设施蔬菜生产无人开沟施肥机设计与试验
2023-12-11戴有华吴丹金文忻刘旭
戴有华 吴丹 金文忻 刘旭

摘要:為促进设施蔬菜生产机械化,针对设施蔬菜生产中“开种植沟、沟内施肥、覆土稳沟”的农艺要求,设计一种设施蔬菜生产无人开沟施肥机。该机由行驶底盘系统、开沟施肥作业系统、液压传动系统、自动控制系统、供电系统等组成,一次可完成开沟、施肥、覆土、稳沟等作业4~6行。作业时,由手机APP经过运营商的NB-IoT与该机上的PLC通信,并由PLC控制柴油发动机启停及液压传动系统工作,再由液压传动系统驱动整机行驶及开沟施肥作业。设计过程中,通过UG软件对该机进行三维建模并对主要受力部件进行结构强度分析,得出机架的刚度需适当加强。田间试验结果表明:开沟施肥深度90~130mm、肥料细碎匀混度≥90%、施肥均匀度≥90%、覆土厚度≥50mm,沟底土面宽度约100mm、沟底土面深度30~70mm、沟形稳固度≥95%,持续施肥时长≥1个大棚,远程控制距离≥2km,即各项指标符合设计要求。该研究对提高设施蔬菜生产中开沟施肥作业的质量和效率、降低劳动强度和劳动成本,有着重要意义。
关键词:设施蔬菜;开沟机;施肥机;液压传动;PLC;NB-IoT
中图分类号:S222.4文献标识码:A文章编号:20955553 (2023) 11004307
Design and experiment of unmanned ditching and fertilizing machine for
facility vegetable production
Dai Youhua, Wu Dan, Jin Wenxin, Liu Xu
(Jiangsu Vocational College of Agriculture and Forestry, Zhenjiang, 212400, China)
Abstract:In order to promote the mechanization of facility vegetable production , a kind of unmanned ditching and fertilizing machine for facility vegetable production was designed according to the agronomic requirements of “opening planting ditch, fertilizing in ditch, covering soil and stabilizing ditch” in facility vegetable production. This machine is composed of driving chassis system, ditching and fertilizing operation system, hydraulic transmission system, automatic control system, power supply system, etc., which can complete 4-6 lines of operation such as ditching, fertilizing, soil covering, and stabilizing ditch at one time. During the operation, the mobile phone APP communicates with the PLC on the machine through the operators NB-IoT, and the PLC controls the start and stop of the diesel engine and the work of the hydraulic transmission system, and then the hydraulic transmission system drives the whole machine to travel and ditch and fertilize. In the process of design, the 3D model of the machine was built by UG software and the structural strength of the main stressed parts was analyzed, and the analysis showed that the frame stiffness needed to be strengthened appropriately. The field test results show that the depth of ditch fertilization is 90-130 mm, the fertilizer finely divided and evenly mixed degree is ≥90%, the uniformity of fertilization is ≥90%, the thickness of the covering soil is ≥50 mm, the width of the ditch bottom soil surface is about 100 mm, the depth of the ditch bottom soil surface is 30-70 mm, the stability of the ditch shape is ≥95%, the duration of continuous fertilization ≥ 1 greenhouse, and the distance of remote control is ≥2 km, which means that all the indicators meet the design requirements. This study is of great significance to improve the quality and efficiency of ditching and fertilizing operations, and to reduce labor intensity and labor cost in facility vegetable production.
Keywords:facility vegetables; ditching machine; fertilizing machine; hydraulic transmission; PLC; NB-IoT
0引言
设施蔬菜产业是劳动密集型产业,随着设施蔬菜生产用工难、用工贵问题的日益突出[1],设施蔬菜产业发展逐渐出现了瓶颈[2]。当前,设施蔬菜生产机械化已成为推动设施蔬菜产业持续快速发展的有效途径[3],然而,设施蔬菜生产机械化水平还较低[4]。农业农村部要求,到2025年,设施种植机械化水平总体达到50%以上[5]。因此,迫切需要农机农艺相结合地研发设施蔬菜主要生产环节使用的机械。
为实现“节水节肥”生产设施蔬菜,江苏、山东等地出现了沟内种植设施蔬菜的做法,但缺乏与此相适应的开沟施肥机。
现有的开沟施肥机多用于果园或茶园,开沟部件形式一般为犁式、链式、圆盘式、螺旋式,施用的肥料一般为固态肥,且开沟施肥机正朝着结合农艺、智能操作、精准施肥的方向发展[6]。吉俊宝[7]设计山地柑橘园开沟施肥机,适应柑橘园树冠较低、株距较小等特点;肖宏儒等[8]设计1KS60-35X型果园双螺旋开沟施肥机,降低耕作阻力和功耗,提高搅肥均度;李光新等[9]设计果园开沟施肥覆土机,适应红枣、葡萄等果园的深施肥的要求;夏瑞花等[10]设计2FPG-40型葡萄开沟施肥机,适应矮、密和搭棚的葡萄种植模式;高彬等[11]研制2KF-2自走式果园开沟施肥机,适用于苹果、核桃、红枣等果园;张海鹏等[12]设计茶园开沟施肥覆土一体机,满足丘陵山区茶园开沟施肥的要求;张园等[13]研制橡胶园开沟施肥机,适用于地势平坦的橡胶园开沟、施肥作业。
本文针对设施蔬菜生产中开沟施肥的农艺要求,设计一种设施蔬菜生产无人开沟施肥机,并进行结构强度分析和作业性能试验,以提高作业质量和效率、降低劳动强度和成本。
1整机结构与工作原理
1.1设施蔬菜生产中开沟施肥的农艺要求
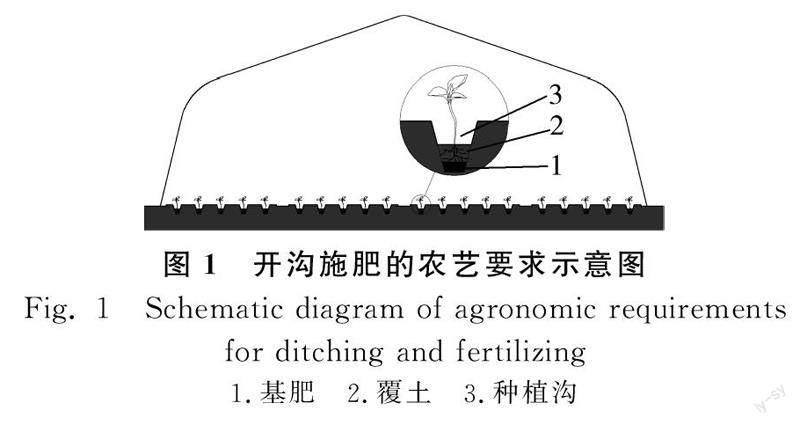
设施蔬菜生产采用的设施主要为单栋塑料大棚[14],考虑到设施的宜机化,故以8m宽的单栋塑料大棚为例。此外,在设施蔬菜生产中,一般要在耕整地环节施足基肥,且基肥应以有机肥为主[15]。经调研,沟内种植设施蔬菜的开沟施肥要求为:沿着塑料大棚的长度方向开种植沟、并沿沟底条形施肥、再覆土后压实稳沟,如图1所示,根据所种植蔬菜的品种不同,开沟的数量为16~24行、施肥深度为80~120mm、覆土厚度≥50mm、沟底土面宽度约100mm、沟底土面深度30~70mm。后期,可沿沟底长度方向适当间距地种植蔬菜,并可向沟内喷灌及追肥。
设施蔬菜生产无人开沟施肥机主要由行驶底盘系统、开沟施肥作业系统、液压传动系统、自动控制系统、供电系统等组成,如图2所示。
行驶底盘系统由机架、车轮、行驶液压马达、转向液压缸、制动液压卡钳等组成。开沟施肥作业系统由肥料箱、搅拌液压马达、输料管、开沟施肥器、覆土稳沟器等组成。液压传动系统由柴油发动机、V带传动、液压油箱、液压泵、液压阀组、转向液压缸、行驶液压马达、制动液压卡钳、搅拌液压马达、展折液压缸等组成。自动控制系统由电气控制柜、无线网关等组成。供电系统由柴油发动机、V带传动、直流发电机、蓄电池等组成。
设施蔬菜生产无人开沟施肥机的主要技术参数如表1所示。
1.3工作原理
设施蔬菜生产无人开沟施肥机作业时,柴油发动机通过V带传动向液压泵和直流发电机提供动力;液压油在液压阀组的控制下,使行驶液压马达、转向液压缸、制动液压卡钳工作,实现整机行驶;搅拌液压马达工作后,实现肥料箱底部的有机肥与无机肥被打碎、攪匀、推入输料管。
展折液压缸展平后端机架时,开沟施肥器开出小而深的沟、施入肥料,覆土稳沟器将沟两侧垄上碎土推入沟中覆盖肥料、挤压沟的底面和侧面得到小而浅的种植沟;展折液压缸抬起后端机架时,搅拌液压马达停止工作,整机只进行掉头、进出温室大棚等行驶;直流发电机协同蓄电池,为电气控制柜供电;无线网关将移动设备端的控制信号传至电气控制柜,进而控制液压阀组中的各电磁液压阀动作,以操控整机行驶和开沟施肥作业。后端机架上通过可调整装置安装几个开沟施肥器和覆土稳沟器,适应青椒、甘蓝、莴苣等蔬菜对开沟施肥的不同要求。
2关键部件设计
2.1机架
机架由主体机架和后端机架通过铰链联接而成,如图3所示,主体机架下部由四个车轮支承、上部承载柴油发动机、液压油箱、液压泵、电气控制柜、肥料箱等多个部件,后端机架仅用于安装开沟施肥器和覆土稳沟器。
后端机架可绕两铰链点连线向上抬起的最大角度为40°,使得开沟施肥器和覆土稳沟器可以离开地面。机架主要采用50mm×50mm×5mm的方钢管焊接而成,以保证足够的强度和刚度。
2.2肥料箱
根据农艺要求,设施蔬菜生产中施用的基肥是将鸡粪打碎、并与化肥按照大约2∶1的比例搅拌均匀而成,因此,肥料箱由箱体、隔板、叶片、出料口等组成,如图4所示。
箱体由4mm厚的钢板焊接而成,箱体的容积约为1m3,便于长时连续施肥;箱体内部前后大约2∶1位置处点焊联接隔板,隔板下部距箱体底面留有约30mm的距离,便于混合有机肥与无机肥。箱体底部靠边均匀分布6个出料口,使用的出料口连接输料管,不使用的出料口用盖子封住,以适应一次施肥4~6行的要求;箱体底面中心处等角间距地安装6个叶片,叶片都由箱体底部外侧的搅拌液压马达带动,叶片转动时,箱体底部的鸡粪被打碎、隔板下部的鸡粪与化肥被搅匀、混合肥料被推向出料口;叶片不转时,叶片及结块的鸡粪对出料口有遮堵作用,不容易漏料。
2.3开沟施肥器
开沟施肥器的前部下端呈尖铲形、中部为左右对称的挤土曲面、后部为空心的梯形,中部上端有进料口和立柱,如图5所示。
为便于入土和切土,尖铲形的入土角取α=30°、长度取L3=210mm;挤土曲面用于将推高的碎土分别挤向左右两侧;进料口和立柱焊接于开沟施肥器的中部上端,进料口用于联接输料管,立柱上的安装孔用于将开沟施肥器通过安装框架与后端机架联接;空心梯形用于形成沟形和排出肥料,梯形形状与所需沟形匹配,梯形上边宽度取L1=240mm、下边宽度取L2=40mm、高度取H1=250mm。
2.4覆土稳沟器
覆土稳沟器前部为较大的梯形板、通过调整孔与推土板联接,推土板为长方形板、调整孔用于调整推土板的安装高度,覆土稳沟器中部为中空的梯形体、梯形体两侧为挤土侧板、梯形体上端焊接立柱,如图6所示。推土板用于将各条种植沟间窄垄的上部推平压实、将一部分碎土推入沟中覆盖肥料,推土板高度L4=100mm;覆土稳沟器横截面的梯形与开沟施肥器后端的梯形匹配,覆土稳沟器中梯形高度L2=145mm,挤土侧板和底板挤压种植沟的侧面和底面,起稳固沟形作用;覆土稳沟器的立柱通过安装框架与后端机架联接。
通过柴油发动机为液压泵提供动力,再通过各液压阀、各液压马达、各液压缸来驱动整机行驶和开沟施肥作业。对于整机行驶,由调速阀、行驶三位四通电磁阀、行驶液压马达驱动后轮轴转动;由调速阀、转向三位四通电磁阀、转向双作用液压缸驱动前轮转向;由调速阀、制动二位三通电磁阀、制动液压卡钳控制车轮制动。对于开沟施肥作业,由调速阀、搅拌二位二通电磁阀、搅拌液压马达驱动肥料箱里的叶片转动;由调速阀、展折三位四通电磁阀、展折液压缸带动后端机架的抬起或展平。
3控制及通信系统设计
3.1自动控制系统
PLC是一种工业自动控制装置,能很好地满足液压与气动系统的控制要求[16],现采用西门子PLC进行该机液压传动系统的自动控制。
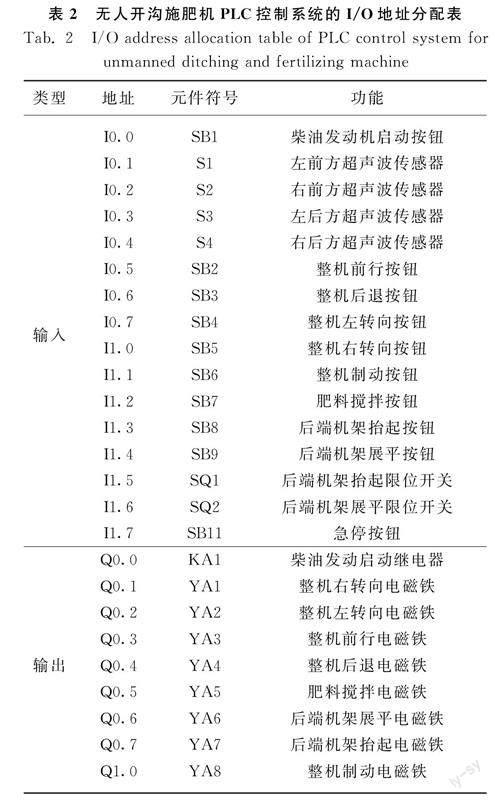
自动控制系统的硬件部分主要是西门子S7-200 SMART PLC、MCGS触摸屏、三位四通电磁阀、二位二通电磁阀、二位三通电磁阀、继电器、限位开关、MPBS超声波传感器等。西门子PLC控制系统的I/O接线图如图8所示,西门子PLC的I/O地址分配表如表2所示。
自动控制系统的软件部分采用西门子STEP 7-Micro/Win SMART软件进行梯形图编程,自动控制系统的程序流程图如图9所示。
对于整机行驶的控制,先按下启动按钮使柴油发动机工作,需要直行时再按下整机前进(后退)按钮控制行驶液压马达正(反)转即可;若要转向就按住整机左(右)转向按钮控制转向液压缸推杆右(左)移即可;若要制动就按住整机制动按钮控制液压卡钳制动即可;当整机四周的超声波传感器检测到障碍物时,会使整机制动等待操控;最后按下停止按钮可使柴油发动机停止工作。
对于开沟施肥作业的控制,要在柴油发动机工作的状态下,作业时先按住后端机架展平按钮控制展折液压缸推杆伸出、再按下肥料搅拌按钮控制搅拌液压马达转动即可;不作业时先按回搅拌按钮控制搅拌液压马达停转、再按住后端机架抬起按钮控制展折液压缸推杆缩回即可;后端机架展平(抬起)是否到位,由后端机架展平(抬起)限位开关控制。
3.2无线通信系统
NB-IoT是针对物联网设计的全新低功耗广域网蜂窝移动通信技术,广泛应用于智慧农业等行业[17],现采用NB-IoT技术构建该机的无线通信系统。无线通信系统由西门子PLC、网关DTU、通信基站、应用服务器、手机APP等组成,如图10所示,手机APP通过运营商现有的4G、5G等网络与应用服务器通信,应用服务器通过运营商的NB-IoT网络与网关DTU通信,網关DTU通过RS485线与西门子PLC通信,从而实现手机APP与西门子PLC的双向无线通信。
4样机的三维设计及强度分析
4.1样机的三维设计
UG软件是一个集成化的CAD/CAE/CAM软件,广泛应用于农机装备等领域[18],现采用UG软件进行设施蔬菜生产无人开沟施肥机的三维设计与强度分析。该机的三维设计过程是:先根据整机设计尺寸和外购件尺寸,对各零部件进行三维建模,建模时可对零部件进行适当简化且相同零部件只需创建一次,然后将各零部件进行虚拟装配,最后才创建电线、油管、输肥管等。创建完成的样机三维模型如图11所示,其可用于指导样机的实际试制过程。
4.2样机的强度分析
如图12所示为机架的结构强度云图。
设施蔬菜生产无人开沟施肥机承受的载荷较大,因而需要对其进行结构强度分析,但由于该机的主要受力部件为机架,故着重对机架进行强度分析即可。为了准确表达机架的受力情况,取机架和展折液压缸等作为受力分析对象,在UG软件的强度分析环境下,设置材料为Steel、单元类型为CTETRA(10)、单元大小为20mm进行网格划分,并设置主体机架下部四个立柱的底面为固定面,考虑满载情况及安全裕度,再设置主体机架前部承受来自柴油发动机等的下压力7 000N、中部承受来自肥料箱等的下压力5 000N,以及设置后端机架承受来自开沟稳沟的作业阻力3 000N,最后应用NX Nastran解算器进行求解,得到强度分析结果。从单元应力云图看出,机架承受的最大应力为53.96MPa,即机架的强度是足够的;从节点位移云图看出,机架产生的最大位移出现在最后端、数值为2.548mm,即机架的刚度稍显不足,可适当提高后端机架和展折液压缸等的刚度,以保证开沟稳沟的作业质量。
5试验与结果分析
5.1试验条件
2022年9月,在句容市某蔬菜生产基地进行了现场试验。天气晴朗,温室大棚宽度8m、长度≥30m,土地已经翻耕碎土整平、土块较紧实、土壤湿度20%左右,肥料为鸡粪和化肥。一次开沟施肥5条蔬菜种植沟、总宽度接近2m,两个来回完成一个温室大棚里的开沟施肥作业。
5.2试验方法
参考NY/T 740—2003《田间开沟机械作业质量》、GB/T 20346.2—2006《施肥机械试验方法》等标准,沿每条蔬菜种植沟的每隔500mm设置一个测量点、每条沟上不少于20个测量点,测量开沟施肥深度、覆土厚度、沟底土面宽度、沟底土面深度、沟顶宽度等。
5.3试验结果分析
在设施蔬菜生产无人开沟施肥机进入温室大棚进行开沟施肥作业后,进行各项作业性能参数的测定,试验结果如表3所示。鸡粪打碎并与化肥的搅拌匀混度和稳定作业时施肥均匀度都大于等于90%,即施肥效果较好;覆土厚度、沟底土面宽度和沟顶宽度都接近设计值、沟底土面深度50mm是在设计范围内,但开沟施肥深度130mm为偏深,主要是由于开沟施肥后地面自然升高和保证覆土厚度;沟形稳固度95%为较高,得益于覆土稳沟器对土壤的压实作用;作业速度可以较高,主要考虑作业速度要与施肥量适度匹配;整机行驶灵活度85%为稍低,主要表现满载时在温室内转弯调头不够灵活;持续施肥时长超过施肥1个大棚的要求,是为了保证每次在大棚外添加肥料;远程控制距离可比设计值大,主要是窄带物联网信号比较好。
6结论
1) 针对设施蔬菜生产中开沟施肥的作业要求,设计了无人开沟施肥机的行驶底盘及可折叠的机架、容积约1m3的肥料箱、高250mm上宽240mm下宽40mm的开沟施肥器、高145mm上宽240mm的覆土稳沟器等。能够在温室大棚内一次开沟施肥4~6行、开沟施肥深度可调节,具有沟形准确稳固、施肥连续平稳的效果,而且比人工作业的劳动效率提高15倍以上、劳动强度下降70%以上。
2) 为实现对无人开沟施肥机行驶及开沟施肥作业的远程控制,设计了液压传动系统、PLC控制系统和NB-IoT通信系统。远程控制距离≥2km,使工人可以远距离操控开沟施肥作业,改善作业环境。
3) 田间试验结果表明:开沟施肥深度90~130mm、肥料细碎匀混度≥90%、施肥均匀度≥90%、覆土厚度≥50mm,沟底土面宽度约100mm、沟底土面深度30~70mm、沟形稳固度≥95%,持续施肥时长≥1个大棚,即各项指标符合设计要求。
4) 设施蔬菜生产无人开沟施肥机是面向当前沟内种植设施蔬菜的做法而设计的,值得抓紧应用推广,同时,也为设计其他无人化农机装备,提供了技术参考。
参考文献
[1]於锋, 马立新, 孙志远. 江苏省设施蔬菜机械化分析研究[J]. 中国农机化学报, 2016, 37(10): 86-90.Yu Feng, Ma Lixin, Sun Zhiyuan. Study on the facility vegetable mechanization in Jiangsu Province [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(10): 86-90.
[2]严建民, 柳军, 罗克勇, 等. 江苏设施蔬菜机械化生产发展思路探讨[J]. 江苏农业学报, 2014, 30(6): 1480-1483.Yan Jianmin, Liu Jun, Luo Keyong, et al. Development ideas of mechanized production of facility vegetable in Jiangsu Province [J]. Jiangsu Journal of Agricultural Sciences, 2014, 30(6): 1480-1483.
[3]魏安民, 何圣米. 设施蔬菜基地机耕整地农机农艺融合技术[J]. 长江蔬菜, 2021(15): 7-10.
[4]陈永生, 高庆生, 管春松, 等. 小型农机在设施蔬菜生产中的应用前景[J]. 长江蔬菜, 2018(18): 20-22.
[5]农业农村部. 关于加快推进设施种植机械化发展的意见[EB/OL]. http://www.moa.gov.cn/govpublic/NYJXHGLS/202006/t20200629_6347402.htm, 2020-06-27.
[6]宋月鹏, 张紫涵, 范国强, 等. 我国果园开沟施肥机械研究现状及发展趋势[J]. 中国农机化学报, 2019, 40(3): 7-12, 25.Song Yuepeng, Zhang Zihan, Fan Guoqiang, et al. Research current situation and development trend of orchard ditching and fertilizing machine in China [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(3): 7-12, 25.
[7]吉俊寶. 山地柑橘园开沟施肥机的设计与研究[D]. 武汉: 华中农业大学, 2013.Ji Junbao. The design and research of mountainous citrus orchard ditching and fertilizing machine [D]. Wuhan: Huazhong Agricultural University, 2013.
[8]肖宏儒, 赵映, 丁文芹, 等. 1KS60-35X型果园双螺旋开沟施肥机刀轴设计与试验[J]. 农业工程学报, 2017, 33(10): 32-39.Xiao Hongru, Zhao Ying, Ding Wenqin, et al. Design and experiment on blade shaft 1KS60-35X type orchard double-helix trenching and fertilization machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(10): 32-39.
[9]李光新, 刘建成, 官鑫, 等. 果园开沟施肥覆土机的设计与试验[J]. 甘肃农业大学学报, 2017, 52(3): 154-160.Li Guangxin, Liu Jiancheng, Guan Xin, et al. Design and test of ditching-fertilizing-covering machine of orchard [J]. Journal of Gansu Agricultural University, 2017, 52(3): 154-160.
[10]夏瑞花, 吴董军, 蒙贺伟, 等. 2FPG-40型葡萄开沟施肥机的设计与试验[J]. 中国农机化学报, 2018, 39(12): 36-40.Xia Ruihua, Wu Dongjun, Meng Hewei, et al. Design and experiment of 2FPG-40 grape ditching fertilizer combined machine [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(12): 36-40.
[11]高彬, 谢新亚, 张俊三, 等. 2KF-2自走式果园开沟施肥机的研制[J]. 新疆农机化, 2020(3): 17-18.Gao Bin, Xie Xinya, Zhang Junsan, et al. Development of 2KF-2 Self-propelled orchard ditching fertilizer applicator [J]. Xinjiang Agricultural Mechanization, 2020(3): 17-18.
[12]张海鹏, 林聪, 陈凌霄, 等. 茶园开沟施肥覆土一体机的设计与试验[J]. 中国农机化学报, 2022, 43(3): 28-35.Zhang Haipeng, Lin Cong, Chen Lingxiao, et al. Design and analysis of an integrated machine for trenching, fertilizing and mulching in tea plantations [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(3): 28-35.
[13]张园, 邓怡国, 韦丽娇, 等. 橡胶园开沟施肥机的研制与试验分析[J]. 现代农业装备, 2016(5): 50-54.Zhang Yuan, Deng Yiguo, Wei Lijiao, et al. Development and experimental analysis of ditching fertilizer application in rubber [J]. Modern Agricultural Equipment, 2016(5): 50-54.
[14]陳杰, 李晓强, 吴军辉, 等. 上海设施蔬菜宜机化生产难点和对策建议[J]. 长江蔬菜, 2021(21): 8-12.
[15]连进华. 设施蔬菜种植技术[M]. 石家庄: 河北科学技术出版社, 2016.
[16]黄志坚. 液压气动系统PLC控制入门与提高[M]. 北京: 化学工业出版社, 2019.
[17]朱祥贤, 吴冬燕. NB-IoT应用技术项目化教程[M]. 北京: 机械工业出版社, 2019.
[18]王海涛, 张琦. UG NX 11.0 工程设计[M]. 北京: 北京理工大学出版社, 2016.
