大型高地隙自走式喷雾机转向系统结构设计及优化
2023-12-11李伟杨帆毛恩荣邵明玺李志香杜岳峰
李伟 杨帆 毛恩荣 邵明玺 李志香 杜岳峰

摘要:轉向系统作为大型高地隙自走式喷雾机的重要组成部分,其性能的优劣直接影响喷雾机的操纵稳定性、行驶平顺性和施药效率,合理的转向传动机构可以有效减小车辆转向过程中的侧滑及轮胎磨损。针对大型高地隙自走式喷雾机结构特点和作业环境,结合转向系统设计要求,在转向定位参数设计计算的基础上,设计一种适用于大型高地隙自走式喷雾机转向传动机构,建立其准确的三维模型,并利用ADAMS/Car进行平行轮跳试验,最后利用ADAMS/Insight对其结果进行转向定位参数优化。仿真结果表明:优化后的转向系统在轮跳幅值为±50mm的仿真试验中,前轮前束变化幅度减小72%,前轮外倾角变化幅度降低58.4%,立轴内倾角变化幅度减小16.9%,变化幅度显著减小且更加平缓,提高整车的操纵稳定性,减少转向过程中的轮胎磨损,可更好地满足高地隙自走式喷雾机的转向作业需求。基于自主研制的3WPG-3000型高地隙自走式喷雾机,搭建转向系统实车试验平台,通过GPS设备,对不同转向模式下喷雾机的同心圆转向轨迹进行测定,试验结果表明,两轮转向模式下转向半径为6.85m,四轮转向模式下转向半径为5.12m,同时,所设计的转向系统在不同转向模式下均可较好地完成同心圆转动,可以满足喷雾机在不同工况下的转向需求。
关键词:高地隙自走式喷雾机;转向传动机构;转向定位参数;转向试验
中图分类号:S224.3 文献标识码:A 文章编号:20955553 (2023) 11005008
Design and optimization of steering system structure of high clearance
self-propelled sprayer
Li Wei Yang Fan Mao Enrong Shao Mingxi Li Zhixiang Du Yuefeng
(1. The Open University of China, Beijing, 100039, China; 2. Beijing Key Laboratory of Optimized Design for
Modern Agricultural Equipment, College of Engineering, China Agricultural University, Beijing, 100083, China;
3. College of Mechanical Engineering, Qinghai University, Xining, 810016, China)
Abstract:As an important part of high clearance self-propelled sprayer, the steering system directly affects the handling stability, driving smoothness and spraying efficiency of the sprayer. A reasonable steering transmission mechanism can effectively reduce the side slip and tire wear during the steering process of the sprayer. According to the structural characteristics and operating environment of the high clearance self-propelled sprayer, combined with the design requirements of the steering system, on the basis of the design and calculation of the steering positioning parameters, a steering transmission mechanism suitable for high clearance self-propelled sprayer was designed, meanwhile, the three-dimensional model was established, the parallel wheel jump test was conducted by ADAMS/Car, and the steering positioning parameters were optimized using ADAMS/Insight. The simulation results revealed that in the simulation test of the optimized steering system with a wheel jump amplitude of ±50 mm, the change range of the front wheel toe-in was reduced by 72%, the change range of the front wheel camber angle was reduced by 58.4%, and the change range of the vertical axis inclination angle was reduced by 16.9%, the change was significantly smaller and more gradual, which improved the handling stability of the whole vehicle and reduced the tire wear during the steering process. Based on the self-developed 3WPG-3000 high clearance self-propelled spray, a real vehicle test platform for the steering system was built, and the concentric steering trajectory of the spray under different steering modes was measured by the GPS equipment. The test results revealed that the steering radius was 6.85 m under two-wheel steering mode and 5.12 m under four-wheel steering mode. At the same time, the designed steering system could complete the concentric circle rotation well in different modes, which could meet the steering requirements of the sprayer under different working conditions.
Keywords:clearance self-propelled sprayer; steering transmission mechanism; steering positioning parameters; steering test
0引言
随着农业生产的发展,现代农业逐步向“高效、低耗、可持续”的精细化作业方式转变,國家对高效植保农业机械的研究与推广越来越重视。高地隙自走式喷雾机可适用于绝大多数作物播前、苗前的消毒和高秆作物生长至中后期的病虫害治理,具有智能化程度高、施药效率高、药量使用合理、施药均匀性好以及环境友好性强等特点,是一种理想的大田植保作业机械[13]。
转向系统作为高地隙喷雾机底盘系统的重要组成部分,是车辆正常行驶的重要保障,其性能的好坏直接影响了喷雾机的作业效率和质量、操纵稳定性能、安全性能以及轮胎的使用寿命[45]。大型高地隙自走式喷雾机具有高地隙、大质量、大体积的特点,在作业过程中易出现转向困难或因转向半径过大而压损作物和破坏土壤的问题。合理的转向传动机构可以有效减小车辆在转向过程中的侧滑量和前轮摆振,提高转向操纵稳定性并减少轮胎磨损。
转向系统优化设计方法主要有:(1)通过车轮轮跳试验分析转向系统的影响因素,构建转向悬架系统非线性模型进行优化[69];(2)以ADAMS/Car为平台,建立运动学模型,利用Insight对转向系统进行优化分析[1013];(3)应用空间机构学原理,对转向悬架系统结构的干涉问题进行断开点位置优化设计[1415]。王成志等[4]以刚体螺旋运动理论建立了麦弗逊悬架和配用转向机构运动模型,以最小转角误差为目标,对转向悬架系统进行优化,优化后的前轮前束角变化范围减小,转向性能得到改善。秦伟等[7]针对某轿车悬架系统,通过转向梯形断开点位置对阿克曼特性和前束角的影响分析及整车布局为限制条件,建立优化设计模型,通过仿真可知,优化结果减小了阿克曼转向偏差,提高了车辆操纵稳定性。张月[11]采用正交试验对轻型载货汽车底盘悬架系统参数进行优化设计,并利用ADAMS的Insight模块进行优化,找出了对目标影响较大的设计变量。董恩国等[13]利用ADAMS对车辆的转向梯形及车轮定位参数进行了优化设计。卞学良等[15]运用多刚体系统动力学中的R-W方法,建立了麦弗逊悬架转向梯形断开点位置优化模型,并通过实例计算验证了模型的可行性和正确性。
本文以大型高地隙自走式喷雾机转向系统传动机构为研究对象,综合考虑大型高地隙喷雾机作业环境、结构特点和转向系统设计要求,设计一种适用于大型高地隙自走式喷雾机的转向传动机构,对其转向定位参数进行设计计算,并以ADAMS为仿真平台,建立转向悬架系统仿真模型,对其转向定位参数进行优化分析,提高喷雾机转向系统的操纵稳定性和安全性。
1转向系统设计要求分析
大型高地隙自走式喷雾机体积较大,在作业过程中容易出现转向半径过大,或因转向侧滑而导致压损作物或破坏土壤的问题。
高地隙自走式喷雾机整机设计性能指标[16]如表1所示。
高地隙自走式喷雾机转向系统需要满足以下要求:
(1)转向过程中左、右车轮转角符合阿克曼理论。各车轮在转向过程中均绕其瞬时转动中心转动,且无侧滑现象。
(2)具有简单合理的结构形式。转向系统结构形式简单,便于驾驶员在复杂的作业环境中进行检修与维护,保证车辆的作业效率。
(3)便于高地隙悬架系统布置。高地隙喷雾机悬架系统结构复杂,体积较大,需转向系统配合以完成其结构布局。
(4)具有合理的转向轮定位结构和参数。转向定位参数设计不合理会引起喷雾机在作业过程中出现车轮跑偏、车辆无法保持直线行驶、轮胎磨损速度快以及车辆转向操纵性差等问题。
(5)便于液压系统布置。此类大型机械具有质量大、体积大、作业环境复杂的特点,在作业过程中需克服较大转向阻力,需采用液压转向系统,因此转向悬架系统在设计过程中需考虑液压系统的布置问题。
2转向传动机构设计
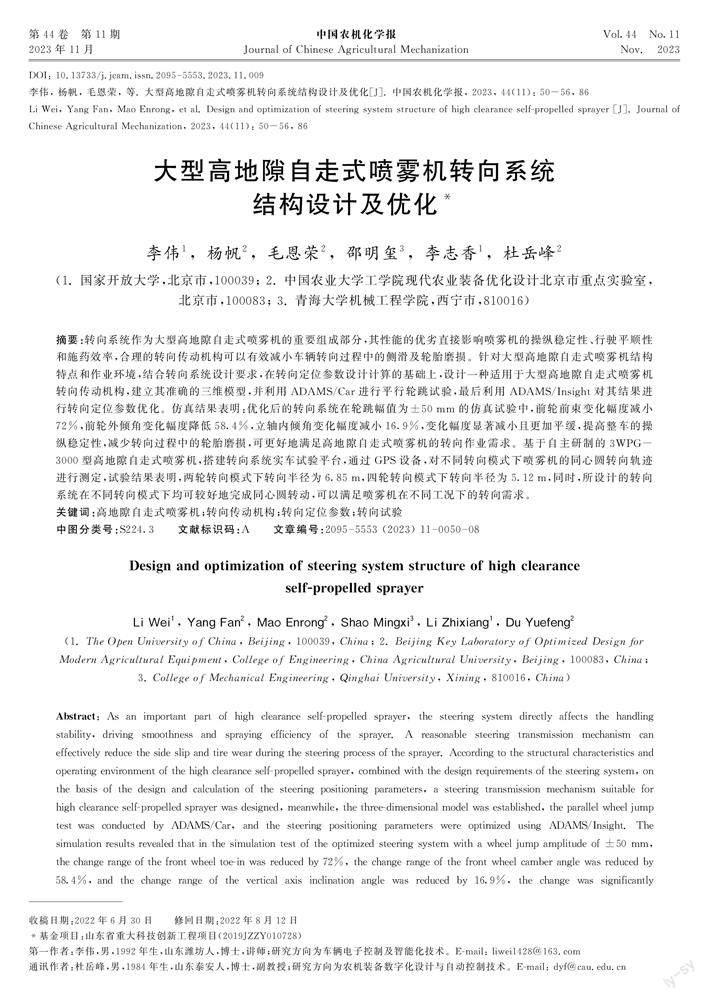
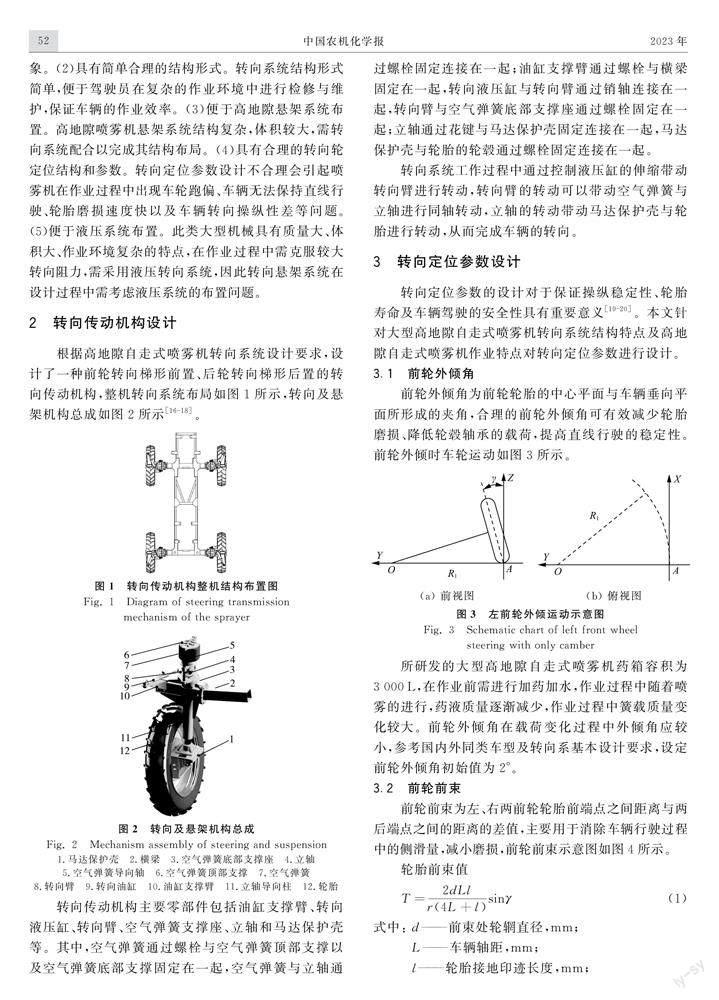
根据高地隙自走式喷雾机转向系统设计要求,设计了一种前轮转向梯形前置、后轮转向梯形后置的转向传动机构,整机转向系统布局如图1所示,转向及悬架机构总成如图2所示[1618]。
转向传动机构主要零部件包括油缸支撑臂、转向液压缸、转向臂、空气弹簧支撑座、立轴和马达保护壳等。其中,空气弹簧通过螺栓与空气弹簧顶部支撑以及空气弹簧底部支撑固定在一起,空气弹簧与立轴通过螺栓固定连接在一起;油缸支撑臂通过螺栓与横梁固定在一起,转向液压缸与转向臂通过销轴连接在一起,转向臂与空气弹簧底部支撑座通过螺栓固定在一起;立轴通过花键与马达保护壳固定连接在一起,马达保护壳与轮胎的轮毂通过螺栓固定连接在一起。
转向系统工作过程中通过控制液压缸的伸缩带动转向臂进行转动,转向臂的转动可以带动空气弹簧与立轴进行同轴转动,立轴的转动带动马达保护壳与轮胎进行转动,从而完成车辆的转向。
3转向定位参数设计
转向定位参数的设计对于保证操纵稳定性、轮胎寿命及车辆驾驶的安全性具有重要意义[1920]。本文针对大型高地隙自走式喷雾机转向系统结构特点及高地隙自走式喷雾机作业特点对转向定位参数进行设计。
3.1前轮外倾角
前轮外倾角为前轮轮胎的中心平面与车辆垂向平面所形成的夹角,合理的前轮外倾角可有效减少轮胎磨损、降低轮毂轴承的载荷,提高直线行驶的稳定性。前轮外倾时车轮运动如图3所示。
所研发的大型高地隙自走式喷雾机药箱容积为3 000L,在作业前需进行加药加水,作业过程中随着喷雾的进行,药液质量逐渐减少,作业过程中簧载质量变化较大。前轮外倾角在载荷变化过程中外倾角应较小,参考国内外同类车型及转向系基本设计要求,设定前轮外倾角初始值为2°。
3.2前轮前束
前轮前束为左、右两前轮轮胎前端点之间距离与两后端点之间的距离的差值,主要用于消除车辆行驶过程中的侧滑量,减小磨损,前轮前束示意图如图4所示。
3.3立轴后倾角
传统车辆的主销在高地隙喷雾机上由转向立轴替代,因此主销后倾角及主销内倾角在本文中称为立轴后倾角和立轴内倾角。
立轴后倾角α為立轴中心线与地面垂线所成夹角,其作用是使车轮产生主动回正力矩,保证车辆运行过程中的稳定性,立轴后倾角越大,轮胎偏转反作用力越大,车辆安全性越好,但立轴后倾角过大会使转向所需克服的反作用力也变大,导致转向困难,因此,立轴后倾角一般在3°以内。立轴后倾角示意图如图5所示。立轴中心轴线与地面交点n位于地面与轮胎接触点m前侧,车辆进行转向时,产生一个作用于点的垂直于车轮的向心力F0,向心力F0绕立轴轴线形成回转力矩Mα,m点到立轴中心线on的距离为e,计算如式(4)所示。
3.4立轴内倾角
立轴内倾角β为转向轴中心线与地面垂线之间的夹角,用于产生主动回正力矩,并使整车质量均匀分布在轴承上,降低转向零部件的磨损。主销内倾角示意图如图6所示。
当轮胎受力进行转向时,由于立轴后倾角的存在,轮胎及车身会向上部抬升一定距离h,当外力消失后,地面提供给的前向摩擦力转换为回转力矩Mβ使车轮回正。前轮和车身抬起的高度
根据上述公式计算所产生的回正力矩的大小以及所需转向力的大小,选择合适的立轴后倾角以及立轴内倾角,经计算后设定立轴内倾角初始值为8.7°。
因此,确定转向定位参数初始值:前轮前束初始值为9mm(即前轮前束角为0.28°),前轮外倾角初始值为2°,立轴后倾角为0°,立轴内倾角初始值为8.7°。
4转向系统仿真优化及分析
4.1仿真系统平台搭建
所设计的高地隙自走式喷雾机为独立式立轴空气悬架结构形式,转向系统为全液压转向系统,转向结构均左右对称,悬架及转向系统拓扑结构如图7所示。
根据悬架及转向系统拓扑结构图及所建立的三维模型,结合各零部件材料属性,对各零部件进行简化,在ADAMS/Car中建立前轮悬架及转向系统仿真模型,并对所建模型进行静平衡调整,ADAMS仿真模型如图8所示,仿真参数如表3所示。
4.2仿真优化及分析
在平行轮跳仿真试验中,设置轮胎垂向跳动位移为±50mm,实时监测转向定位参数在轮跳试验过程中随轮跳幅值变化而引起的参数变化范围,通过传感器模块测量优化前、后的平行轮跳仿真结果。
在仿真过程中首先对所建模型的各子系统进行静平衡调整,然后在ADAMS/Car仿真环境下进行平行轮跳试验,以前轮外倾角、前轮前束角和立轴内倾角在平行轮跳试验中变化范围更小为目标,利用ADAMS/Insight模块对其进行转向定位参数优化。经Insight优化后前轮前束角初始值为8mm(即前轮前束角为0.25°),前轮外倾角初始值为2°,立轴内倾角初始值为8.5°,立轴后倾角为0°。优化前、后的平行轮跳仿真结果如图9所示。
转向定位参数优化前、后在平行轮跳试验下的数据对比如表4所示。
由图9(a)和表4可知,在平行轮跳仿真试验中,优化前的前束角为(-0.179°~0.481°),变化幅度为0.006 6°/mm;优化后的前束角为(0.078°~0.256°),变化幅度为0.001 8°/mm,优化后的前束角变化幅度减小72%,变化趋势更加平稳,处于合理变化范围之内。
由图9(b)和表4可知,优化前的前轮外倾角变化范围为(1.093°~3.449°),外倾角变化幅度为0.023 56°/mm;优化后的外倾角变化范围为(1.805°~2.784°),外倾角变化幅度为0.009 79°/mm,变化幅度降低58.4%,优化后的变化幅度处于(-0.003°~0.015°)/mm设计要求范围内,满足设计要求。
立轴内倾角主要用于产生主动回正力矩,保证转向轻便,并使整车质量均匀分布在轴承上,减小转向零部件的损坏,立轴内倾角设计过程中应使其维持在(7°~13°)的范围内,以保证车辆转向过程中的转向轻便性。由图9(c)和表4可知,在平行轮跳仿真试验中,优化前的立轴内倾角变化范围为(7.429°~9.876°),而优化后的立轴内倾角变化范围(7.652°~9.684°),立轴内倾角变化范围由0.024 47°/mm减小为0.020 32°/mm,变化范围降低16.9%,可以更好地满足设计要求。
由平行轮跳仿真试验结果可知,优化后的转向定位参数可以更好地满足喷雾机转向系统作业需求。
5试验验证
5.1试验平台搭建
为验证所设计转向系统传动机构的合理性,根据转向系统优化结果研制3WPG-3000型大型高地隙自走式喷雾机转向系统,搭建转向系统实车试验平台(图10)。
转向系统试验平台主要由高地隙自走式喷雾机、全液压转向器、四轮转向阀、拉线式位移传感器、GPS设备以及测控系统(上位机、采集卡与供电装置)组成。
5.2试验结果
喷雾机车身中部位置安装GPS设备,用以接收喷雾机运动轨迹信号,同时,将喷雾机的轮距调节至3.6m,轴距为4m。试验过程中驾驶员将喷雾机行驶至A点,转动方向盘至极限转角,以5km/h的速度匀速行驶,分别在两轮模式和四轮模式下观测喷雾机运行轨迹及转向半径,GPS设备采集喷雾机运动轨迹如图11所示。
由图11可知,喷雾机在两轮转向模式下转向半径为6.85m,四轮转向模式下转向半径为5.12m。由轨迹图可知,喷雾机在两种转向模式下均可以完成同心圆转动,表明喷雾机转向系统可以较好地完成喷雾机在不同工况下的转向作业需求。
6结论
1) 根据高地隙自走式喷雾机作业环境和作业特点,提出高地隙自走式喷雾机转向系统设计要求。设计了一种适用于大型高地隙自走式喷雾机的转向传动机构,对转向定位参数进行了设计计算,初步设定了转向系统的前轮外倾角、前轮前束、立轴后倾角、立轴内倾角。
2) 根据所设计的转向系统定位参数,在Creo中建立高地隙自走式喷雾机转向机悬架系统三维模型;在进行必要的简化后将其导入ADAMS中进行平行轮跳仿真试验,以平行轮跳试验过程中定位参数变化最小为优化目标,利用Insight模块对转向定位参数进行了优化设计,优化后的前轮前束值为8mm,前轮外倾角为2°,立轴内倾角为8.5°,立轴后倾角为0°。
3) 平行轮跳试验结果表明,轮胎跳动位移为±50mm时,优化后前轮外倾角变化幅度由0.023 56°/mm减小为0.009 79°;前轮前束角变化值由0.006 6°/mm减小为0.001 8°/mm;立轴内倾角变化值由0.024 47°/mm减小为0.020 32°/mm。在平行轮跳试验下,优化后的转向悬架机构转向定位参数变化范围更小且更平缓,处于设计允许范围内,可以更好地满足大型高地隙自走式喷雾机转向系统的作业要求。
4) 搭建转向系统实车试验平台,利用GPS设备测定高地隙喷雾机在两轮转向和四轮转向模式下的同心圆转动轨迹。喷雾机在5km/h的速度匀速行驶模式下,两轮转向模式下轉向半径为6.85m,四轮转向模式下转向半径为5.12m,且两种转向模式下均可良好地完成同心圆转动,试验结果表明所设计的转向系统具有较好的响应性能,可以满足喷雾机在不同工况下的转向需求。
参考文献
[1]林立恒, 侯加林, 吴彦强, 等. 高地隙喷杆喷雾机研究和发展趋势[J]. 中国农机化学报, 2017, 38(2): 38-42.Lin Liheng, Hou Jialin, Wu Yanqiang, et al. Review and development trend of high clearance boom sprayer [J]. Journal of Chinese Agricultural Mechanization, 2017, 38(2): 38-42.
[2]邹雪健, 藏秀法, 王晓勇. 我国植保机械与施药技术现状及发展措施[J]. 农业科技与装备, 2014(12): 49-50.Zou Xuejian, Zang Xiufa, Wang Xiaoyong, et al. Status and development measures of plant protection machinery and pesticide application technique [J]. Agricultural Science & Technology and Equipment, 2014(12): 49-50.
[3]杨国旭. 我国农业机械发展现状及对策分析[J]. 吉林农业, 2010(11): 154.
[4]王成志, 王云超. 麦弗逊悬架螺旋运动分析及其优化设计[J]. 机械科学与技术, 2021, 40(1): 139-145.Wang Chengzhi, Wang Yunchao. Motion analysis and optimal design of macpherson steering suspension mechanism [J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(1): 139-145.
[5]姜立标, 刘坚雄, 程铖. 基于正交试验的矿用自卸车转向机构优化设计[J]. 中国机械工程, 2013, 24(15): 2036-2041.Jiang Libiao, Liu Jianxiong, Cheng Cheng. Optimization design of mining dump truck steering mechanism based on orthogonal test [J]. China Mechanical Engineering, 2013, 24(15): 2036-2041.
[6]王威, 陈军, 宋玉玲. 含双间隙模型轿车转向系非线性动力学特性研究[J]. 农业机械学报, 2013, 44(10): 41-46.Wang Wei, Chen Jun, Song Yuling. Nonlinear dynamic characteristics of cars steering system with double clearance models [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(10): 41-46.
[7]秦伟, 耿庆松, 黄勇刚, 等. 某车型麦弗逊转向悬架分析与优化设计[J]. 农业机械学报, 2014, 45(10): 15-21.Qin Wei, Geng Qingsong, Huang Yonggang, et al. Analysis and optimization of macpherson steering suspension [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 15-21.
[8]徐晓美, 石静, 张磊, 等. 后轮随动转向车辆非线性动力学特性研究[J]. 科学技术与工程, 2018, 18(5): 112-117.Xu Xiaomei, Shi Jing, Zhang Lei, et al. Nonlinear dynamic characteristics of the vehicle with rear wheel compliance steering [J]. Science Technology and Engineering, 2018, 18(5): 112-117.
[9]李田. 汽车拖车系统车身摆振机理与转向系影响研究[D]. 南京: 东南大学, 2020.Li Tian. Investigation of the mechanism of body sway and the influence of steering characteristics of car-trailer combinations [D]. Nanjing: Southeast University, 2020.
[10]石剑英. 大学生方程式赛车悬架和转向系统优化设计与仿真分析[D]. 锦州: 辽宁工业大学, 2019.Shi Jianying. Optimization design and simulation analysis of the suspension and steering system for the formula sae racing car [D]. Jinzhou: Liaoning University of Technology, 2019.
[11]张月. 某轻型载货汽车平顺性仿真与试验研究[D]. 北京: 北京理工大学, 2018.Zhang Yue. Research on ride performance simulation and tests of a light truck [D]. Beijing: Beijing Institute of Technology, 2018.
[12]门树东, 王平, 赵阳, 等. 载人月球车转向传动机构的优化设计及分析[J]. 机械传动, 2015, 39(8): 78-84.Men Shudong, Wang Ping, Zhao Yang, et al. Optimal design and analysis of steering mechanism of manned lunar rover [J]. Journal of Mechanical Transmission, 2015, 39(8): 78-84.
[13]董恩国, 张蕾. 基于ADAMS的车轮定位参数优化设计[J]. 中国农机化, 2006(5): 106-109.Dong Enguo, Zhang Lei. Optimization design based on ADAMS in alignment parameters on wheel [J]. Chinese Agricultural Mechanization, 2006(5): 106-109.
[14]勾治践, 鲍明全. 基于ADAMS/VIEW的双横臂式独立悬架转向梯形机构断开点位置的仿真分析[J]. 机械设计, 2007(3): 51-53.Gou Zhijian, Bao Mingquan. Simulative analysis on position of splitting point of steering trapezoidal mechanism of double wishbone typed independent suspension frame based on ADAMS/VIEW [J]. Journal of Machine Design, 2007(3): 51-53.
[15]卞学良, 马国清. 轮式车辆麦弗逊悬架转向梯形断开点位置优化设计[J]. 兵工学报, 2007(3): 262-266.Bian Xueliang, Ma Guoqing. Optimization of splitting point of mc pherson strut and steering mechanism for wheeled vehicle [J]. Acta Armamentarii, 2007(3): 262-266.
[16]陈雨. 高地隙喷雾机独立式立轴空气悬架设计方法与特性研究[D]. 北京: 中国农业大学, 2017.Chen Yu. Research on design methods and characteristics of independent strut type air suspension system for high clearance sprayer [D]. Beijing: China Agriculture University, 2017.
[17]Li W, Chen Y, Zhang S, et al. Damping characteristic analysis and experiment of air suspension with auxiliary chamber [J]. IFAC-Papers OnLine, 2018, 51(17): 166-172.
[18]Chen Y, Mao E, Li W, et al. Design and experiment of a high-clearance self-propelled sprayer chassis [J]. International Journal of Agricultural and Biological Engineering, 2020, 13(2): 71-80.
[19]汪步云, 彭稳, 梁艺, 等. 全地形移动机器人悬架机构设计及特性分析[J]. 机械工程学报, 2022, 58(9): 71-86.Wang Buyun, Peng Wen, Liang Yi, et al. Characteristics analysis and optimization design of suspension mechanism of all-terrain mobile robot [J]. Journal of Mechanical Engineering, 2022, 58(9): 71-86.
[20]楊一洋, 谢敏松. 转向主销定位参数和接地点偏距的解析研究[J]. 汽车工程, 2021, 43(5): 692-696.Yang Yiyang, Xie Minsong. An analytical study of alignment parameters and ground intersection offset of steering kingpin [J]. Automotive Engineering, 2021, 43(5): 692-696.
