一种基于FPGA 的二维精密伺服控制系统设计
2023-12-10王振杨乾远王琛刘金标蒋祖运申永
[王振 杨乾远 王琛 刘金标 蒋祖运 申永]
伺服转台作为无线光通信中跟瞄系统的重要组成部分,作用是执行对信标的搜索、跟踪和对准[1~2],随着无线光通信技术在航空、航天领域不断深入,对伺服控制的精度和性能在不断提高[3],目前大多采用串行结构的单片机[4]或DSP[5~6]实现,对多轴系统支持不足,存在的一些FPGA 方案,或与DSP 协同完成、或算法复杂,降低了实时性和精度,易产生振荡,因此急需一种纯硬件描述语言实现的高效伺服系统。高效的伺服控制必须以约10~100 kHz 的速率循环执行矢量控制算法[7],FPGA 能以百万赫兹并行执行算法、采集数据、实时控制和处理通信,效率远高于微处理器,是伺服控制的最佳选择;系统以三相直流无刷电机为控制对象,设计一种基于FPGA 的二维伺服控制系统,并进行了实验,取得了优良效果,对高精度、高性能跟瞄系统的研制有十分重要的意义。
1 系统总体设计
1.1 控制系统组成
控制系统主要由控制系统、方位和俯仰伺服电机、三相逆变器桥、三相电流采集模块和编码器组成,系统组成如图 1 所示。
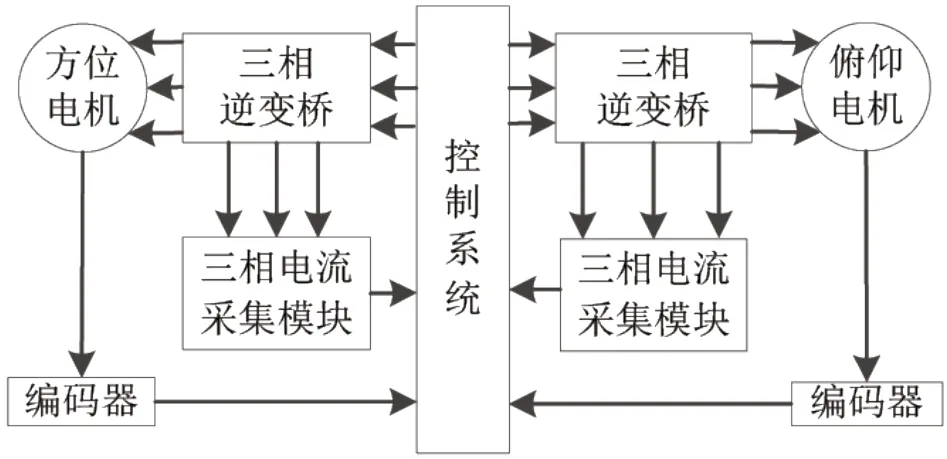
图1 系统组成框图
控制器选择Altera 公司型号为EP3C40F324 的FPGA,用于算法执行、编码器解码以及PWM 产生等功能。三相逆变桥选择TI 公司的驱动器DRV8312,体积小、驱动力大。电流采集模块选择CROSS-CHIP 公司的霍尔效应电流传感器CC6902,在5 V 电压输入下,输出在0.2~4.8 V 间线性变化。编码器采用SPI 接口24 bit 高分辨率绝对式光栅编码器。电机参数,额定电压24 V,额定电流3.3 A,极对数4,额定力矩0.315 N.m,转动惯量0.135 kg.CAm²,额定转速3 600 r/min。
1.2 控制系统设计
要实现二维伺服系统对激光信标快速且精确的跟踪和对准,控制系统需要设计电流环、速度环和位置环[8],控制原理如图2 所示,从内到外分别为电流环;速度环和位置环;电流环的作用是改善系统动态性能,速度环的作用是提高伺服转台平稳性,位置环的作用是及时反馈位置信息并快速精确地跟踪定位[9]。速度环和位置环简单,不需要解耦控制参数,可根据调试效果选取PI 控制参数,因此主要论述电流环的实现。
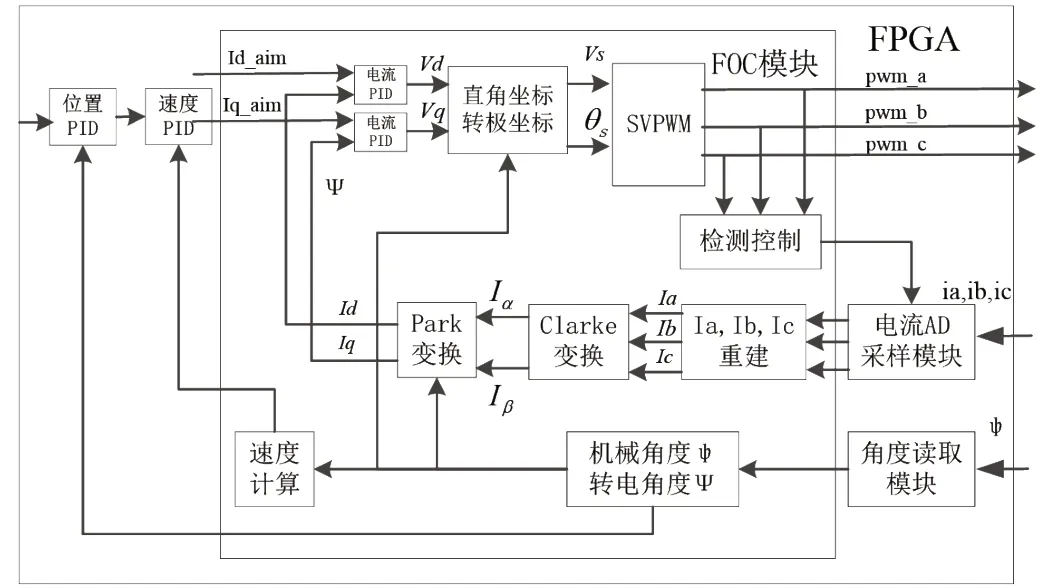
图2 控制原理图
系统实现了极坐标系下的伺服控制参数的解耦,降低了控制复杂度,并进行了优化设计。根据自顶向下设计原则,对进行模块划分,在顶层例化功能模块,进行仿真和实验验证;模块包括:坐标变换模块、极坐标系转换模块、SVPWM 调制模块。
2 控制算法设计
控制系统主要包含clarke 变换、park 变换、极坐标系转换模块和SVPWM 调制子模块。为了提高电机工作效率,设置励磁电流id=0[10],使定子电流全部用于产生转矩。
2.1 坐标变换
2.1.1 Clark 变换
如图 3 所示为Clarke 变换[11],将三相时变系统(ia,ib,ic)投影转换为两相时变系统(iα,iβ),减少一个控制维度,降低控制复杂度。假设a轴和α轴重合,三相信号(ia,ib,ic)由相隔120°的三个不同轴表示,经过Clarke变换后,向量的投影便可以仅由两个正交分量(i α,iβ)
根据图3 的投影原理,利用求解该系统的矩阵乘积,直接得出转换公式:
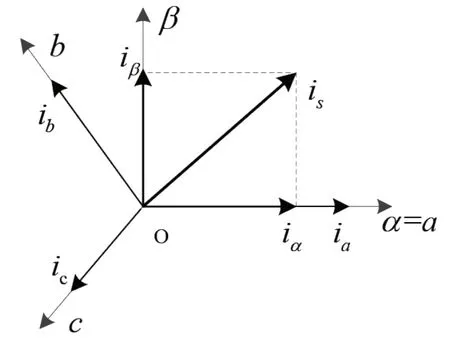
图3 Clarke 变换和投影
式(1)仍然是时变的,但减少了一维变量。由于FPGA 不善于算术运算,更适合移位运算,因此,给等式左右都乘来消除除法,再利用麦克劳林公式逼近。
我国苜蓿的单产水平与加拿大、美国等国家相比相对较低,究其原因施肥技术不成熟。我国苜蓿生产中普遍存在不施肥现象,在苜蓿施肥方面的研究不足,即便施肥,盲目性也很大[5,16]。因此,定期测定土壤肥力以确定苜蓿是否施肥和施用何种肥料必要而科学。近年来,有关苜蓿在肥料配施对其鲜干草产量、农艺性状、品质和生产性能等方面的影响的研究较多,且这些研究也多见于河北、吉林、新疆、宁夏等地区[5,14-15,17]。
用麦克劳林级数公式逼近(1 +2)1/2得:
上述处理方法的性质不变,但可在FPGA 中计算,且提高了运算速度,与查表法相比,该方法可增加展开项得到任意精确位数。
2.1.2 Park 变换
如图4 所示为Park 变换[11],将Clarke 变换输出的正交时变系统(iα,iβ)转换为两相旋转时不变系统(id,iq),可降低控制复杂性,要求d 轴与转子磁通对齐。

图4 Park 变换及其正交投影
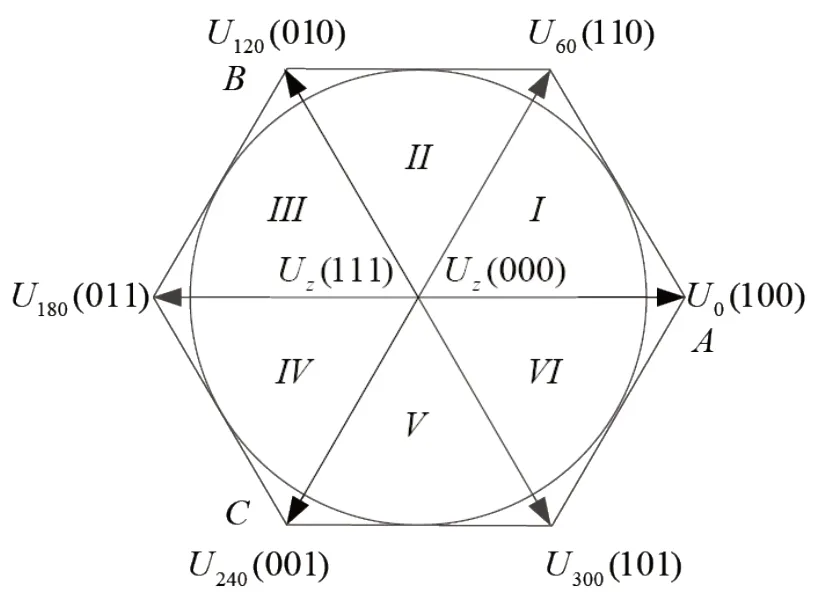
图5 基本电压空间矢量
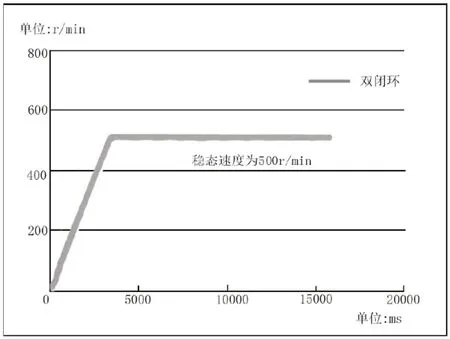
图6 电机闭环启动速度曲线

图7 改变指令后的速度响应曲线
利用投影原理可以得出转换公式。
式(2)中,θ是转子磁通位置,设d 轴与转子磁通对齐,为旋转时不变系统,公式涉及到乘加运算和角度的正余弦计算,常用的正余弦查找表法精度受FPGA 资源限制,对24bit 的编码器不能满足要求,采用FPGA 的CORDIC(Coordinate Rotation Digital Computer)的数字旋转模式,利用移位及加/减算术运算来直接完成矢量旋转变换,CORDIC 算法旋转模式比较均衡,计算速度快和精度高,且适合于用数字硬件实现。
2.2 电压的K/P 变换
用电压矢量的模和角度代替d 轴和q 轴分量对电机进行控制,有助于减少控制过程中的系统元件,简化控制过程并减少控制的执行时间。设极坐标系的电压矢量幅值为ρ,极坐标系的电压矢量角度为θ,id和iq为旋转直角坐标系中d 轴和q 轴分量的分量,速度环输出的电流送入电流PI 控制器得到电压值vd和vq,vd和vq为直角坐标系中的点,则直角坐标系到极坐标系的变换(K/P 变换)为:
式(4)分母vd易溢出,进一步处理:
利用cordic 算法的向量模式实现从直角坐标系到极坐标的转化得到ρ和θ,cordic 算法空间占用少,计算速度快,然后将ρ和θ输出给SVPWM 模块。
2.3 极坐标下SVPWM 的Verilog 实现
上一节得到SVPWM 的输入控制量ρ和θ,ρ为参考电压矢量Uref,θ为参考电压矢量移相角,以ρ和θ正弦函数值控制调制过程。
2.3.1 矢量作用时间分析
极坐标下电压矢量所在扇区由θ得到,首先确定相邻两个基础矢量作用时间。如图 5 所示,六个矢量下标表示其在矢量圆中位置[12],括号中数表示开关状态,8 个基础矢量U0(100)、U60(110)、U120(010)、U180(011)、U240(001)、U300(111)、U300(101)、Uz(000),其 中Uz(111)、Uz(000) 是零矢量,不产生磁场,用来调制矢量作用时间。
合成的参考电压矢量Uref由所在扇区的两个相邻非零矢量Uk、Uk+1以及零矢量按作用时间比例构成;假设Uk为先作用的有效基础矢量,Uk+1为后作用的有效基础矢量,则Tk为先作用的有效基础矢量的作用时间,Tk+1为后作用的有效基础矢量的作用时间,参考电压矢量Uref的表达式为:
式(5)、(6)中,U0为零矢量UZ(111)、UZ(000),Ts为调制周期,Tk为矢量Uk作用时间,Tk+1为矢量Uk作用时间,Uk为矢量U0作用时间。基础矢量的扇区对应见表1。

表1 基础矢量扇区对应表
在第一扇区有:
式(7)、(8)为第一扇区Uk和Uk+1的矢量作用时间,θ为参考电压矢量Uref的旋转角度;Udc是逆变器直流电压;其它扇区的Tk和Tk+1可根据投影原理获得。
2.3.2 PWM 占空比计算
在第一扇区中,用周期Ts单位幅值等腰三角波对正弦波信号采样,采样值如下:
式(9)、(10)和(11)中,tk为先作用矢量Uk开始作用时刻,t(k+1)为后作用矢量开始作用时刻,t0为零作用矢量开始作用时刻,θ为参考电压矢量Uref的旋转角度。
设比较参数为Va、Vb和Vc,则有:
式(13)适用于第1、3、5 扇区;式(14)适用于第2、4、6 扇区;
将周期为Ts的单位幅值的等腰三角形锯齿波与比较参数Va、Vb和Vc进行比较,当周期为Ts单位幅值的等腰三角形锯齿波小于Va、Vb或Vc时,所获得SVPWM 调制波对应为低电平;当周期为Ts的单位幅值的等腰三角形锯齿波大于等于Va、Vb或Vc时,所获得的SVPWM 调制波对应为高电平,从而获得第一扇区的SVPWM 调制波,按上述方法,可获得其他五个扇区的SVPWM 调制波。
3 实验验证及结果
根据控制原理图,搭建实验环境,对系统的功能和性能进行验证。实验选择Xilinx 公司的Artix7 系列FPGA,编译环境为Vivado2018.3,采用System Verilog 语言,仿真工具为ModelSim SE-64 10.4。
3.1 闭环稳定性验证
如图 6 所示,速度给定500 r/min,启动电机,电机能从静止状态平滑启动;速度曲线很快稳定到500 r/min。曲线平滑,转矩稳定;稳态误差小。
增大速度指令为800 r/min,如图 7 所示,在9 000 ms时刻稳态进入800 r/min,平稳跟随,转子负载增加或减少,相电流幅值相应增大或减少,系统能够双闭环稳定控制。
3.2 响应时间验证
d 相电流环和q 相电流环的控制参数相同,只需对d相电流环测试验证。d 相电流环输入给定为最大幅值1.5 A。采集电流反馈数据,通过整定增量式PI 算法[13~15]参数。最终测试验证效果,电流环响应时间约为1.6 ms,满足控制要求,与DSP 控制方案[16~17]的电流环响应时间相比,动态性能较好。
3.3 精度对比验证
如图8 所示,分别采用DSP 和FPGA 方案,给定转速为s,在其它相同条件下对比试验,FPGA 方案的控制精度要比DSP 方案高,DSP 的速度误差范围为,FPGA 的速度误差范围为s。
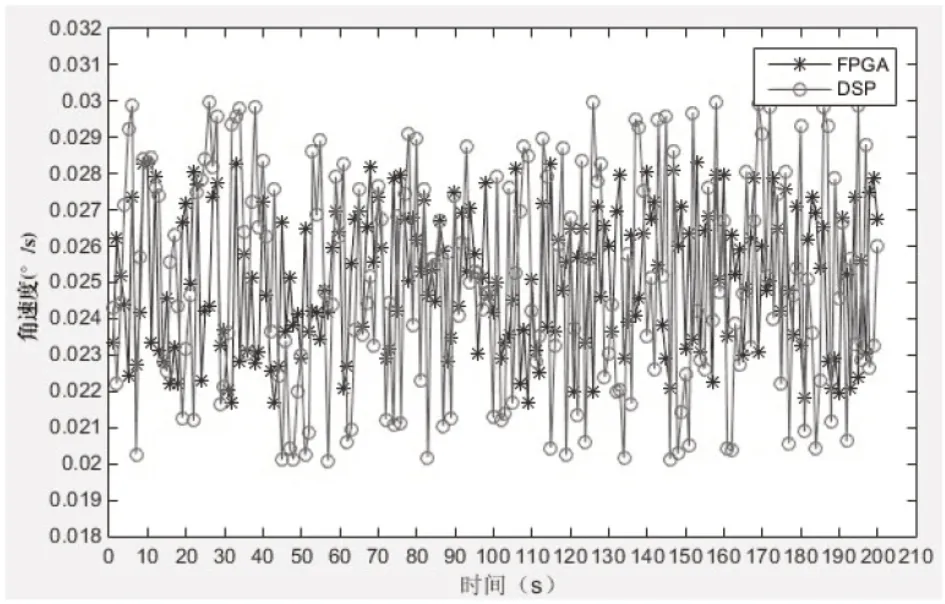
图8 速度对比曲线
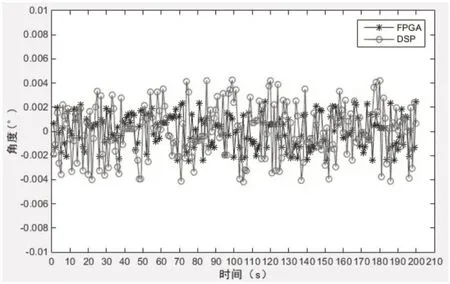
图9 位置对比曲线
如图 9 所示,分别采用DSP 和FPGA 方案,给定位置指令为0,试验得出,FPGA 控制方案的位置控制精度要比DSP 方案精度高,DSP 控制的位置误差在范围为0.008,FPGA 控制的位置误差范围为0.004。
以上对比表明,系统设计的基于FPAG 的电机控制系统在速度和位置控制精度上具有一定优越性,能满足转台控制使用要求。
4 结束语
对无线激光通信中二维伺服控制系统进行了详细设计,并对关键功能和性能指标进行了实验验证,结果表明该二维伺服控制系统结构简单、稳定可靠,实时性强,具有较好的动态性能和静态性能,满足系统设计指标要求,并且该系统的实现有助于减少控制芯片和器件的数量,减小卫星通信设备的体积和重量;对后续研制更高精度和性能伺服系统具有指导意义和参考价值。
