清洁装置自动化控制系统的研究与实现
2023-12-14黄俊生
黄俊生
(凌度(广东)智能科技发展有限公司,广州 510000)
0 引言
随着城市化进程的不断加速,高层建筑在城市景观中占据重要地位。然而,高楼幕墙的清洁一直是一个具有挑战性的问题。传统的清洁方法通常依赖于危险的高空作业,效率低下且存在安全隐患。因此,开发高效、安全且环保的高空清洁技术对于维护城市建筑的外观、卫生和可持续性至关重要。尽管一些传统的清洁方法存在,但它们在提高效率、保障安全以及环保方面仍存在不足。为了填补这一技术空白,本研究的动机和目的是开发一种先进的高空清洁装置和自动化控制系统,利用机器视觉技术,使清洁装置具备自主感知和智能路径规划的能力,从而显著提高清洁效率和安全性[1]。此外,还致力于设计污水回收系统,以解决污水排放和环境污染问题。通过这些创新方法,旨在满足现代城市建筑清洁的需求,提高清洁效率,同时改善城市环境卫生,实现可持续性发展。
1 机器视觉概述及其在清洁装置中的作用
1.1 机器视觉技术的概述
机器视觉,作为一种现代计算机视觉领域的技术,利用计算机算法和摄像头等传感器来模拟和改善人类视觉。其原理与基本概念包括图像采集、图像处理、特征提取、目标检测和分类等关键要素[2]。
1.2 机器视觉概述及其在清洁装置中的作用
1.2.1 自主感知与环境理解
机器视觉使清洁装置具备自主感知和环境理解的能力。通过分析实时图像,清洁装置能够了解其周围环境,包括建筑物外墙的结构、高度、材料和污垢分布等。这种环境理解有助于清洁装置做出智能决策,选择最佳的清洁路径和方法。
1.2.2 路径规划与目标检测
机器视觉技术还用于路径规划和目标检测。清洁装置需要确定最有效的清洁路径,以确保整个清洁过程高效完成。机器视觉可以检测到窗户、墙壁和其他目标物体的位置,从而帮助清洁装置规划避开障碍物的路径。同时,它可以监测清洁进度,确保每个区域都得到适当的清洁。
2 自动化控制系统的设计与架构
本文提供了清洁装置自动化控制系统构造的机器人,其可以实现以下功能:吸附功能、移动功能、清洗功能,对墙面污水及墙面上方的雾化污水进行快速抽吸和分离回收,极大地提高清洁效率,其结构如图1 所示。

图1 机器人结构图
2.1 系统设计原则
2.1.1 功能需求分析
在设计自动化控制系统之前,首先需要进行详细的功能需求分析。针对高空幕墙清洁机器人,功能需求可能包括清洁路径规划、障碍物检测与回避、清洁效率优化等。通过充分了解系统应该完成的任务,可以为后续的设计提供明确的目标[3]。
2.1.2 系统可行性评估
在确定功能需求后,需要进行系统可行性评估。这包括技术可行性、成本可行性和安全可行性等方面的考虑。例如,需要评估可用的传感器技术、控制器性能和清洁装置的成本效益。同时,也要确保系统设计能够满足安全标准,以防止潜在的风险。
2.2 控制系统硬件与传感器
2.2.1 传感器选择与布局
自动化清洁装置的性能依赖于传感器的选择和布局。合适的传感器可以提供关键的实时数据,例如高度、距离、位置和环境条件等。常见的传感器包括激光测距仪、摄像头、惯性测量单元(IMU)等。传感器的布局应该覆盖整个清洁装置,以确保全方位的环境感知。
2.2.2 控制器与执行器
控制系统的核心是控制器和执行器。控制器负责处理传感器数据并执行相应的控制算法。执行器是清洁装置的机械部件,例如电机、液压缸等,用于执行清洁任务。控制器和执行器之间需要高效的通信和协调,以确保清洁装置按照预定的路径和操作完成任务[4]。
2.3 控制系统软件
2.3.1 实时操作系统的选择
为了确保清洁装置的实时性和稳定性,需要选择合适的实时操作系统(RTOS)。RTOS 能够确保任务按时完成,对于高空幕墙清洁机器人的安全和性能至关重要。
2.3.2 控制算法与路径规划
控制系统的软件包括控制算法和路径规划算法。控制算法负责根据传感器数据调整执行器的操作,以保持清洁装置在执行任务时的稳定性。路径规划算法用于确定最佳的清洁路径,考虑到建筑物结构和障碍物位置,以提高清洁效率[5]。
通过以上的系统设计原则和控制系统硬件、软件的考虑,可以建立一个高效、稳定且满足功能需求的自动化控制系统,为高空幕墙清洁装置的设计与操作提供强大的支持。这些关键因素的合理考虑将有助于确保系统的性能和安全。
3 实验分析
3.1 实验设备及环境
本研究进行了一系列实验,旨在验证高空清洁装置及其自动化控制系统的性能。实验所用平台包括一个模拟高层建筑幕墙结构,以及自行研发的清洁装置和控制系统。
实验环境考虑到了模拟不同气象条件的需要,其中包括高风速、低温等极端气象条件。这些实验环境的模拟有助于评估清洁装置在各种不同气象条件下的稳定性和性能[6]。
3.2 实验过程分析
3.2.1 负载能力模拟实验
清洁装置自动化控制系统构造的机器人在高空玻璃壁面上工作时,需要携带电线、真空管等设备,这就要求爬壁机器人要具有一定的携带负载的能力。根据设计指标,爬壁机器人一般能够携带重量为15kg 负载,下面对爬壁机器人的负载能力进行试验[7]。
如图2 所示,选择金属杠铃片作为负载,每片杠铃片重1.25kg,爬壁机器人位姿设置为极限工况条件,即内框架上真空吸盘组处于吸附在壁面状态,外框架上真空吸盘组处于脱离壁面状态,并且外框架竖直向上运动到极限位置。将杠铃片挂在机器人本体上且依次增加杠铃片数量,观察真空吸盘组是否发生倾覆或打滑,并记录实验数据,当机器人发生倾覆或打滑时,立即停止实验。

图2 清洁装置自动化控制机器人负载实验
清洁装置自动化控制机器人不同负载重量下的失效情况如表1 所示。

表1 不同负载机器人吸附情况
根据表1 可知,清洁装置自动化控制机器人在负载17.5kg 时出现了打滑现象,没有出现倾覆现象,本文设计的清洗机器人要求负载不高于15kg,因此符合技术要求。
3.2.2 运动性能实验
运动性能是衡量一款清洁装置自动化控制机器人设计的成功与否的重要指标,因此,在制作完清洁装置自动化控制机器人的样机后,需要对其运动性能如移动速度、移动步距、吸附稳定性等进行一系列的实验[8]。
由于本文设计的清洁装置自动化控制机器人尺寸较大,所需实验空间也较大,因此选择实验室的钢板壁面进行运动性能实验。为了防止清洗机器人在实验时发生意外坠落,使用防坠器对机器人采取保护措施,设计的清洁装置自动化控制机器人移动方式,分别对机器人竖直方向、水平方向以及斜向运动进行实验,运动过程如图3 所示。
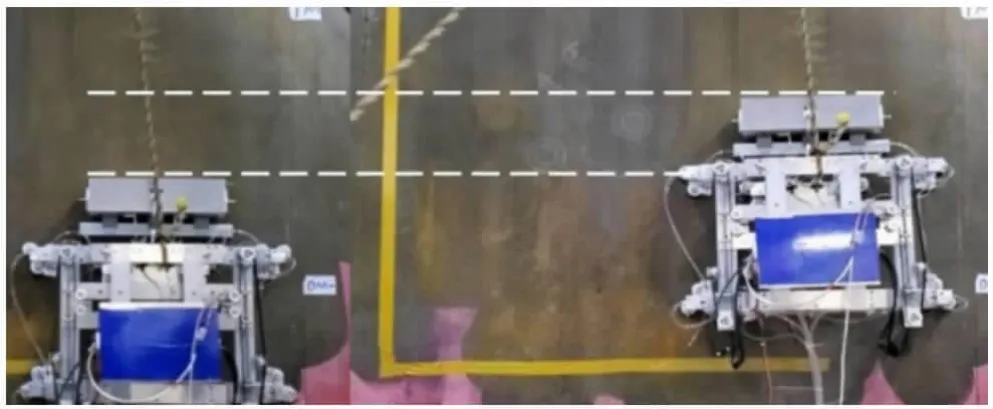
图3 清洁装置自动化控制机器人运动步态
经过采集多次实验所得数据,得到清洁装置自动化控制机器人各方面性能如表2 所示。

表2 清洁装置自动化控制机器人各项性能
通过多次实验可以发现,清洁装置自动化控制机器人在竖直壁面能够顺利实现各方向的运动,移动速度与移动步距达到设计要求,内、外框架交替时稳定性较好[9]。
3.2.3 壁面适应能力实验
清洁装置自动化控制机器人不仅仅是在高空玻璃清洗行业内具有较高的需求,在其他行业中也拥有广阔的前景,如高空检测作业、墙面滚涂作业等。本文设计的高空玻璃幕墙清洗机器人利用多个真空吸盘组将机器人本体吸附在壁面上,并且能够在多种不同材料壁面上进行移动,如玻璃壁面、水泥壁面、钢板壁面、不锈钢门壁面等。对清洗机器人壁面适应能力进行实验,对于拓展清洗机器人的工作环境以及实现不同的功能具有重要意义[10]。
如图4 将清洁装置自动化控制机器人分别在玻璃壁面、水泥壁面、钢板壁面以及不锈钢门壁面进行移动,实验结果表明,爬壁机器人在这4 种不同材料的壁面同样具有良好的适应性。
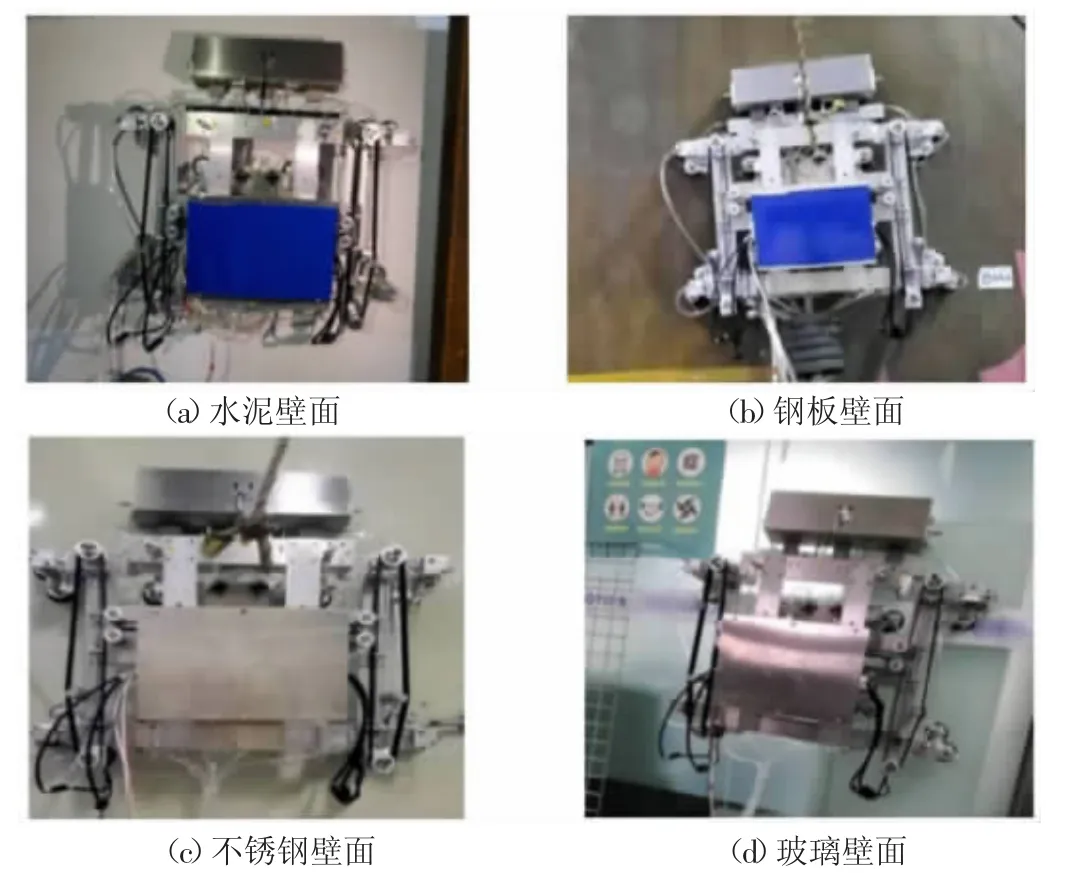
图4 清洁装置自动化控制机器人壁面适应性实验
本文设计的清洁装置自动化控制机器人需要具备能够越过最大高度为30mm 左右的障碍的能力,在进行实验环境设计时,选择一段截面为正方形的铝型材,测量其高度为30.64mm,并将其固定在玻璃壁面上,如图5 为爬壁机器人的越障实验。
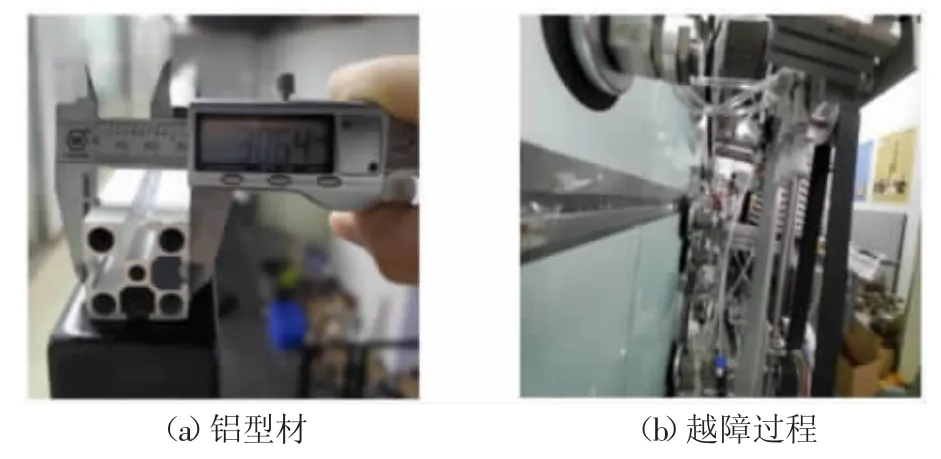
图5 爬壁机器人越障实验
根据越障实验可知,本文设计的爬壁机器人能够刚好顺利越过设置好的障碍,符合爬壁机器人的技术要求。
3.2.4 气象条件模拟实验
气象条件模拟:模拟了多种气象条件,包括:
高风速条件:增加了风速,模拟高楼层上的强风环境,以测试清洁装置在这种条件下的稳定性。风速范围从20m/s 到35m/s。
低温条件:降低温度,模拟极寒环境,以验证清洁装置在低温下的可靠性。温度范围从-10°C 到-30°C。
清洁装置启动:启动了清洁装置,并设置了不同的清洁程序,包括清洁速度和清洁效率的调整。清洁装置使用了清洁剂以模拟真实清洁过程。
运行监控:通过自动化控制系统对清洁装置的运行进行了持续监控。自动化控制系统负责监测并调整清洁装置的运行参数,以应对不同的气象条件。
3.3 实验结果与性能评估
下面是记录的一些实验数据:
风速和温度:在高风速条件下,风速范围从20m/s 到35m/s,温度范围在-10°C 到-30°C 之间。
清洁效率:清洁效率在不同实验中保持在85%以上,即使在极端气象条件下也没有明显下降。
清洁速度:清洁速度在各种气象条件下都在2-3 平方米/分钟之间,符合清洁的要求。
清洁剂消耗:记录了清洁剂的消耗情况,以评估清洁过程的经济性。
自动化控制系统响应时间:自动化控制系统能够在数秒内响应气象条件的变化,及时进行参数调整。
这些数据的详细分析和图表记录已被整理在实验报告中,以供进一步的性能评估和未来研究使用。这些结果表明,高空清洁装置和自动化控制系统在各种气象条件下表现出卓越的性能和可靠性。
总的来说,实验结果表明,高空清洁装置及其自动化控制系统在模拟的不同气象条件下都表现出出色的性能,这为其在实际应用中提供了可靠性和稳定性的保证。这项研究为清洁高层建筑幕墙提供了可行的解决方案,有望在未来的建筑维护中发挥重要作用。
4 结束语
本研究致力于解决高空清洁领域存在的挑战,旨在开发一种高效、安全、环保的高空清洁装置和自动化控制系统。通过机器视觉技术的应用,清洁装置具备了自主感知和智能路径规划的能力,从而显著提高了清洁效率。同时,污水回收系统的设计有助于减少污水排放,降低了对环境的影响。本研究的成果不仅在高层建筑清洁领域具有重要的实际应用意义,还为城市建筑清洁的可持续性发展提供了新的思路和方法。总结而言,通过技术创新和综合应用,研究在高空清洁装置和自动化控制系统的设计与实现方面取得了显著进展。这些成果为提高清洁效率、保障操作人员安全、改善城市环境卫生以及推动城市建筑清洁领域的可持续发展做出了重要贡献。未来,将继续努力,进一步优化和拓展这一技术体系,以适应不断发展的城市化趋势和清洁需求。
