fig.12 Miss distance of position
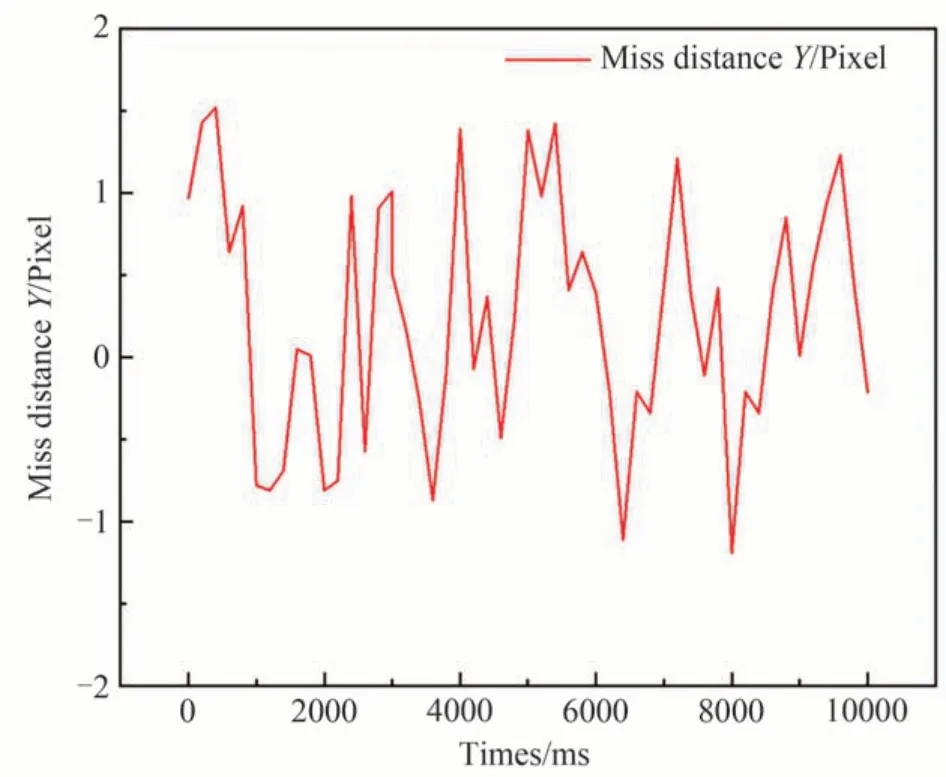
图13 俯仰脱靶量Fig.13 Miss distance of pitching
对方位轴和俯仰轴采样得到的脱靶量数据进行统计分析,分别得到方位和俯仰的脱靶量分布直方图。由图14、15 可知方位轴对准误差脱靶量为0.99(3σ),俯仰轴的对准误差脱靶量为2.46(3σ)。相机视场为20°,方位轴和俯仰轴像素数均为2 048,计算方位轴对准误差为0.17 mrad,俯仰轴对准误差为0.42 mrad。
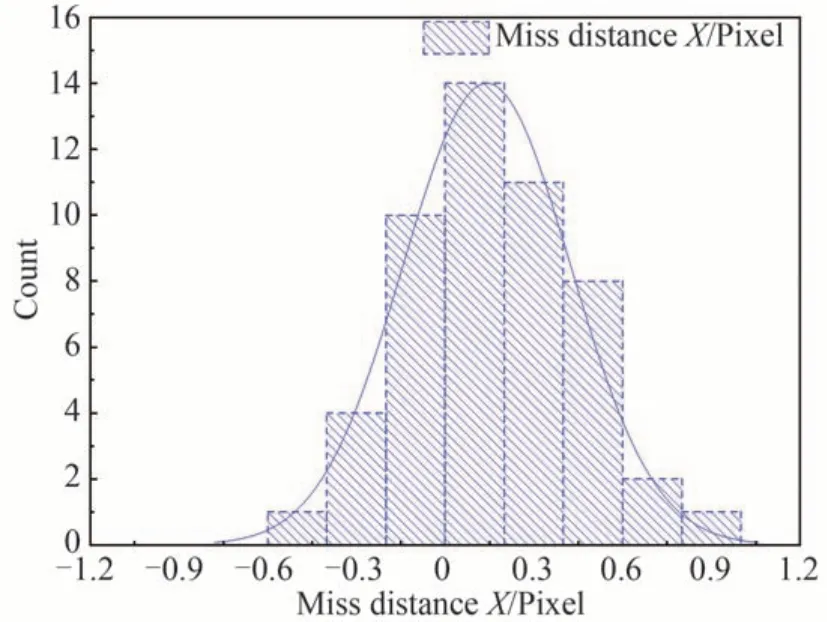
图14 方位脱靶量分布直方图Fig.14 Miss distance of position histogram
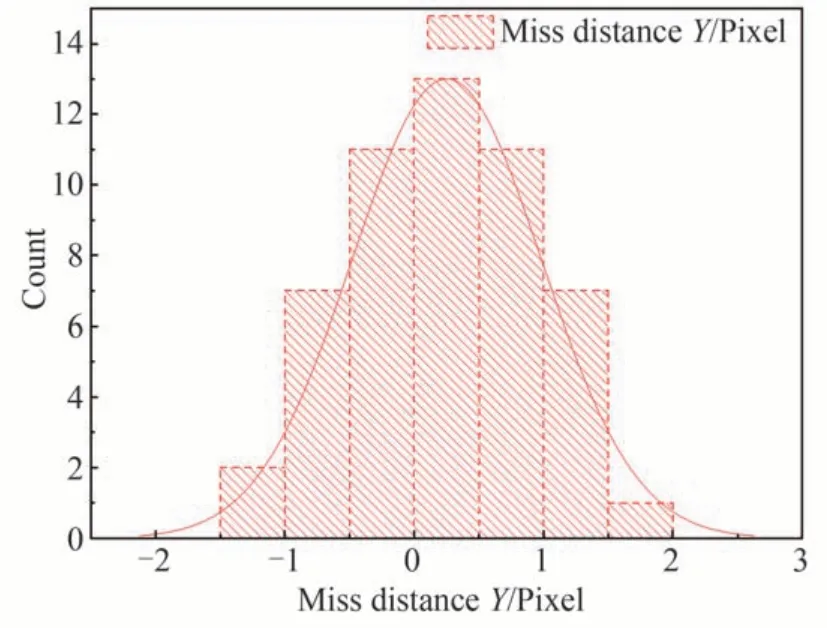
图15 俯仰脱靶量分布直方图Fig.15 Miss distance of pitching histogram
室内实验结果表明伺服系统可以完成相机视场内不同位置的光斑对准,系统运行正常,可以搭建起水下光通信链路,为后续通信性能测试做准备。
3.3 通信性能测试
为了检测系统在水下信道中的通信性能,在水箱环境中对发射系统和接收系统进行信号传输测试。测试过程中使用到的仪器有稳压电源、FPGA 逻辑单元、数字示波器、数字万用表、数字误码仪等。接收端包括接收天线、光电探测、CDR 模块等。实验框图如图16。
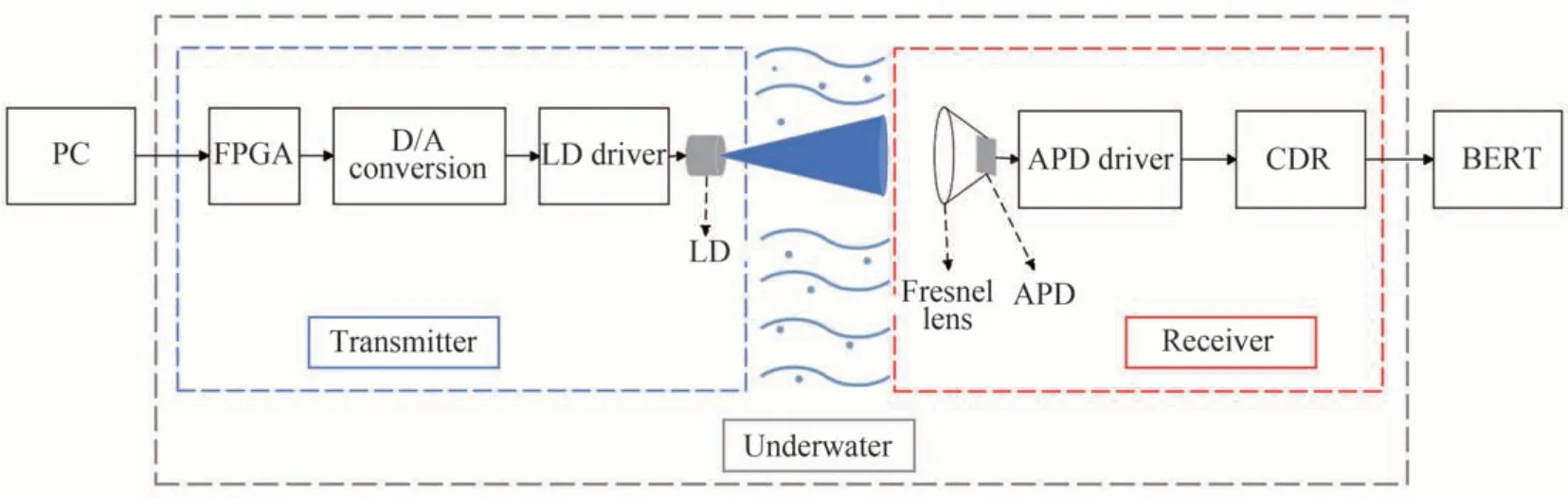
图16 水下通信实验框图Fig.16 Block diagram of underwater communication experiment
实验使用发射端的FPGA 产生PRBS_7 伪随机码序列,并在FPGA 中完成数据编码和OOK 调制,输出的数字信号经过D/A 模块转为模拟信号加载到激光器驱动,输出调制光信号。光信号经过水下信道后被菲涅尔透镜会聚在探测器靶面,探测器模块输出电信号到CDR 模块。CDR 恢复数据时钟信号返回到误码仪,可以准确测量通信误码率。
伺服系统完成光路对准后,将接收端CDR 输出的数据时钟信号接入数字示波器和误码仪,保持系统其他通信参数不变的情况下,改变加载到光源的调制信号速率B,将通信误码率维持在10-6级,同时对发射端光功率进行控制,分别测量在10、20、30、40、50 Mbps 通信速率下恰好使APD 探测器响应的最小信号幅值Vmin和误码率。根据该探测器在450 nm 处响应度R450nm计算接收端探测器灵敏度PAPD。
通信性能测试结果如表2。

表2 不同通信速率下的测试结果Table 2 Experimental results under different communication rates
由表2 可知随着通信速率的提升,UWOC 系统通信误码率也逐渐增加。在通信速率为50 Mbps 时仍有较低的误码率,满足数据传输要求,并且系统在50 Mbps 速率的范围内均能保持优于-25 dBm 的灵敏度,在10 Mbps 的速率下灵敏度可以达到-30 dBm,可实现水下环境中的弱光信号探测,保证水下无线光通信链路的稳定性。
4 结论
本文设计了基于伺服系统的动态水下无线光通信系统,对系统的硬件及控制算法进行了介绍,利用长1 m 的装满自来水的水箱模拟水下信道,对伺服系统和通信功能进行了测试。实验结果表明,该系统可以实现20°大视场光斑捕获对准功能,对准耗时8.2 s,能够建立稳定的水下无线光通信链路,在误码率为2.63×10-6的条件下实现50 Mbps 的通信速率,验证了基于伺服系统的水下无线光通信方案可行性,解决了通信光路对准困难的问题,为水下无线光通信组网奠定了理论和工程基础。在此基础上可以研制出通信链路更稳定、通信距离更远的水下无线光通信组网系统。