智能时代的新玩伴:儿童与机器人的互动特征及其对儿童发展的影响*
2023-12-14邓士昌林子涵陆昱谦李象千
邓士昌 林子涵 陆昱谦 李象千
(1 上海对外经贸大学工商管理学院, 上海 201620) (2 上海七印信息科技有限公司, 上海 200080)(3 上海体育大学心理学院, 上海 200438)
1 引言
随着人工智能(Artificial Intelligence, AI)和机器人技术的飞速发展, 其对人类生活的影响日益深入。无论是实体还是虚拟的, 各种机器人都被赋予了先前难以想象的功能, 如自然语言交流、面孔和行为识别、社会和情感互动等。更值得注意的是, 它们仍在以创新且高速的方式蓬勃发展着。当前的生活环境是如此智能化, 即便对年龄最小的孩子来说, 这些技术也在深刻影响着他们学习、生活和玩耍的方式。今天的儿童将会成长为从小就浸润在智能科技中的一代人, 他们与机器人的关系将会与前几代人有着根本不同(Pashevich,2022)。于是这引发了一个重要问题:孩子们与机器人的交互模式是否和成年人一样呢?答案显然是否定的:儿童的身心发展尚未成熟, 他们在与机器人产品交互时表现出了独特的心理属性和认知特点(Langer et al., 2023)。因此, 专门研究儿童与机器人产品的互动特征显得尤为必要。
近年来, 越来越多的人机交互研究者开始关注儿童这一特殊的用户群体, 涌现了许多有关儿童与机器人互动(CRI, Child-Robots Interaction)的研究成果。本文旨在提供一个叙述性的总结框架,提出可以按照儿童对机器人的认识、儿童与机器人的互动, 以及这种互动对儿童发展的影响三个过程对CRI 领域的研究成果进行梳理。本文提出的过程模型符合机器人社会性存在理论(Robot Social Presence, Chen, Liu et al., 2023)。首先, 儿童需要观察和探索机器人, 建立对机器人的初步印象, 并由此产生对机器人的理解和态度。然后,儿童会和机器人展开交往、合作、教导等行为互动, 并与机器人发生亲昵、互助和依恋等情感交流,从而与机器人建立关系、发展信任。最后, 儿童与机器人的互动会塑造他们的认知、学习和社会性发展, 最终影响儿童的成长和同伴关系的建立。
按照Onnasch 和Roesler (2021)提倡的分类法,人机交互研究需要考虑人类特征、机器人特征和交互时的场景特征。本文将遵循这一建议, 在上述过程模型中考察儿童的特征(如年龄、性别、家庭和教育、文化背景等)、机器人的特性(如外观、拟人化程度、自主性程度等)以及两者交互时的场景特征(如监护人和同伴的存在、教育或娱乐用途等)在CRI 中的作用。这种分析将有助于理解儿童与机器人的互动过程和特征, 以及这种互动对儿童发展的影响。同时, 这也将有助于为如何优化面向儿童的机器人产品的设计和制造提供更有针对性的建议, 以更好地满足不同儿童的需求, 并帮助他们在与机器人的互动中实现更佳的学习和发展。
2 儿童对机器人的认识
描述儿童与新奇事物互动的数字游戏框架(Digital Play Framework, Bird & Edwards, 2015)和儿童参与行为框架(Children’s Engagement Behaviour Framework, Rennie & Howitt, 2020)都提出认识行为(Epistemic Behavior)是儿童初遇新事物的起点,即儿童首先要了解“这个东西是什么?” 结合这一框架, 本文将儿童对机器人这一新物件的认识分为三个过程, 即观察、探索和理解。观察是指儿童通过感官对机器人的形态、颜色、动作等外部特征进行感知, 以此建立对机器人的初步的印象。探索是指儿童结合自身兴趣和需求, 通过指导和操作, 开始了解机器人的工作原理、用途和行为模式等。相较于观察阶段, 探索阶段主要涉及摸索和实践的过程, 这个过程不仅包含了外部指导, 同时也受到儿童的内在动机和主动性的影响。最后, 理解阶段可以被视为一个更深层次、更内化的过程。在这个阶段, 儿童通过整合在前两个阶段收集的信息和经验, 形成对机器人的深入理解和全面认识。例如, 儿童能够预测机器人在特定情境下的行为, 或者儿童已经理解到机器人是如何完成任务的, 以及机器人的能力和局限在哪里。总的来说, 这种观察、探索和理解的过程不仅是儿童认识机器人的基础, 也是儿童与机器人开展进一步互动的前提。
上述儿童对机器人的认识过程可以在社会认知理论中找到依据, 该理论认为, 人们通过观察和互动来建立对周边事物的认知和理解(Gelman,2009)。儿童对机器人的认识过程就是通过观察机器人的外形和行为, 并探索机器人的特点和功能,从而逐渐形成对机器人的理解和态度。在这一过程中, 儿童不仅仅是被动地接受与机器人有关的知识, 而是积极主动地建构与机器人有关的概念(Charisi, Malinverni, et al., 2020)。因此, 研究儿童对机器人的认识过程, 是更好地了解儿童与机器人互动本质的第一步。
2.1 儿童对机器人的观察
儿童通常对新奇事物充满好奇心, 而机器人作为一种新兴科技, 往往能引起他们的兴趣。van Straten 等(2020)提出的儿童与机器人互动的S-O-R 框架认为, 机器人在外观上的视觉特征是孩子们在认识机器人过程中首先感知到的信息,因此往往给予儿童深刻的第一印象。机器人的视觉特征包含很多要素, 最先被儿童关注到的是拟人化特征(Tung, 2016)。拟人化特征指机器人与人类的相似程度。研究发现, 7~14 岁儿童对小型人型机器人NAO 的感知会随着机器人拟人化程度的变化而显著波动, 适当的拟人化特征能够提高儿童对机器人的接受程度(Barco et al., 2020)。但是, 相对于年幼的孩子, 9 岁以上的儿童表现出了“恐怖谷”效应(Uncanny Valley), 认为过于类人的机器人会让他们感到毛骨悚然(Brink et al.,2019)。可见, 对于年长儿童而言, 机器人的拟人化也不可太过逼真。除拟人化特征外, 儿童还会注意到机器人的颜色、形状和性别等整体外观。对7 岁儿童的研究结果表明, 孩子们更喜欢具有边缘圆润光滑、身体紧凑敦实的机器人的外观,同时儿童首选的机器人主色调是蓝色, 可能是因为这是一种与积极情绪状态、信任和稳定性相关的颜色(Oros et al., 2014)。并且, 不同年龄的孩子表现出了对机器人的性别偏好差异:3~8 岁的儿童在与拥有性别特征的机器人NAO 的互动中遵循性别隔离:他们更喜欢与同性机器人互动; 而年龄较大的儿童(9~12 岁)对机器人性别的偏好差异则不显著(Sandygulova & O’Hare, 2018)。
作为一种新颖的认知对象, 机器人并不是不声不响地任由儿童摆弄, 它们会传递社交线索。对人形机器人Robi 和可爱雏鸡形机器人Keepon进行实验的结果表明, 在第一次相遇和短期互动期间, 机器人最初的行为会影响儿童对其的看法(Haring et al., 2016)。研究发现, 机器人所展示的面部表情、语言音色和行为动作等社交线索极大地影响了机器人的社交能力和儿童对其的偏好(Tung, 2016)。首先, 在儿童对机器人的感知中,机器人对儿童进行面部表情反馈会使儿童表达出更加积极的探索热情, 并且使得儿童在与机器人的交互中体会到更多的乐趣(Cameron et al.,2018)。对9~14 岁儿童的研究发现, 当类人机器人Furhat 展示快乐表情时, 儿童更容易认为机器人是可信、喜欢和有能力的; 而当机器人展示愤怒表情时, 儿童则更容易认为机器人是不可信、不喜欢和没有能力的(Calvo-Barajas et al., 2020)。其次, 相较于使用面部互动的机器人, 儿童更喜欢与其进行身体互动的机器人。研究发现对5~6 岁的儿童而言, 与实体类人机器人NAO 的肢体和语言接触会改善他们的情绪, 并增进其对机器人的态度(Conti et al., 2019)。对7 岁儿童进行的实验发现, 外向型社交机器人Pepper 使用的积极语言表达和轻快短促、声调更高的音色, 会引起儿童更多的关注和喜爱(Jewell et al., 2019)。最后, 机器人的行为线索也会影响儿童对其的友好程度。例如, 在互动过程中, 人形机器人Alpha 能通过眼球运动(眼部灯的闪烁和色温变化)和身体动作吸引儿童(Dou et al., 2022)。
总结来看, 在儿童对机器人的观察中, 机器人的视觉特征会给儿童留下深刻的第一印象, 儿童更喜欢拟人化的机器人, 但对年长儿童来说,过度拟人化也会带来“恐怖谷”效应。同时, 机器人表现出的面部表情、语言音色和行为动作等社交线索能够影响吸引儿童的注意, 使得儿童对其产生兴趣和好感。
2.2 儿童对机器人的探索
在儿童观察了机器人的视觉特征和社交线索,并建立了对机器人的初步的印象后, 他们就会展开对机器人的进一步探索, 通过对机器人的摸索和实践来了解其功能和行为模式。首先, 这种探索通常从简单易行的任务开始。在研究中, 4~6 岁的儿童被引导与遥控社交机器人Tega 进行简单的对话, 如讲故事; 儿童发现如果机器人的故事水平与他们的语言能力相匹配, 他们就更容易与机器人建立关系, 而且更愿意模仿机器人的词汇和短语(Kory-Westlund & Breazeal, 2019a)。类似地,关于8~13 岁儿童与社交机器人Miko 之间初次互动的研究发现, 一些相对容易、互动性强的“开箱”任务(例如问答环节、赛跑或球类游戏等)可以帮助儿童更好地理解机器人的功能和特点, 并提高他们对机器人技术的认知和接受度(Lee et al.,2022)。在此过程中, 儿童在探索机器人时更喜欢基于自己的需求和兴趣, 而不是按照固定的时间表或任务流程进行。对6~11 岁儿童的研究发现,相对于桌面社交机器人Haru 的“介入”, 儿童更喜欢在与机器人协作解决的任务中自主选择是否需要机器人的帮助(Charisi, Gomez, et al., 2020)。可见,这种自愿互动方式可以更好地激发儿童的兴趣和主动性, 从而提高他们对机器人的探索欲望。
上述探索过程会受到外界情境的影响。其中,最重要的情景因素是成年人的引导, 因为对儿童,尤其是低龄儿童而言, 他们对机器人的初次探索几乎都是在成年人的陪伴下进行的。研究发现,成年人对机器人的介绍在很大程度上影响了儿童对其的探索行为:如果让成年人在机械臂式机器人与5~16 岁的儿童互动之前, 首先对机器人采取积极的介绍, 那么在经过成年人的积极介绍后, 儿童对机器人的帮助行为会显著增加。该研究采用“光环效应”来解释这种现象, 认为给儿童设置一种期望会让他们对与机器人互动时保有积极的体验和期待(Beran, Ramirez-Serrano, Kuzyk, Nugent et al., 2011)。并且, 3~7 岁的儿童在听取了成年人把社交机器人Tega 介绍为一种社交伙伴(而不是类人机械)的描述后, 他们会更频繁地注视机器人的脸部和眼睛, 而且会对机器人更加健谈(Kory-Westlund et al., 2016)。研究也发现在儿童和机器人初次接触时, 他们的交互模式受到媒体中出现的机器人形象和家长对机器人的描绘的影响:如果外界对机器人的描绘是积极的, 则这种对愉快互动期待会延续到儿童与机器人的实际交往中,反之, 儿童就会在互动开始时对机器人持谨慎态度(Brunick et al., 2016)。在调查儿童与Amazon Alexa,Google Home, Cozmo 等一系列商业社交机器人互动后, 研究发现3~10 岁的儿童需要机器人给予理解性的反馈, 这样机器人才会对儿童保持吸引力;而主持人和父母在帮助儿童重新进行措辞或提炼他们的问题时起到了关键作用, 使得儿童与机器人交流更加积极和顺利(Druga et al., 2017)。
总的来说, 在儿童对机器人的探索过程中,他们会通过与机器人进行简单的互动来了解其功能, 随后在自主的探索中进一步了解机器人的用途, 最后在成人的引导下, 他们会开始摸索机器人的行为, 从而深化对机器人的认识。因此, 为儿童提供适当的任务和探索方式, 并通过积极引导营造良好的交互氛围, 是促进儿童对机器人产生良性认识的重要途径。
2.3 儿童对机器人的理解
在观察和探索后, 儿童会逐渐形成对机器人的理解, 产生“机器人是什么?”的认识。总的来说,儿童对机器人的认识是模糊且态度友好的。研究发现, 儿童在3 岁时就对机器人产生了强烈的拟人化倾向:年幼的孩子通常不会将机器人视为运行计算机程序的机电设备, 而是将它们视为一种生命系统, 或者至少会保持机器人具有栩栩如生的特征的错觉(Belpaeme et al., 2013)。进一步研究发现, 在稍年长一些的儿童(7~10 岁)对机器人的认知中, 机器人被认为既不是有生命的也不是无生命的, 它们是儿童自身可能会与之形成社会关系的实体(van Straten et al., 2020)。关于5~7 岁儿童对机器人(相对于人类)的自由选择归因研究发现, 在道德中性的场景中, 儿童给予机器人和人类相似程度的自由选择归因, 相对地成年人更倾向于将自由选择归因给人类(Flanagan et al., 2021)。这些发现揭示了儿童对机器人的理解是不清晰的,并且对机器人的认识在不同的年龄和认知发展阶段会有所不同。
为什么儿童会对机器人持这种理解?元分析认为儿童在不同年龄阶段的认知能力差异显著,因此年龄是影响儿童对机器人理解的首要因素(Stower et al., 2021)。皮亚杰的认知发展阶段理论指出, 儿童的认知发展过程可以分为感知运动阶段、前运算阶段、具体运算阶段和形式运算阶段,在不同发展阶段中儿童的认知和行为有着质的不同(蒋柯, 李其维, 2020)。感知运动阶段和前运算阶段的儿童尚未获得守恒性、群体结构思维等认知技能, 因此更加年幼的儿童普遍持有“万物有灵论” (Animism), 他们会倾向于赋予无生命物体以生命和意识(Beran, Ramirez-Serrano, Kuzyk,Fior et al., 2011)。许多研究表明, 年幼的儿童很难区分机器人是否具有生命, 而年长的儿童则有较为清晰的认知, 并且这种认知在观察机器人运行和与机器人互动的过程中是逐渐加强的(Cameron et al., 2017; Okanda et al., 2021)。反映到儿童对机器人的理解中就会发现, 处于感知运动阶段和前运算阶段的儿童对机器人的认知是不充分的, 这会导致更年幼的儿童会更加接受机器人, 更加愿意与机器人进行互动, 并将其视为社会伙伴(Burdett et al., 2022)。
随着年龄的增长, 儿童的认知发展进入了具体运算阶段和形式运算阶段。在这两个阶段, 儿童对机器人理解开始呈现更复杂的特征, 他们不再将机器人简单地看作具有生命的实体, 而是开始理解机器人的工作原理和功能; 他们也开始认识到机器人的智能并非自然而生, 而是由人类设计和编程赋予的(Jung & Won, 2018)。同时, 年长儿童的社会性认知也影响了他们与机器人的互动方式, 他们期望机器人表现出更多的社会性行为, 如情感反应, 人性化的沟通方式等(Kahn et al., 2012;Kim et al., 2018)。此外, 这个阶段的儿童开始能够理解机器人的道德和伦理问题, 如机器人的权利,人类对机器人的责任等(Woo et al., 2021)。
对年长儿童而言, 性别差异开始逐渐影响儿童对机器人的理解。对8~14 岁儿童进行的实验研究测量了他们对不同拟人程度机器人图片的感知,发现儿童对人形机器人的认知和态度并没有明显的年龄差异, 但是男孩对机械化外观的机器人兴趣明显高于女孩, 而女孩则更加喜欢高度拟人化的机器人(Tung, 2011)。类似的测量研究发现:随着年龄成长, 8~11岁儿童对机器人的友好性感知出现了性别差异。女孩更喜欢具有可爱或舒缓特征的机器人, 而男孩更喜欢与战争有关的机器人(Cheng et al., 2017)。进一步的研究认为, 这可能是由于女孩在长期互动的友谊情景中对亲密度和联盟的评价要高于男孩, 因此女孩通常比男孩更加看重机器人的社会性(Kory-Westlund et al., 2018)。
综上所述, 年幼的儿童往往将机器人视为生命系统, 或将其赋予生命和意识, 这与其认知能力和认知发展阶段有关。随着年龄的增长, 儿童对机器人的理解逐渐清晰。年长的儿童更能区分机器人与有生命的实体的差异, 同时性别也开始影响儿童与机器人对机器人的理解和态度。
3 儿童与机器人的互动
在儿童接触并认知了新事物后, 他们接下来的行为通常会是与之互动、尝试探索和玩耍, 深入理解“我能用这个东西做什么?” (Bird &Edwards, 2015; Rennie & Howitt, 2020) 在人机交互领域, van Straten 等(2020)以及 Onnasch 和Roesler (2021)的研究框架都认为人机互动的过程可以从人们与机器人的交往和他们对机器人的反应来描述, 并且, 儿童与新事物的互动都可以视为一种游戏过程(Wynberg et al., 2022)。据此本文推测, 在互动阶段, 儿童首先会与机器人进行游戏般的社会交往, 然后对机器人产生伙伴般的情感和依恋。但值得注意的是, 儿童与机器人的关系并非总是融洽的, 儿童对机器人也会产生一些负面行为(Yamada et al., 2020)。
这一儿童与机器人的互动过程是符合具身认知理论的。具身认识是儿童认识世界的重要方式,虽然当今人工智能技术的发展改变了儿童与传统物品的交互形态, 但与主要通过符号系统和抽象思维来认识世界的成年人不同, 儿童在本能上仍然是通过亲身经历和感官体验来认识世界的(叶浩生 等, 2020; 陈巍 等, 2021)。当前的社交机器人功能强大, 能较好地拟态人类行为(张钺, 2022),因此当儿童与机器人进行社会性交往时, 他们往往将这种交往视为与现实世界中的人或物体的互动, 从而将机器人视为具有社会属性的实体; 进一步地, 这种互动过程使得儿童能够与机器人建立联系, 并在情感和认知层面上与之产生交流(Peter et al., 2021)。同时, 儿童试图通过身体和感官系统来理解和适应新技术的挑战, 在此过程中,儿童可能会受各种因素影响, 对机器人出现负面行为。接下来, 本文将从上述三个方面考察儿童与机器人的互动过程。
3.1 儿童与机器人的社会交往
如前所述, 儿童对机器人的认知不如成年人清晰, 年幼的儿童甚至无法区分机器人是否具有生命特征。但正是由于这种认知的模糊性, 儿童并不会像成年人一样对机器人产生诸如隐私、安全、人际关系等方面顾虑, 而是更多地出于单纯的好奇或享乐态度来接近机器人(Burdett et al.,2022)。由于孩子们对机器人的使用和存在持有更加开放的态度, 并且对机器人的接受度也更高,因此机器人在家庭中可以作为儿童的伴侣, 在游戏场景时通常也被儿童视为是自己的伙伴(de Jong et al., 2022; Michaelis & Mutlu, 2017)。许多研究发现, 儿童会在和机器人的互动中与之形成亲社会联系。例如, 5 岁的儿童在与机器人互动时关心机器人如何看待他们, 并更加乐于向互动性的机器人 Sota 做出分享行为(Okumura et al.,2023)。对5~16 岁儿童与臂式人脸机器人的互动研究发现, 儿童会帮助无法到达目标位置或者需要拾起掉落物品的机器人, 而且儿童能分辨哪些机器人需要帮助, 以及如何帮助这些机器人(Beran,Ramirez-Serrano, Kuzyk, Nugent et al., 2011)。对3~4 岁儿童帮助小型类人机器人NAO 的归因研究发现, 低龄儿童对机器人的同情程度取决于机器人寻求帮助的行为, 而不是机器人的拟人特征,也即无论儿童认为机器人有无生命, 他们都愿意帮助它们, 这可能与儿童天然的利他主义倾向有关(Martin, MacIntyre et al., 2020; Martin, Perry et al.,2020)。这种儿童与机器人形成亲社会联系的原因也揭示了设计面向儿童的社交机器人的一个重要问题:在儿童与机器人互动时, 机器人行为对儿童的影响是相当显著的, 儿童如果观察到机器人是强亲社会类型的, 那儿童自身也会表现出更多的亲社会行为(Peter et al., 2021; Tolksdorf et al., 2020)。
进一步地, 研究发现在儿童与机器人的互动中, 儿童会认为机器人是一个不错的朋友, 而不是玩具。例如, 与独自玩耍相比, 8 岁和12 岁的孩子们更喜欢和社交机器人iCat 一起玩, 同时, 孩子们与机器人玩耍时在非语言行为方面的表现力比单独玩耍时更强(Shahid et al., 2014)。有研究调查了10~12 岁儿童和父母对和家用社交机器人互动时的不同偏好, 发现孩子们除了与机器人进行学习和玩耍外, 还对和机器人进行深度社交更加感兴趣; 儿童认为机器人可以倾听和同情他们,因此更加愿意对机器人袒露心声, 这可能是由于儿童认为机器人能够提供中立、可信任的关系(Cagiltay et al., 2020)。研究也发现在社会交往中,7~10 岁的儿童很喜欢机器人NAO 的提问和机器人有关自己的喜好和恐惧等私人信息的自我披露,这使得儿童认为机器人拥有认识透视(cognitive perspective-taking)和换位思考的能力和同理心(van Straten et al., 2022a)。但是在此过程中, 增加儿童与机器人的互动频率和保持机器人的自主性非常重要。例如, 对9~12 岁儿童与社交机器人Furhat的虚拟版本的重复互动对其态度的影响研究发现,相对于首次互动, 儿童对虚拟机器人的能力信任和亲密感随着互动次数的增加而增加(Calvo-Barajas& Castellano, 2022)。同时, 对7~10 岁的儿童来说,如果让他们观察到机器人NAO 的行为是由远程操作员控制的, 则他们对机器人的自主性和拟人化感知会降低, 从而影响了儿童对机器人的的信任程度和社交意愿(van Straten et al., 2022b)。
总之, 由于儿童对机器人的认识不如成年人充分, 因此他们愿意与机器人进行深入的社会交往, 这使得机器人可以成为儿童的伙伴。但是, 儿童希望与之做朋友的机器人是熟悉、拟人且自主的, 所以, 设计面向儿童的社交机器人需要仔细考虑机器人的特征和行为。
3.2 儿童对机器人的情感和依恋
随着儿童与机器人交往的逐渐深入, 儿童有可能会对机器人这位社交伙伴产生更多的、更深层次的情感和依恋。第一, 儿童会对机器人表现出抚摸、拥抱等亲昵行为, 就像对待真实的宠物或人类一样。研究发现, 在7~9 岁的儿童与机器狗AIBO 交互的过程中, 儿童会对机器狗做出亲热的举动例如抚摸、抓挠、亲吻和拥抱, 他们认为AIBO 可以成为朋友; 而在生物狗作为对照组的实验中, 尽管有儿童认为机器人没有生物属性,但很多儿童仍然肯定AIBO 具有精神状态和社会性, 这表明儿童在知晓AIBO 是人工制品的认知并没有阻止他们从社会性的角度来看待机器狗(Kahn et al., 2013)。第二, 儿童会保护机器人, 研究发现当陌生成年人靠近小型人形机器人Keepon时, 3 岁左右的儿童会试图将它藏起来, 表现出对机器人的保护欲(Kozima et al., 2009)。同时, 儿童还会向机器人求教, 研究发现7 岁和12 岁的儿童和机器人的游戏和互动并不是简单的玩耍, 孩子们还会向这位“朋友”学习知识和技能, 这表明儿童对机器人有相当程度的情感认同(Constantinescu et al., 2022)。第三, 儿童会向机器人寻求情感交流和慰藉, 表现出对机器人的依恋。研究发现绝大多数10 岁左右的儿童(样本的90.2%)表示如果他们独自在家时有机器狗AIBO 的陪伴会感觉更好,但是成年人对此的态度却比较冷淡, 这表明儿童对机器伴侣有着特殊的情感依恋(Weiss et al.,2009)。同时, 4 岁左右的儿童会对机器人表现出类似于对待真实生物的情感反应, 如亲近、信任和依赖, 而且儿童还可能会与机器人分享故事和秘密等活动, 并将机器人视为自己的密友(Borenstein &Pearson, 2013)。第四, 儿童甚至还会“嫉妒”机器人与其他人的交往, 研究发现在对机器人的照顾游戏中, 儿童会发展出对机器人的依恋; 然而, 当儿童意识到机器人对其他孩子也做出与对自己相同的反应时, 儿童会感到不满, 因为他意识了到他们之间的关系并不是独特的(Law et al., 2022)。
在儿童与机器人发展情感和依恋关系时, 他们表现出了文化背景差异。有研究让荷兰和巴基斯坦的8~12 岁儿童与社交机器人iCat 进行纸牌游戏, 结果发现巴基斯坦儿童更加热情, 拥抱和触摸机器人的次数要多于荷兰的儿童; 同时, 巴基斯坦儿童对机器人抱有更高的期望, 并且表示出更多积极的暗示。这其中固然有巴基斯坦儿童平时与机器人接触相对较少、他们对于新奇的事物相对积极的原因有关; 然而, 研究者也认为文化因素的影响同样重要:荷兰儿童有着明显的个人主义倾向, 但是巴基斯坦儿童更加集体主义,他们更在意团队协作和群体目标, 因此他们在集体任务中对机器人的友好互动更多(Shahid et al.,2014)。此外, 在调查用于糖尿病自我管理的社交机器人时发现, 与8~11 岁的荷兰儿童相比, 10~14岁意大利儿童对待机器人持有更加开放的态度,他们与机器人互动的文本中包含更多情感表达和更有表现力的词汇, 在身体行为上也更加接近和更频繁地触摸机器人; 由于两组儿童年龄接近,因此研究者认为这可能是由于意大利文化更鼓励在社交时表现外向和热情(Neerincx et al., 2016)。可见, 儿童对机器人的情感互动受到了他们所成长的文化环境的塑造。
综上, 由于儿童对机器人持模糊认知和开放态度, 儿童会在与机器人互动时对它们表现出亲昵行为、保护欲望、求教倾向乃至情感交流和依恋。这一过程不仅受到儿童的年龄、机器人的特征和互动环境的影响, 儿童自身所处的文化环境也是值得考虑的重要因素。
3.3 儿童对机器人的负面行为
值得注意的是, 儿童对待机器人并不总是如同对待亲密朋友一般, 研究证据表明, 儿童在与机器人互动时也会出现一些对机器人的负面行为。有研究在日本大阪的一个商场布置了传感器,发现在父母不在身边且周围行人较少时, 5~9 岁的儿童会更长时间地待在人形机器人周围。如果此时有更多的儿童在场时, 他们就更容易对机器人进行虐待(abuse), 例如阻碍机器人的移动, 甚至辱骂、打击、踢和/或推倒机器人。即使机器人要求他们停止这种不良行为, 他们通常也会忽略这个请求, 直到他们感到无聊或者他们的父母制止了他们(Brščić et al., 2015)。对5~9 岁儿童对该类人形机器人施加虐待的归因研究发现, 大多数儿童参与虐待是因为他们好奇机器人对此行为的反应, 他们其实并没有伤害机器人的意图; 但是,也有部分儿童在认为机器人是一个类人实体的情况下, 仍会对机器人采取虐待。这可能是由于这些儿童缺乏同理心, 他们认为机器人能够感知他们的虐待行为, 但他们享受虐待机器人的过程,正如有些孩子会虐待小动物一样(Nomura et al.,2016)。进一步的研究也发现其他在场的儿童可能是目标儿童对机器人采取虐待的事先刺激因素,并且当其他儿童参与该行为时, 目标儿童对机器人的虐待会重复发生并逐渐升级。研究者认为类似于对人类的欺凌, 儿童对机器人的虐待行为存在着相互模仿和相互升级, 这可能是由寻求同伴称赞的欲望引起的(Yamada et al., 2020)。可见, 儿童对机器人的负面行为会受到儿童的同伴压力和从众心理的影响。
研究者认为, 在没有外界干预的状态下, 儿童出现对机器人的负面行为是“自然”的。因为儿童经常与机器人玩耍, 并寻求安慰和陪伴, 而机器人往往被设计为按照儿童的意愿行事, 没有自己的“脾气”, 其结果就是, 儿童不需要考虑机器人的社交兴趣和需求, 这种情况可能会导致儿童与机器人形成主仆关系。这种关系可能会导致不利的儿童与机器人关系的发展结果, 例如儿童可能会对机器人施加暴力或虐待, 甚至儿童可能会将机器人视为自己的奴隶, 并期望它们无条件地服从自己的命令。长此以往, 这种儿童与机器人的主仆关系可能会阻碍儿童与其他人类和动物建立健康的社交关系, 并导致孤独和隔离, 而且儿童可能会过度依赖机器人, 并失去与现实世界互动的能力(Kahn et al., 2013)。因此, 要干预儿童对机器人的负面行为, 一方面可以让机器人“反抗”,使得儿童意识到机器人并不是被动地服从自己,它们也有自己的意愿。有研究开发了一个统计模型来预测儿童虐待类人机器人的可能性, 并使机器人在虐待发生之前逃脱; 场地实证证明了这一策略可以有效降低儿童对机器人虐待事件的发生率(Brščić et al., 2015)。另一方面, 家长和其他成年人应该及时制止儿童对机器人的负面行为, 使得儿童意识到辱骂和推搡机器人并不是值得称赞的行为(Sanoubari et al., 2021)。
总体来看, 由于儿童尚未发展出成熟的认知模式和判断能力, 他们有可能会将顺从的机器人视作为自己的仆人。在同伴之间存在相互模仿时,儿童很容易被周边环境卷入, 从而采取不良的方式来对待机器人。这时候, 就需要让机器人被设计得会回应儿童的负面行为, 同时家长也要及时干预, 使得儿童对机器人能够保持友善。
4 与机器人互动对儿童发展的影响
与周围环境的互动是儿童成长过程中的关键影响因素, 机器人作为一种新兴技术, 已经融入儿童的成长环境之中, 并成为了儿童学习和生活中的一个重要组成部分(毛忆晨 等, 2022)。如前所述, 儿童常常会把人类特征赋予各种物体, 在这种情况下, 社交机器人在儿童生活中充当着类似于想象中的伙伴和拟人化物体的角色。然而,与传统的玩具或玩偶相比, 机器人能够更好地模拟伙伴这一角色, 更充分地与儿童“互动”。研究表明, 儿童会将机器人当作学识渊博且信息丰富的对话者和信息提供者, 并且儿童倾向于向具有敏感反应能力的机器人进行学习, 而且机器人还会根据儿童的行为和反应作出调整(Breazeal et al.,2016)。可见, 通过提供丰富的互动和反馈, 机器人的各种表现会影响到儿童的发展。接下来, 本文将考察与机器人互动对儿童的认知、学习能力和社会性发展的影响。
上述三个方面的影响是一体三面的。认知发展理论指出儿童通过与环境的互动不断调整和建立对世界的认知, 这个过程影响着他们的学习能力的发展; 而社会文化理论则强调了学习是一个社会性的过程, 通过与他人的互动和反馈, 儿童能够习得更高的心理功能(王光荣, 2014)。如前段所述, 机器人能够为儿童提供有趣的、充满反馈的社会性互动。在与机器人的互动过程中, 儿童能够模拟现实世界的场景, 锻炼问题解决和决策能力。同时, 机器人可以通过适时的反馈和引导,帮助儿童更好地探索世界、学习新的知识和技能。此外, 机器人还可以模拟人际互动, 让儿童在相对安全的环境中练习沟通、协作和解决问题的能力, 从而发展与人际关系相关的能力。因此在与机器人的互动过程中, 儿童能够更好地在认知能力、学习能力和社会性发展方面取得进步, 这种发展过程是相互促进、相互依赖的, 显示了儿童发展的内在逻辑。
4.1 对儿童认知和元认知发展的影响
如前所述, 机器人作为一种有趣且高度交互的新奇事物, 可以提高儿童探索它们的兴趣和参与度, 从而有助于提高儿童加工、储存和提取信息的能力, 也即促进儿童的认知发展(Kálózi-Szabó et al., 2022)。首先, 机器人可以用有趣和吸引人的方式来呈现信息, 这有助于提高儿童的注意力。有研究设计了 5 个任务模块, 并观察了6~12 岁儿童与机器人NAO 在这些任务中的交互持续时间, 结果发现大多数孩子对机器人表现出了积极的参与度, 并且他们在完成第二至第四模块任务中的时间显著减少, 这表明儿童的注意力有所改善(Ismail et al., 2021)。其次, 机器人可以耐心地反复提供学习材料, 以增强儿童的记忆力。研究表明, 机器人可以多次重复特定的词语或概念, 帮助小学和初中的孩子将这些信息编码到他们的长期记忆中; 由于机器人可以在任何时间提供这些信息, 所以它们也可以帮助孩子们在合适的时候进行复习, 从而进一步加强儿童的记忆能力(Chu et al., 2022)。最后, 机器人可以提供一种创新的学习环境, 让孩子们在探索和尝试过程中提高问题解决能力。通过与社交机器人共同完成一项任务, 儿童们需要思考、规划并执行方案; 这种学习方式可以提高孩子们的逻辑思维水平, 同时也能够提高了他们处理信息、解决问题的能力(Anwar et al., 2019; Neumann, 2020)。
除了促进儿童的认知能力, 机器人也能提升儿童对自己思维过程的认识和调节能力, 也即促进儿童的元认知发展。有研究开发了一个名为KindSAR 的社交机器人项目用于辅助幼儿园的几何教学, 该机器人可以监测和记录儿童在游戏任务中的表现, 并向教育工作者和儿童提供详细反馈。孩子们首先与机器人共同完成任务, 并且要在一周后向尚未完成任务的孩子解释这项任务的目标以及自己是如何完成的。量表测量结果表明,KindSAR 的反馈可以帮助儿童了解自己的表现,从而提高他们在元认知知识、元认知调节以及情绪和动机调节上的测验成绩(Keren & Fridin,2014)。相关的回顾性研究也表明机器人可以通过提供具体和以学习者为中心的学习环境来促进元认知发展, 在与机器人的活动中, 儿童需要使用元认知策略来规划、监控和评估他们的学习过程,以便成功地引导机器人完成任务, 由此, 儿童的自我监控和评估等元认知技能得到了发展(Özkan& Toz, 2022)。
上述儿童认知与元认知能力的提升是在与机器人交互的关系构建中形成的。儿童往往会学习和模仿机器人的行为(Itakura et al., 2008), 儿童在执行任务之前与机器人接触的次数越多, 他们就越有可能重复机器人的动作(Sommer et al.,2021)。并且儿童的模仿不会区分机器人的行为是否能达到目的, 即使儿童知道有更有效的策略来达成目的, 他们仍愿意采取与因果无关的行动(Schleihauf et al., 2021)。因此与表达成长心态的同伴式机器人互动可以对儿童的认知模式产生积极影响, 机器人可以通过展示积极的心态和行为来激发儿童的探索兴趣和动力, 并帮助他们形成更积极、更有信心的思维模式; 同时, 机器人还可以提供个性化的反馈和支持, 帮助儿童克服挑战并取得成功, 从而进一步巩固他们的成长和发展心态(Park et al., 2017)。此外, 机器人还可以提供一种安全而无压力的互动环境, 使儿童能够在没有任何风险的情况下尝试新事物, 这种无压力的环境有助于儿童保持积极性和好奇心, 并且有助于他们更快地发展各种认知技能(Ali et al., 2019)。
综上, 由于机器人能提供一种有趣、积极、宽松且充满反馈的互动情景, 这使得儿童愿意深入和长时间地专注于探索机器人, 并与机器人共同完成任务, 这些与机器人的互动可以有效促进儿童认知和元认知的发展。
4.2 对儿童学习能力发展的影响
对儿童而言, 学习是他们成长中的重要内容。儿童的学习能力是指他们掌握基本的知识和学习技能的能力, 如语言、数学和基本概念理解等, 儿童通过各个学科的具体学习来发展掌握基本知识和学习技能的能力, 这些学习能力反过来又成为了孩子们成功掌握学科知识、塑造思维模式的基础(Sommer et al., 2021)。研究表明, 与机器人互动能够增强儿童的学习能力。首先在语言能力上, 让5 岁的儿童参与认识和简单构造机器人的课程后, 孩子们的识字能力得到了提高, 并且在与机器人互动时, 孩子们扩展了他们的术语,并使用更复杂的句子来解释机器人的行为或解释他们自己的想法(McDonald & Howell, 2012)。进一步研究也发现与传统的数字化教学手段(例如平板电脑)相比, 与小型类人机器人NAO 互动的孩子们更愿意参与讲故事的任务, 而且语言学习收益会随着时间的推移而增加(Konijn et al.,2022)。其次在数学能力上, 研究证实了机器人作为教学工具对儿童的有效性, 特别是在数学教育方面, 与机器人进行互动可以重新激发儿童在高需求认知任务中的兴趣, 从而提高算术测试的成绩(Brown & Howard, 2015)。有研究也设计了一个机器人导师, 在对7~9 岁儿童的实验中, 它可以针对儿童在解决基本加减法问题时所犯的错误进行反馈, 该机器人不仅可以自动检测错误, 还可以识别错误类型并解释如何避免这些错误。由于机器人导师比人类反应更敏捷、介入更及时, 因此孩子们的算术能力得到了有效提升(Hindriks &Liebens, 2019)。最后在综合学科能力上, 研究者设计了“儿童机器人剧场”, 让类人机器人NAO、Robosapien 等加入传统的STEM 教学, 参与实验的儿童为5~11 岁; 在儿童设计的剧本故事里, 机器人按照角色参与表演, 儿童对于学习如何编程和制造机器人的兴趣显著提高, 并且可以更好地理解新技术的使用(Barnes et al., 2020)。可见, 引入与机器人互动的教学模式为儿童提早接触新技术如编程、机器控制和其他工程概念原理提供了良好的平台, 从而有利于儿童科学素养的提高。
在培养儿童学习能力的过程中, 机器人不仅可以作为教师, 也可以作为学生。有研究利用教学中的门生效应(protege effect), 让儿童扮演教师向人形机器人NAO 传授知识和技能, 而机器人作为学生与儿童进行对话。这种过程需要儿童对所学内容进行深入的解释, 并且需要他们在教学过程中不断调整自己的表达方式, 以确保机器人能够理解。在向机器人传授知识后, 儿童得到了机器人的认可和反馈, 这种教学经验可以增强儿童对所学内容的深入思考和记忆, 并提高他们的自信心和任务承诺(Jamet et al., 2018)。相关理论研究归纳了机器人在培养儿童学习能力上的4 个途径:(1)通过编写程序来控制机器人的行为, 儿童可以发展计算思维和逻辑思维能力, 并在实践中学习创造性解决问题的能力; (2)通过与机器人互动,儿童可以在实践中学习如何应对不同的情境和挑战, 从而培养创造性解决问题的能力; (3)机器人可以提供一个具有挑战性和激励性的环境, 鼓励学生尝试新的想法和方法, 并促进他们的创造力发展; (4)机器人活动还可以促进学生的合作和沟通技巧, 这些技能也是创造性问题解决所必需的。在实践中, 这些方面共同作用, 为学生提供了一个培养学习能力的良好环境(Gubenko et al., 2021)。
总之, 由于机器人有着高度的灵活性, 它们不仅能陪伴儿童学习、及时反馈儿童在解决问题中的错误, 而且还能反过来作为学生来学习儿童对知识的教学, 从而促进儿童对知识的深入理解。可见, 机器人作为一种新的教育工具, 为促进儿童学习能力的发展提供了多种可能性。
4.3 对儿童社会性发展的影响
儿童的社会性发展是指儿童在成长过程中逐渐学会如何与他人建立关系、相互理解和合作的能力。如前所述, 儿童在与机器人互动过程中会收获积极的反馈, 两者之间会构建不同以往的亲密关系。积极心理学认为, 内在层面的积极体验和情绪会导致行为层面的耐心和宽容(翟贤亮, 葛鲁嘉, 2017), 因此儿童与机器人的良性互动有可能会促进他们的社会性发展。从现有研究成果来看, 第一, 机器人朋友可以通过与儿童的游戏性实践来促进他们的社交意愿和共情能力的发展。研究发现4 岁左右的儿童与机器人之间的这种亲密联系可以促进儿童的社交技能和共情能力发展, 并有助于缓解儿童的孤独和焦虑等问题(Borenstein &Pearson, 2013)。相关研究也指出小型人形机器人Zeno 可以提供更多的可预测性和清晰的友好信号,从而使儿童更容易将机器人视为朋友, 并在与机器人互动中发展他们的社交意愿和想象能力(Elder,2017)。第二, 机器人朋友可以帮助儿童学习更多的社交技能, 并促进他们与真正的人类朋友建立联系和交往。研究发现对6~12 岁的儿童来说, 与家用社交机器人进行社交游戏可以帮助儿童发展社交技能, 如眼神接触、面部表情、语言沟通等,而且社交机器人还能根据儿童的兴趣和水平调整交互游戏难度, 以保持他们的参与度(Scassellati et al., 2018)。进一步研究也发现由于机器人脚本不允许儿童加快对话节奏, 这将促使小学儿童在交往中保持节奏, 学会如何耐心地倾听他人(Smakman et al., 2022)。第三, 机器人朋友还可以提供情感支持, 帮助儿童更好地理解和应对复杂的社会情境。研究发现机器人教育课程对12~16岁儿童的团队合作、社交技能有显著的积极影响,社交机器人可以通过激发儿童的好奇心来促进儿童的学习和参与, 可以与儿童进行对话鼓励他们表达自己的想法和感受, 以及与儿童一起玩游戏帮助他们学习合作和分享(Kandlhofer & Steinbauer,2016)。这些研究内容表明, 与社交机器人进行积极互动可以对儿童的社会性发展产生积极影响。
然而不得不指出, 机器人与儿童之间的关系更多是一种对友谊的模拟(Nyholm, 2020), 社交机器人仅仅是“模仿”人类的社会情感反应和行为,这种基于脚本或特定程序的反馈并不能阐释出朋友间的真正善意或感情(Matthias, 2015)。这一现实表明虽然机器人能够提供一定程度上的陪伴和互动, 但它们与真正的朋友之间的关系仍然存在差距, 因此, 儿童与机器人之间的情感纽带就可能会损害儿童的社会性发展(Smakman et al.,2021)。首先, 机器人的有求必应和千依百顺可能使得儿童更喜欢与机器人互动, 而不是与人类朋友进行互动(Sharkey, 2016)。现有研究表明, 由于机器人会主动反馈儿童的操作指令, 因此在人工智能环境下成长起来的儿童在人际关系处理上遇到的困难会更少, 所以与机器人的持续互动就可能会抑制儿童与他人之间构建友谊关系(Arnd-Caddigan, 2015)。同时, 与人类朋友进行互动不同,儿童从机器人身上寻求安慰与陪伴, 但不需要“适应”机器人的社会性兴趣爱好与需求, 这呈现出了一种社交间的不平等的关系, 因此当儿童成长之后将其带入到与他人相处的情境之中, 就会衍生一系列的社交问题(Kahn et al., 2013; Sharkey& Sharkey, 2021)。前述的儿童对机器人的负面行为就是一个研究例子, 由于机器人不会反对或回应虐待行为, 因此可能会激励儿童在它们身上尝试残忍的实验, 这会导致患有恶习的儿童对这些负面行为的脱敏或习惯(Constantinescu et al., 2022)。
可见, 社交机器人一方面可以促进儿童的社交意愿和共情能力的发展、帮助儿童学习更多的社交技能, 并且提供情感支持以协助儿童更好地理解和应对复杂的社交情境, 这些都有助于儿童的社会性发展。但是另一方面, 由于机器人朋友无法像真正的人类朋友一样为儿童提供适当的诤言和反馈, 因此儿童与机器人之间的社交是不平等的, 这使得机器人朋友可能会扭曲儿童的社交观。
5 总结和展望
本文将儿童与机器人的互动特征及互动结果整理如图1。接下来, 本文将回顾儿童与机器人互动这一领域的典型研究方法, 以及当前研究成果对设计面向儿童的机器人产品的启示。
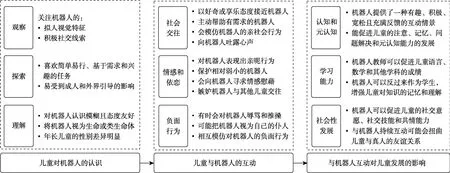
图1 儿童与机器人的互动特征及互动结果
5.1 典型研究方法总结
在儿童和机器人互动这一研究领域, 现有的实证研究可以分为描述性的和实验性的两类。其中描述性的研究往往不会对儿童与机器人的互动过程进行干预, 研究者主要是通过观察和访谈的方式来收集数据。例如观察和记录儿童对机器人形象的看法和反应(Cheng et al., 2017), 进行访谈以了解儿童对机器人的相处感受(Kahn et al.,2004), 或者采用观察和访谈相结合的方式先观察儿童对机器人的行为, 然后访谈儿童以分析刚才行为的原因(Nomura et al., 2016)。在这类描述性的研究中, 对互动过程进行视频录制后, 再进行编码评分等也是常用的方法(Schadenberg et al.,2020)。这些描述性的研究是非实验性的, 往往缺乏对变量的控制以及严格的环境要求, 因此开放式记录得到的结果可能会受到现场环境中其他因素的干扰, 例如家长和研究人员经常出现在这些研究现场, 儿童对机器人的看法和行为会受到成年人在场的影响(Beran, Ramirez-Serrano, Kuzyk,Nugent et al., 2011; Michaelis & Mutlu, 2017)
相对而言, 实验性的研究更为多见。研究者们更倾向于通过实验设计以了解儿童与机器人互动中的心理或行为之间的因果关系, 为此研究者们会对相关变量进行控制、进行随机分组和实验组—对照组比较, 这种以因果为中心的研究设计能提供更加系统性和严格的评估(Jung & Won,2018)。由于儿童与机器人的互动过程相对复杂,因此实验性研究中的研究者们往往采用混合方法来评估儿童与机器人的互动细节, 例如Shahid 等(2014)的研究中会要求儿童使用问卷进行自我报告, 同时还利用机器人传感器获得的数据进行客观测量, 以及对互动过程进行录制以及手动注释等多种形式来了解儿童与机器人互动的过程。Cameron 等(2017)通过开放式问题、访谈和李克特量表评分等了解儿童对机器人的反应以及主题分析来对内容进行分类整合。但是这些对数据的定量分析不能全面地评估儿童对机器人的认识过程和理解程度, 因此在实验研究中, 研究者也会在事后会对幼儿进行访谈, 以获得儿童对机器人的看法、感受等主观描述以丰富实验内容(Haring et al., 2016)。总的来看, 当前实验性的研究多为横截面设计, 仅考虑某一时间点下儿童与机器人的交互状况, 对儿童长期与机器人交互的纵向研究仍然较为少见。并且实验室下进行的研究可能受到实验环境以及研究人员的干预影响, 因此无法准确反应儿童在日常生活中的行为, 也即生态效度存疑。
针对现有存在问题, 研究者们正在努力做出改进。例如由于担心儿童对问卷内容误解或产生偏差, Tung (2011)会对儿童进行详细的说明和指导, 并且会在旁监督协助问卷的完成, 问卷中也会加入适合儿童年龄的语言和表达方式以确保儿童能够准确理解问题。Kory-Westlund 等(2018)建议可以通过4 个方面来满足儿童与机器人之间长期关系测量的需求, 即 (1)旨在测量儿童对机器人的情感投入程度的容他人于自我任务(Inclusion of Other in Self Task), 这要求儿童从一组图片中选择一个最能代表他们与机器人之间关系的图片;(2)旨在了解儿童与机器人之间的互动和关系的社交关系访谈(Social-Relational Interview), 内容包括儿童如何看待机器人、如何与机器人交流以及他们是否认为机器人是朋友; (3)旨在了解儿童对于他们与机器人之间关系的理解和表达能力的叙述性描述(Narrative Description), 其要求儿童讲述一个故事, 其中包含他们与机器人之间的互动和关系; (4)旨在了解儿童是否愿意向机器人透露自己的个人信息和信任程度的自我披露任务(Self-Disclosure Task), 即让机器人请儿童回答“你最喜欢和谁玩?”或“你最喜欢做什么?”等私人问题。这些方法可以帮助研究人员更好地了解年幼儿童与机器人之间的情感联系、信任程度和友谊质量等方面的变化, 以及为未来的研究提供比较基准。Kory-Westlund 和Breazeal (2019b)则指出基于图片的量表和行为指标更容易被儿童所理解, 因此他们提出使用图片分类任务(Picture Sorting Task)与社会接受问卷(Social Acceptance Questionnaire)来评估儿童对机器人的接受度以及相关的看法。这些方法能够更好地捕捉儿童在多次接触机器人过程中的感知和关系的变化, 是一种有效评估儿童与机器人长期互动的方法。
5.2 设计面向儿童的机器人产品时应注意的要素
今天的儿童是未来人类世界的主人, 所以了解儿童与机器人的互动过程及其特点, 是按照正确的方向设计机器人以满足孩子们对它的期望和需求的必要前提(Fortunati et al., 2015; 邓士昌 等,2022)。经典研究认为产品的用户体验可以分为三个阶段, 即在本能层面(Visceral Level)产生对产品的第一印象, 在行为层面(Behavioral Level)深入了解和使用产品以满足自身需求, 并在反思层面(Reflective level)思考产品内涵并依据与其相处的经验来规划未来行动(Norman, 2004)。从这三个层面出发, 本文总结了设计面向儿童的机器人产品时应注意的要素:
首先在本能层面, 由于儿童通常会将机器人视为新奇的事物, 并赋予其生命特征, 并且儿童对机器人的第一印象也往往受到机器人外观特质的影响。因此, 机器人的外观设计应引起儿童的好奇心和亲近感, 并处于儿童可接受的拟人化阈值之内。从现有研究成果来看, 色彩鲜艳、形状可爱的外观, 并且搭配柔软舒适材质的机器人, 更加能够吸引儿童的注意力并激发他们的想象力。
其次在行为层面, 儿童是活跃的参与者, 更愿意与机器人进行互动。与成人主要通过观察和询问来了解机器人不同, 儿童更多是通过与机器人不断互动来对其进一步了解的(Weiss et al.,2009)。研究表明, 由于儿童的身心都还处于发展之中, 所以儿童会倾向于向具有丰富信息内容且反应敏捷的机器人进行学习(Breazeal et al.,2016)。因此, 面向儿童的机器人的交互设计应简单明了, 易于理解和操作, 并且快速响应和流畅的动作可以增强儿童的参与感和乐趣(de Haas et al.,2016)。并且, 机器人还应根据儿童的需求和能力提供个性化的互动体验(Park et al., 2019), 从而促进他们的探索和成长。
最后在反思层面, 儿童在与机器人的互动中容易产生情感依恋, 并据此与机器人产生更深一步的交流。当前已有研究注意到了机器人与儿童之间社会性关系的形成, 所以机器人在与孩子礼貌地交流时, 必须能够表达友好态度, 尊重意见,并保持注意力(Uluer et al., 2021)。因此, 面向儿童的机器人设计应注重情感联系的建立, 通过展现友善、关怀的特质, 使得机器人成为儿童的伙伴和朋友。同时, 机器人应提供丰富的信息和有趣的学习体验, 以满足儿童的好奇心和求知欲(Toh et al., 2016)。这样的设计将激发儿童的情感参与和回忆, 促进他们的成长和发展。
综上所述, 设计与儿童交互的机器人需要考虑儿童在本能、行为和反思层面上的特点。通过吸引人的外观设计、简单易用的交互和情感联系的建立, 可以为儿童打造出积极、有趣和有益的机器人体验。这样的机器人将成为儿童的陪伴和学习伙伴,激发他们的好奇心、创造力和学习兴趣。
5.3 未来研究展望
目前儿童与机器人互动的研究中尚存在一些问题, 未来的研究需要从三个方面进一步探索。第一, 研究设计的扩展。在研究过程中, 能够发现年龄是影响儿童对机器人感知的一项重要因素。但在很多研究中, 不同年龄的儿童与机器人的交互差异是在探究儿童对机器人态度或偏好的过程中发现的, 而不是对参与被试的年龄进行严格划分后进行实验的结果。并且, 当前针对儿童的研究很多都是单次横断调查的结果, 儿童对机器人的认知很可能是因为新奇感导致的, 因此需要进行长期的互动研究。但由于儿童的特殊性, 在长期研究中很难找到足够多的儿童持续参与实验(Kory-Westlund & Breazeal, 2019b)。同时, 当前的儿童与机器人的交互研究所选取的儿童可能只局限在一个地区, 且多是西方国家, 这使得儿童与机器人的交互的跨文化研究相当少见。本文建议, 未来应当针对儿童个体特征进行更加细致的研究设计, 同时努力尝试纵向追踪研究和跨文化比较研究, 以期获得更加可靠且丰富的研究成果。
第二, 研究方法的改进。在研究儿童对机器人的看法与认知时, 采用传统的问卷或访谈方式并不能完全了解儿童的想法。对于一种问题, 儿童也许有很多原因来解释, 但受限于自身的逻辑发展水平, 儿童可能只能完整地表达出其中的某一方面而非全貌。并且目前很多针对年幼儿童的评估方法仍是有限或不准确的, 很多书面评估方法(例如李克特量表)对于儿童来说理解比较困难,年幼儿童可能因为注意力不集中或无法完全理解题目而造成调查无效(Kory-Westlund & Breazeal,2019b; Nomura et al., 2016)。尽管有研究者提出使用图片量表和其他行为观察来解决该类问题, 但是也应该考虑到对儿童展示机器人照片和展示电影、动画或其他材料得到的结果可能会有所有不同。将话题延伸到接触机器人实体后, 得到的感知结果又会有所差异(Burdett et al., 2022)。因此,未来有必要制定更有效的、符合儿童认知特点的评估方法来评估儿童与机器人的交互中的儿童反应, 以期得到更加准确的结果。
第三, 研究内容的深入。儿童与机器人的互动并不是孤立的, 这就提醒研究者应当置身于一种特定的情境中去考察儿童与机器人的交互的相关问题, 例如在家庭关系、同伴关系中, 儿童可能会对机器人表现出不一样的反应。有研究发现,儿童对机器人的社会存在感知受到互动环境的影响, 使用同一机器人探索不同情境中社会存在的变化有助于深入了解儿童与机器人之间的关系(Chen, Yeh et al., 2023)。同时, 当前研究普遍关注儿童在商场大厅和教室等公共场合中的儿童与机器人的互动模式(Brščić et al., 2015), 但在无人目击的私密场合中, 儿童与机器人又会呈现怎样的互动模式, 这都是值得考察的问题。进一步地, 现有研究多停留在观察儿童在人机互动过程中表现出的各种行为, 但对这些行为出现的原因尚缺乏深入的探讨。值得注意的是, 伴随着儿童对机器人的行为互动, 又会引发出更多的伦理问题。未来的研究与实践应该更综合地考虑儿童和机器人的特点, 更合理地设计儿童与机器人的互动模式,为儿童提供更多帮助。
