基于声成像技术的GIS击穿放电点定位方法
2023-12-08田昊洋任茂鑫张今朝
田昊洋, 任茂鑫, 曹 培, 徐 鹏, 张今朝
(1. 国网上海市电力公司 电力科学研究院, 上海 200437; 2. 上海睿深电子科技有限公司 研发部, 上海 200237)
随着我国电网建设及电压等级不断提高,对电气设备的安全性也提出了更高的要求。气体绝缘组合电器(GIS)由于其良好的绝缘性和可靠性在电力系统中获得了广泛的应用[1-2]。但随着运行时间的增加,GIS设备的内部故障也随之增多,对电网的安全、稳定构成了威胁。电气设备投运前的耐压实验是诊断其绝缘水平的重要步骤,实验过程中对设备放电击穿点的准确定位可以迅速判断设备绝缘薄弱位置,从而为后续设备运维和优化设计提供依据[3-4]。
国内外学者基于不同原理和方法对GIS状态监测与放电定位开展了广泛研究[5-7]。熊俊等[8]采用宽频带的等角螺旋天线,利用多次加权的局部放电波形处理技术建立了基于X光机激励的放电定位方法。马飞越等[9]利用特高频时差定位原理和脉冲时延定位方法,研究了GIS支撑绝缘子气隙缺陷的局部放电诊断技术。何宁辉等[10]采用红外测温和超声局部放电检测相结合的方法,研究了GIS内部由于接触不良导致的发热缺陷。周电波等[11]通过分析GIS放电产生的超声波时域和相位分布特征,基于小波时频定位技术实现对局部放电检测的准确定位。刘媛等[12]采用振动加速度传感器研究了由于机械振动导致的GIS缺陷,实现了对振动信号的监测与定位。
目前关于GIS故障定位的研究多是采用超声波、特高频、振动监测等技术手段[13-16]。常规的监测方法大多需要使用接触式信号传感器,因此运行和维护成本较高,且难以实现对设备的全局监测[17-18]。而GIS内部由于存在毛刺等原因造成击穿放电,将严重威胁设备运行的安全、稳定性。本文研究了声成像技术在GIS击穿放电点定位中的应用,将可控响应功率的波束形成技术和相位变换相结合,利用非接触式声传感器阵列,通过检测GIS放电产生的振动信号实现对击穿放电点的定位。
1 声成像技术
GIS或电气设备内部发生放电或击穿时,会造成周围空气的振动,振动信号传播过程中形成了声学波束。利用基于传感器阵列的声成像仪采集这种具有声源特征的声波信息,并对其进行声学分析即可得到声源位置以及振动信号的时域、频域特征。在此基础上融合可见光图像从而形成兼有声学和光学信息的多信息图像,可实现对电气设备内部振动或异常放电点的定位与声学成像。
声学成像技术对GIS内部击穿放电点定位的核心问题在于检测放电产生的振动信号,并对其进行分析和处理,从而得到声源位置的坐标信息。目前,广泛使用的声源定位方法包括到达时间差法、高分辨率谱估计法和可控响应功率法。
1.1 波束形成
针对GIS击穿放电点的声源定位问题,假设用于检测振动信号的声传感器阵列共有N个阵元,则第i个麦克风接收到的信号为
xi(t)=hi(t)s(t)+βi(t)
(1)
式中:s(t)为击穿放电点的声源信号;hi(t)为声源到麦克风的脉冲响应;hi(t)s(t)为混响信号;βi(t)为噪声信号。
电气设备位于室内时,混响条件下的室内脉冲响应hi(t)可表示为
hi(t)=αis(t-Δti)+h′i(t)
(2)
式中:αis(t-Δti)为声源直达麦克风的振动信号;αi为声音信号的衰减因子;Δti为从声源位置到第i个麦克风位置的时延;h′i(t)为声音信号在室内的反射信号。
将式(1)代入式(2),即可得到单个麦克风接收到的声音信号为
xi(t)=αis(t-Δti)+h′i(t)s(t)+βi(t)
(3)
定义输出信号为y(t)
(4)
式中,τi为附加延时。
以声音到达麦克风阵列的最大传播延时作为参考信号,则每个麦克风的附加延时为
τi=Δt0-Δti
(5)
式中,Δt0为声音到达参考位置的传播延时。
(6)
1.2 可控响应功率


(7)
附加时延被用于控制波束形成的焦点,当波束形成的焦点与声源的位置相同时,可控响应的功率达到最大值,从而实现对声源的定位。可控响应通常是时延的函数,对于每个可能的声源位置用向量r表示,则该位置可控响应功率P为
P(r)=P(τ1,τ2,…,τN)
(8)
若某个候选位置对应的可控响应功率最大,则认为该候选位置就是声源的位置。基于上述原理,即可实现对声源的定位。
1.3 相位变换
令频域内的麦克风信号输出为
(9)
式中:Xi(ω)为麦克风接收到信号xi(t)的傅里叶变换;Gi(ω)为时域滤波器的傅里叶变换。
基于相位变换的广义互相关函数(generalized cross correlation of phase transform,GCC-PHAT)具有较强的抗干扰性,因此可以通过将所有可能的阵元对的GCC-PHAT相加来求得可控响应功率,即可实现可控响应功率与相位变换相结合。
第m和第n个麦克风信号的广义互相关函数可表示为
(10)
相位变换(PHAT)权函数定义为
(11)
且存在
(12)
则可将所有麦克风的滤波器定义为
(13)
(14)
(15)
同理,对所有可能的空间位置进行搜索,使得P(r)取得最大值的位置即为声源位置。SRP-PHAT声源定位方法与延迟求和的波束形成方法相比,突出了真正的峰值,且具有更强的抗噪性和抗混响能力,提高了定位算法在强噪声和强混响环境下的鲁棒性。
2 实验结果分析
2.1 实验布置
为了对本文算法进行验证,在高压实验室进行了GIS击穿定位模拟实验。本文采用差分进化算法对传感器阵列进行了优化设计,最终得到了由64个声传感器组成的传感器阵列,其中麦克风排布形式为3个圆环组成的同心圆,各圆环上的阵元数目为18、24、24,圆环半径分别为0.045 5、0.098 5及0.155 m。麦克风工作频率范围为10 Hz~24 kHz,有效成像频段为800~24 000 Hz,有效测量距离为0.1~100 m。传感器阵列及其响应图谱如图1所示。

图1 传感器阵列及其响应图谱Fig.1 Sensor array and its response spectrum
本文通过人为设置击穿放电点的方式,利用声成像技术对其进行定位验证。图2为实验装置现场布置图;图3为GIS装置俯视图,以A点为坐标原点构建坐标系,传感器阵列位于A点,距离地面高度1.5 m,A点坐标为(0 m,0 m,1.5 m)。采用在GIS内部固定位置安装突出铁丝的方式设置故障点,为验证传感器阵列对不同位置放电的定位效果,分别设置放电点F1(4.50 m,5.00 m,1.70 m)、F2(4.50m,5.00 m,2.20 m)、F3(3.45 m,6.00 m,1.70 m)、F4(5.55 m,6.50 m,1.70m)。

图2 实验设备及放电定位示意图Fig.2 Test equipment and schematic diagram of discharge location

图3 GIS设备俯视图Fig.3 Top view of GIS equipment
实验过程中通过加压设备给母线加压,使故障点的铁丝发生击穿放电。利用传感器阵列进行持续采样,记录放电前后8 s内的声波信号数据。通过仪器的自定义算法模块分别采用编写好的SRP和SRP-PHAT定位算法对放电点进行定位分析。
2.2 算法对比分析
2.2.1 定位误差实验
为了对比两种算法对于击穿放电点的定位精度,本文将故障点设置在F1位置,传感器布置于A点,从而进行击穿放电实验。图4a、b分别为利用SRP和SRP-PHAT声成像算法的定位云图,两种算法均能实现对GIS内部击穿放电点的定位。但SRP算法给出的声纹图像定位区域要明显大于SRP-PHAT算法所得到的声纹图像定位区域。
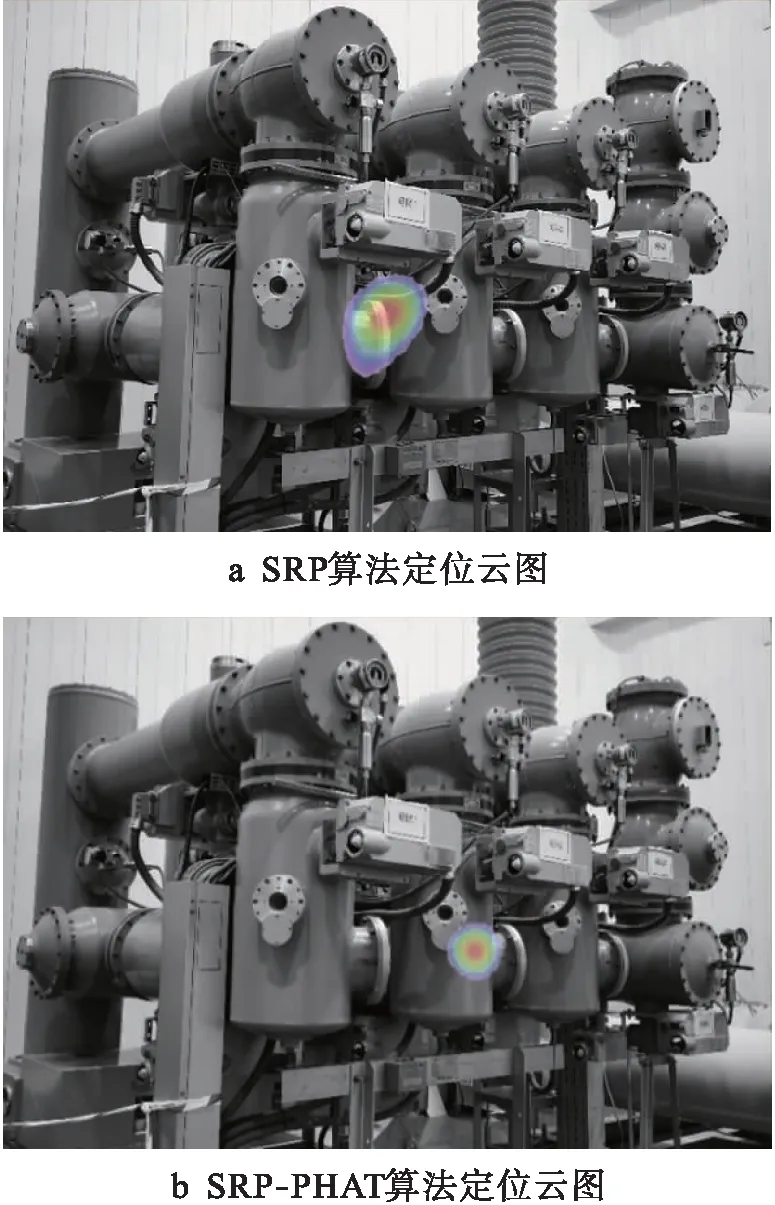
图4 声成像算法定位云图Fig.4 Location nephogram of acoustic imaging algorithm
为了进一步对比两种算法的定位效果,在同一位置(F1)进行10次放电实验以及GIS击穿点定位误差比较,对误差进行归一化处理。两种算法对击穿放电点的定位误差如图5所示。其中x轴的定位误差可表示为

图5 放电定位实验结果Fig.5 Experimental results of discharge location
(16)
式中:x0为故障点位置坐标;x′为经过处理后的定位坐标。ey和ez的计算方法同理,综合定位误差取3个坐标误差的平均值。
由实验结果可知,SRP对GIS击穿点定位的x轴、y轴和z轴定位误差平均值分别为6.91%、7.21%、7.31%,综合误差平均值为7.14%;SRP-PHAT对GIS击穿点定位的x轴、y轴和z轴定位误差平均值分别为5.06%、4.51%、4.80%,综合误差平均值为4.79%。SRP-PHAT的定位精度要比SRP定位精度高约2.35%,且误差的标准差要小于SRP定位误差的标准差。由此说明SRP-PHAT的定位误差波动性小,其定位鲁棒性要优于SRP定位方法。
2.2.2 响应速度实验
本文对两种算法的响应速度进行分析,将故障点设置在F3位置,在A点布置两台相同的传感器阵列进行实验。实际加压过程中,GIS发生击穿放电的时刻不可控,本文在GIS本体上安装一个特高频传感器作为放电脉冲的接收装置,用于记录放电的起始时刻,然后将计算得到的能量峰值时刻作为响应时间,进行10次击穿放电实验,实验结果如图6所示。
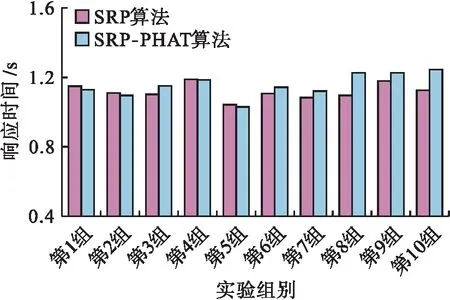
图6 响应速度实验结果Fig.6 Experimental results of response speed
由实验结果可知,SRP算法的平均响应时间约为1.117 s,SRP-PHAT算法的平均响应时间约为1.145 s,在本文实验条件下SRP-PHAT的运算速度约为SRP算法速度的102.4%,即优化后的算法要略慢于优化前的算法。分析上述原因,相比于SRP算法,SRP-PHAT运算过程中引入了相位变换和加权滤波的过程,导致了计算时间的增加。在实际应用过程中检修人员更关注定位精度,因此在运算时间差别不大的情况下,本文算法具有更好的抗干扰能力和定位精度。
2.3 定位应用分析
2.2.1节中分析了传感器阵列位于A点时的定位精度,为了验证传感器位于不同位置情况下SRP-PHAT算法的定位效果,本文设置故障点为F1点,将传感器阵列分别放置在图3中的B、C、D点重复进行10次击穿放电定位实验。图7为传感器位于不同位置放电点的典型声成像定位云图。图8为传感器阵列位于B、C、D点时的击穿放电定位误差。
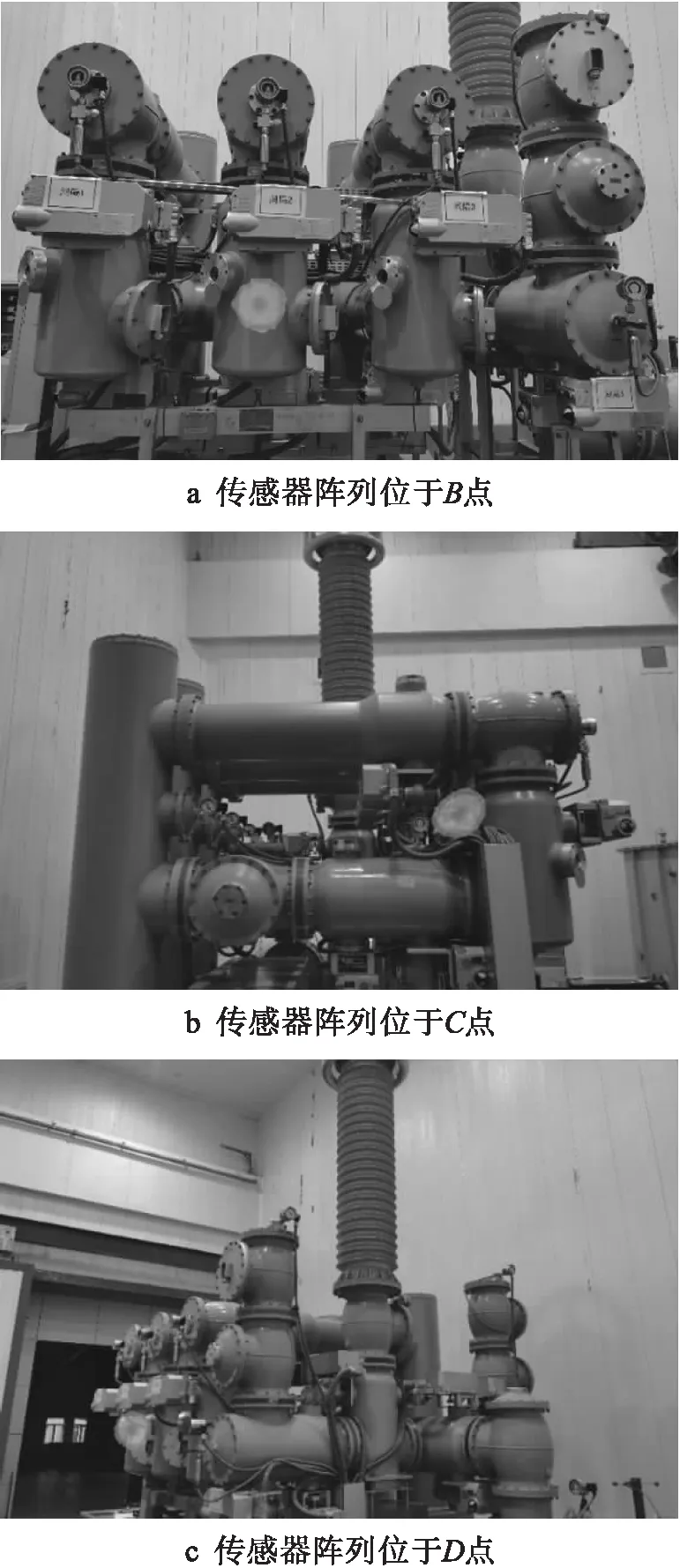
图7 传感器位于不同位置时的定位云图Fig.7 Location nephogram of sensor at different positions

图8 传感器处于不同位置定位误差Fig.8 Location error of sensor at different positions
由实验结果可知,传感器阵列位于B点时,击穿放电点的定位误差平均值为4.21%;传感器位于C点定位误差平均值为4.30%;传感器位于D点定位误差平均值为4.49%。传感器阵列位于不同位置时,采用SRP-PHAT算法均可实现对GIS击穿放电点的定位,其定位误差均小于5%,定位精度大于95%,显著提高了对GIS内部击穿放电点的定位效果。
3 结 论
本文研究了基于波束形成技术声成像在GIS击穿定位中的应用,主要结论如下:
1) 将可控响应功率的波束形成算法与相位变换相结合进行GIS击穿的声成像定位,具有更高的定位精度与更优的抗噪性。
2) SRP方法对GIS击穿点定位的综合定位误差约为7.14%;SRP-PHAT方法的综合定位误差约为4.79%,且SRP-PHAT的定位方法具有更高的鲁棒性。
3) 击穿放电点位置和传感器位置均不固定的情况下,采用SRP-PHAT定位方法得到的GIS击穿放电点定位误差的平均值约为4.57%,定位精度高于95%。
