输电通道交叉跨越段导地线异物三维信息检测
2023-12-08朱登杰李锐海廖永力张志强何锦强
朱登杰, 李 昊, 李锐海, 廖永力, 张志强, 何锦强
(1. 华北电力大学 能源动力与机械工程学院, 河北 保定 071003; 2. 南方电网科学研究院有限责任公司 生产技术支持中心, 广东 广州 510000)
近年来,随着电力系统的快速发展,输电通道分布越来越多,整个输电网络变得尤为复杂。此外,由于地形和环境条件不同,当输电线出现异物缠绕时,一旦无法及时维护,极易出现安全事故。尤其是在春秋大风季节,分布在输电通道旁的施工围网、广告气球、横幅、风筝以及塑料袋等,在大风作用下经常缠绕在输电线路导地线上,有可能导致线路出现单相接地短路或者相间短路,最终跳闸。因导地线异物缠绕而出现的故障占比不断增加,为了保证输电通道的正常运行,对导地线异物信息进行高效准确的智能检测十分必要。
路艳巧等[1]基于边缘计算提出一种输电设备异物检测方法。通过边缘设备对采集到的异物图像进行分析处理,利用Mobilenet与优化后的单激发多框探测器(single shot multibox detector,SSD)目标检测方法对处理后的图像进行异物识别与提取;引入深度学习算法,通过Softmax分类器输出异物检测结果。杨剑锋等[2]利用深度学习算法实现对输电线路的异物检测与识别。首先,分别选取正常运行线路图像和包含异物的图像,利用相关算法对图像进行扩充;然后,将原始YOLOV-(3)网络的倒数第二层用Dense-net来代替,建立Dense-YOLOV-(3)深度学习网络模型;最后,利用扩充后的图像对模型进行训练,确定模型深度,实现对输电线路异物的检测与识别。
利用无人机实现输电线的异物巡检已经得到广泛应用,但是无人机采集输电线图像后,对于图像中动态异物的特征跟踪定位是目前亟需解决的问题。为了解决该问题,本文提出输电通道交叉跨越段导地线异物三维信息检测方法。在确定异物图像的三维信息后,明确异物在世界坐标系中的具体位置,利用基于特征跟踪的方法采集其姿态、位移以及位置等信息,实现连续跟踪定位,最后计算异物与导地线之间的安全距离是否在允许范围内,保障输电通道安全稳定运行。
1 导地线异物三维图像检测方法设计
1.1 基于立体视觉理论的异物三维坐标信息转换
无人机的摄像头坐标系采用单目系统,对任何类型的物体都无法准确得到其深度信息,因此在异物检测方面用途受限。本文利用双目理论,通过坐标转换结合单帧图像,获取无人机采集的导地线异物三维信息[3]。双目视觉理论将两架摄像机分别放置于输电线路两侧进行实时拍摄,不同的拍摄角度使图像产生了一定的视差,运用相关数学方法[4]即可计算得到异物的三维信息。双目视觉架构图如图1所示。
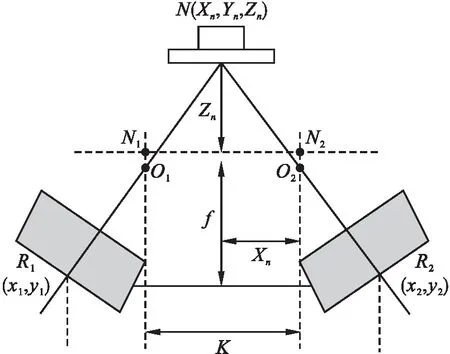
图1 双目视觉架构图Fig.1 Architecture diagram of binocular vision
图1中,N1、O1分别为摄像机1的像心和光心,N2、O2分别为摄像机2的像心和光心,点N是位于异物上的随机点,坐标点参考的是世界坐标系[5],点R1和R2分别为异物在两架摄像机成像平面坐标系上的坐标点。结合上述理论,可扩展到人机采集输电线图像中的三维深度信息获取过程。
当采集的无人机输电线图像处于同一水平面时,水平输电线成像平面上的y坐标系完全相同,结合这一特点,根据双目立体视觉定理即可推理得到点N在世界坐标系中Z轴的坐标值,即
(1)
式中:f为图像传感器焦距;K为基线距;x1、x2分别为点N在无人机采集的输电线成像平面中,X轴的坐标值。进一步推理可得到点N在世界坐标系中X轴和Y轴的坐标值,即
(2)
(3)
式中,y为点N在输电线成像平面中Y轴的坐标值,y=y1=y2。
经过上述计算可得到输电通道导地线上异物的三维信息,进一步推理还可得到异物的深度信息,将此作为异物是否对导地线正常运行产生影响的判断依据。
1.2 畸变参数的矫正
无人机图像传感器在获取导地线异物图像时,存在一部分的畸变参数,系统标定的目的就是改变这些参数,从而确定图像传感器的相对位置信息。
在双目视觉理论中,只有得到两架摄像机准确的相对位置信息,才能最终实现对异物深度信息和三维信息的获取。由于本文使用的是单架摄影的无人机,所以建立的公共坐标系是通过笛卡尔世界坐标系完成的[6]。确定异物信息在公共坐标系中的位置,得到无人机图像传感器坐标系与世界坐标系的关系,进一步推理得到无人机和异物之间的相对位置。
1.3 异物三维信息检测
通过双目系统标定原理确定无人机与异物的具体位置后,需要进一步检测异物的三维信息。采用双边滤波算法对图像完成输电线图像预处理,通过对连续帧序列图像的位置跟踪,利用双目视觉系统确定三维信息,以此来实现对异物的检测。
1) 图像获取。通过无人机在不同的输电线路上实时获取异物连续帧图像[7]。
2) 图像预处理。双边滤波是空间域非线性图像处理算法的一种,该算法可在去噪的同时保留更多的边缘信息[8],因此,本文将其作为图像预处理的实现方法。双边滤波算法是在加权平均原理[9]的基础上,分析图像各像素之间的距离以及像素值对图像的影响,计算表达式为
(4)
(5)
(6)
(7)
式中:Gεs为图像空间距离的权重值;εs为距离均衡参数;Gεr为图像像素灰度值的权重;εr为像素均衡参数;Ip和Iq为异物图像坐标点集合S的连续帧灰度值;Wp为异物图像空间距离与灰度的融合归一化因子[10];IBF为经过双边滤波归一化处理后的图像灰度像素值;u、v为图像邻域像素两个方向的灰度值;p、q为连续图像差异像素的空间距离[11]。
3) 异物目标跟踪。由于输电通道导地线位于室外,在风力作用下,缠绕在线路上的异物极有可能发生位移,因此,需要对其进行目标跟踪[12-14]。通过无人机采集获取到的连续帧序列图像,完成预处理后,对异物的位置、姿态、位移和速度等进行连续跟踪,本文采用基于特征跟踪算法来实现[15-16]。通过分析序列图像中异物的运动特征,在不断变化的视频序列中利用相似度函数[17]确定是否为同一异物目标,实现对该异物的连续跟踪。
将路径的航向角α和视点截距d作为跟踪对象,设状态向量A=[α,d,Δα,Δd],Δα和Δd为航向角和视点截距变化量。建立的目标跟踪方程为
(8)
式中:k为第k帧图像处理时序;M为状态转移矩阵;F为观测矩阵;B为观测向量;Lk+1和Pk+1分别为均值为0的高斯白噪声。以此实现对目标的跟踪。
4) 异物检测。完成对异物目标的跟踪后,利用双目视觉理论结合设定阈值确定该异物的三维信息,并对异物与导地线之间的最小距离[18-19]进行计算,以判断其是否会影响线路的正常运行。最小距离计算公式为
(9)
式中,zn为相机高度。按照电力系统相关规定,不同电压等级[20]的安全距离有所不同,具体如表1所示。
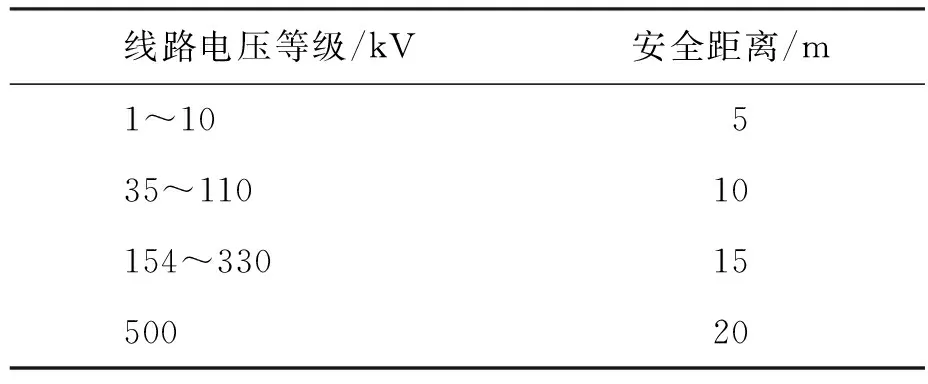
表1 不同电压等级异物与导地线间的安全距离Tab.1 Safe distance between foreign matters and conductor and ground wires at different voltage levels
输电通道交叉跨越段导地线异物三维信息检测具体流程如图2所示。
2 实验设计与研究
为了验证本文方法在实际应用中是否具有合理性,采用路艳巧等[1]提出的基于边缘计算的输电设备异物检测方法和杨剑锋等[2]提出的基于深度学习网络的输电线路异物入侵监测和识别方法为对照方法,设计对比实验。无人机传感摄像头的分辨率数值称为地面分辨率。本文无人机以Canon EOS 5D Mark Ⅱ相机为主,传感器大小为36 mm×24 mm,如将相机像元大小设置为5 616像元×3 744像元时,则地面分辨率为6.4 μm。本文无人机航测遥感系统中,航高的确定跟成图比例尺、像元大小、地面分辨率有关,本文无人机航测遥感系统中数码相机的航高为180 m。
2.1 图像数据扩充
实验数据来自于无人机拍摄的某大型电站输电通道导地线异物缠绕图像,共2 000张,其中,输电线电压值为220 kV,由表1可知,本次实验的异物与导地线之间的安全距离为15 m。缠绕塑料薄膜图像1 000张,缠绕风筝图像500张,缠绕广告篷布图像500张。图像数据集规模的大小直接影响着算法的性能,数据集规模越大,算法所展现出的性能就越优秀,如果数据集规模较小,即使算法整体表现良好,但也会因为数据少而出现过拟合的情况[21-23]。因此,需要对原始图像进行翻转、旋转、缩放等一系列操作,完成原始数据集的扩充。翻转主要采用的是左右翻转,并将原始图像尺寸缩放为400×400像素大小,这样图像就拥有了两种尺寸,也可以验证算法对多尺度图像的适应性。旋转则是对原始图像分别进行20°、100°和220°的逆时针旋转。选取6幅输电线异物图像作为实验样本,如图3所示。

图3 部分实验图像数据Fig.3 Partial data of experimental images
2.2 实验结果及分析
利用本文方法与边缘计算和深度学习算法在导地线异物三维信息检测性能方面进行对比,实验结果如表2所示。

表2 三种算法异物检测结果对比Tab.2 Comparison of detection results of foreign matters for three algorithms
由表2可知,对于6幅包含异物的导地线图像,本文方法均实现了精确检测,没有出现漏检或者多检的情况,检测率最高达到100%。其他两种方法均出现了不同程度的漏检和多检,导致检测率降低。本文方法可以实现精准检测,积极指导工作人员进行异物清理,保障输电线路安全稳定的运行[24]。
从2 000张图片中随机选取600张图片来验证本文方法异物检测的准确率,利用本文方法与边缘计算和深度学习算法在异物检测准确率方面进行对比,实验结果如表3所示。

表3 三种算法异物检测准确率结果对比Tab.3 Comparison of accuracy results of three algorithms for foreign matter detection %
由表3可知,本文方法的检测准确率在98%以上,最高达到100%,而其他两种方法的检测准确率明显低于本文方法。由于本文方法采用双目视觉法确定了异物的具体位置,以此实现对异物的准确检测,因此本文方法的检测准确率更高,性能更好。
3 结束语
为了准确检测导地线的异物信息,使输电线正常运行,本文提出了导地线异物无人机三维信息检测方法;对采集图像进行预处理后,对于运动中的异物目标进行实时跟踪,并判断其三维信息,计算异物与线路之间的安全距离。实验证明本文导地线异物检测方法具有一定的可行性,能够精准检测出输电通道交叉跨越段导地线图像中的各类异物,没有出现漏检或者多检的情况,检测准确率最高达到100%,为电力系统提供了科学的参考方法。
