应用在自动门上的直线电机控制系统设计
2023-12-08鞠振宇
鞠振宇
(安徽理工大学 电气与信息工程学院,安徽淮南,232001)
0 引言
随着现代社会的快速进步,经济和科学技术得到了质的提高。因此,越来越多的高档场所如酒店、商场、银行等,在他们的入口处采用更加方便、美观、智能的自动门控制系统。
据《纽约时报》的记载,最早的自动门是由美国的史丹利公司于1930 年推出的,当时由于受技术的限制,那个年代的自动门是由油压、空压进行驱动的,运行效果与运行效率都不太好。然而随着后面电气控制技术的发展,电力电子与电机控制技术越来越成熟,于是便出现了采用电机驱动的自动门,运行效果与运行效率得到了很大的提升。
目前市场上大部分的自动门控制系统,基本结构都是由旋转电机、减速器、传动装置所组成,通过减速器把旋转电机的转速减小,转矩增大,再由传动装置把电机的旋转运动转化为自动门所需要的直线运动,进而驱动门体进行开门与关门动作。但是其存在一些无法避免的缺点:旋转电机、减速器和传动装置占用空间较大,需要预留足够的空间才能安装;由于机械传动装置的存在,不可避免地出现机械结构相互碰撞、摩擦产生的噪声,和带来的能量损失的问题。
本文设计了一种应用在自动门上的直线电机控制系统。因为直线电机可以直接产生直线运动,避免了旋转电机由旋转到直线的转化过程,减少了减速器和传动装置,所以由直线电机驱动的自动门的效率更高,噪音更小,占用的额外空间更少。
1 系统整体设计
本方案设计的控制系统以ST 公司的STM32F446RET6单片机为控制核心,来实现自动门的开门、关门的功能。该控制系统主要由单片机电路、电源电路、磁耦隔离电路、驱动逆变电路、电流采样电路和霍尔传感器组成。具体结构框图如图1 所示。由外部直流24V 电源输入给电源电路,电源电路可以分别产成+3.3V、+5V、+12V 电压,给系统中的其他部分电路提供合适稳定的电压;利用电流采样电路采集永磁同步直线电机的三相电流,传输给单片机的ADC 接口对电机电流进行实时处理;然后STM32F446RET6 单片机通过计算,生成六路SVPWM 信号输入给磁耦隔离电路,再由磁耦隔离电路输入给驱动电路,驱动电路再通过逆变电路驱动永磁同步直线电机动作。

图1 系统结构框图
2 硬件电路设计
■2.1 电源电路
该控制系统的电源电路设计如图2 所示。其中包含了+5V 供电电路,+3.3V 供电电路和+12V 供电电路,满足了该系统所用电子元器件的所有供电需求,保证了系统的稳定性。
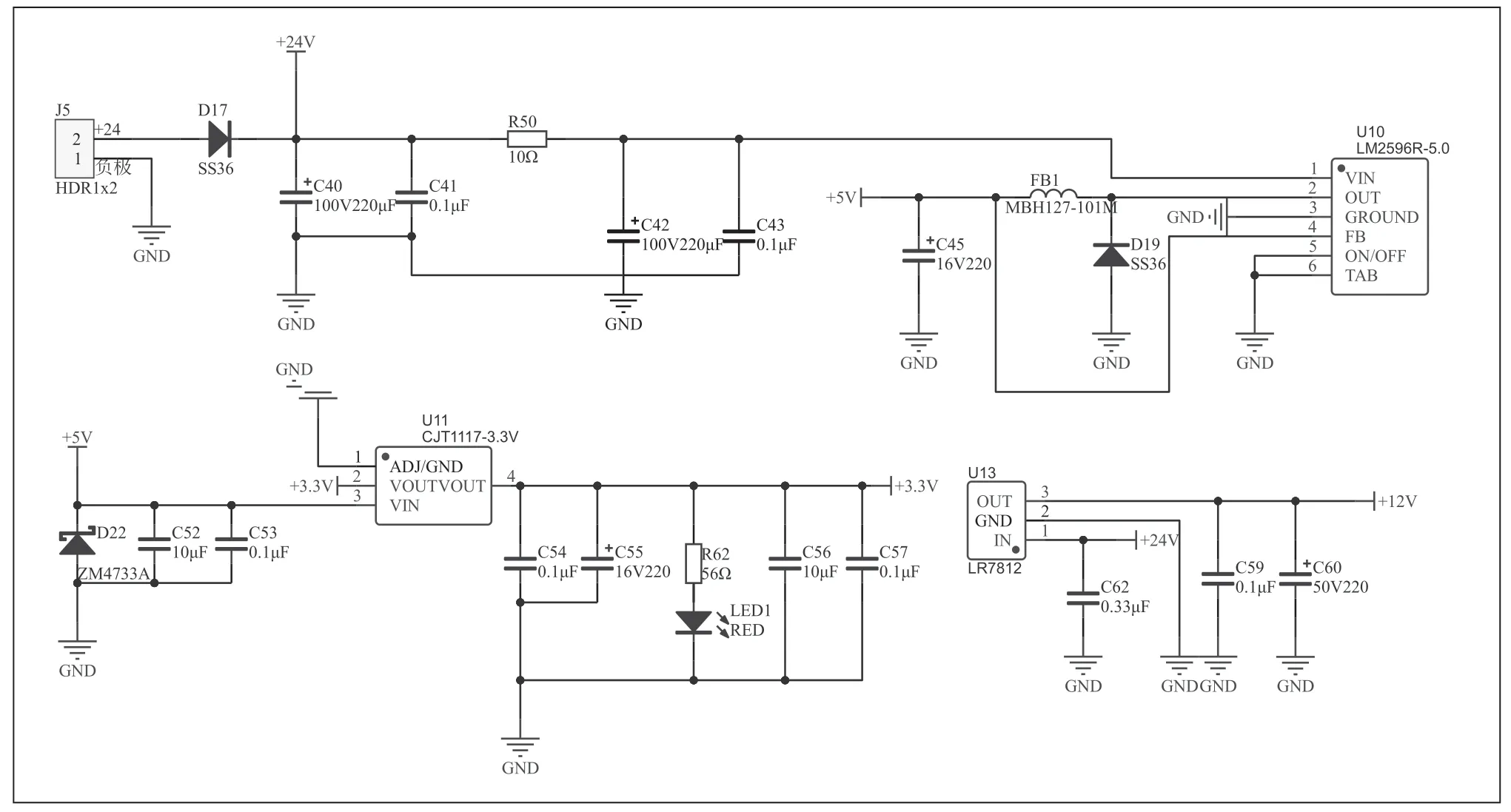
图2 电源电路原理图
该自动门控制系统由外部+24V 电源供电,+24V 电压通过电源接口接入电路,利用SS36 二极管限制其电流的方向,由220μF 的电解电容和0.1μF 的贴片陶瓷电容进行滤波处理之后输入给+5V 电源芯片,再由+5V 电源芯片输出+5V电压,输出的+5V电压再给+3.3V电源芯片,使其输出+3.3V 电压。
+5V 电源芯片我们采用的是德州仪器生产的LM2596R-5.0 芯片,该芯片为DC-DC 开关型电压调节器,最大输出电流为3A,转换效率高达70%~90%,当它的ON/OFF 引脚为低电平时,此芯片开始工作,同时产生一个1.235V 的参考电压,用来和反馈电压进行比较,进而实现稳压。FB 引脚接在电路的输出端,通过输出端的反馈电压与基准电压1.235V 进行比较,从而检测输出电压是否偏离所需电压,进而对芯片进行相应的稳压控制。虽然该芯片已经问世很长时间了,但是其热度一直没有减少,因为他使用方便,性能稳定,现如今在很多场合仍然有很多人在使用该芯片;+3.3V 电源芯片我们采用的是江苏长晶科技股份有限公司生产的CJT1117-3.3V 电源芯片,该芯片为低压降线性稳压器,输入5V 电压,输出3.3V 电压,最大输出电流为1A。其价格低廉,外围电路简单,使用方便;+12V 电源芯片我们采用的是乐山无线电生产的LR7812 电源芯片,该芯片为3 端1A 正压调节器,输入24V,输出12V。
■2.2 主控芯片电路
该控制系统的控制核心采用的是意法半导体生产的STM32F446RET6 处理器,STM32F446 集成了ARM Cortex-M4 内核,采用了90nm 的非易 失性存储器(NonVolatile Memory)技术和自适应实时存储器加速器(Adaptive Real-Time MemoryAccelerator)技术,使程序零等待运行,可以充分发挥出Cortex-M4 的性能。Flash容量为512KB,主频最高为180MHz。
图3 为STM32F446RET6 处理器的最小系统原理图。

图3 STM32F446RET6 最小系统原理图
■2.3 磁耦隔离电路
为了防止电路故障时,电机驱动电路的大电流损害单片机,我们在单片机与电机驱动电路中间加入了磁耦隔离电路。我们采用的是德州仪器生产的SN74HC244N 缓冲器,该缓冲器是一款三态八路正向缓冲器,它具有两个输出使能端:1OE 与2OE,通过控制1OE 与2OE 端口上高低电平的变化,就可以自主选择要导通的通道。当1OE 与2OE 的选通工作信号为低电平时,该缓冲器的输出端Y 和输入端A状态相同;当1OE 与2OE 的选通工作信号为高电平时,输出呈现高阻态。
图4 为SN74HC244N 缓冲器电路的原理图。
■2.4 驱动逆变电路
单片机输出的SVPWM 信号经过磁耦隔离电路后,传输到电机驱动芯片上,来控制MOS 管的关断驱动电机。我们采用的是英飞凌公司生产的IRS2003STRPBF 电机驱动芯片,该驱动芯片是一个高压、高速功率的MOSFET 和IGBT驱动器,具有可靠的高侧和低侧参考输出通道,供电电压为10~20V,高压侧电压最大值可达200V。MOS 管我们采用的是无锡新洁能公司生产的NCEP85T12 场效应管,该MOS 管为N 沟道电力MOS 场效晶体管,漏极与源极之间所能承受的最大电压值为85V,可承受120A 的大电流,完全保障了使用要求。
图5 为IRS2003STRPBF 电机驱动芯片与NCEP85T12场效应管所搭建的半桥电路原理图。
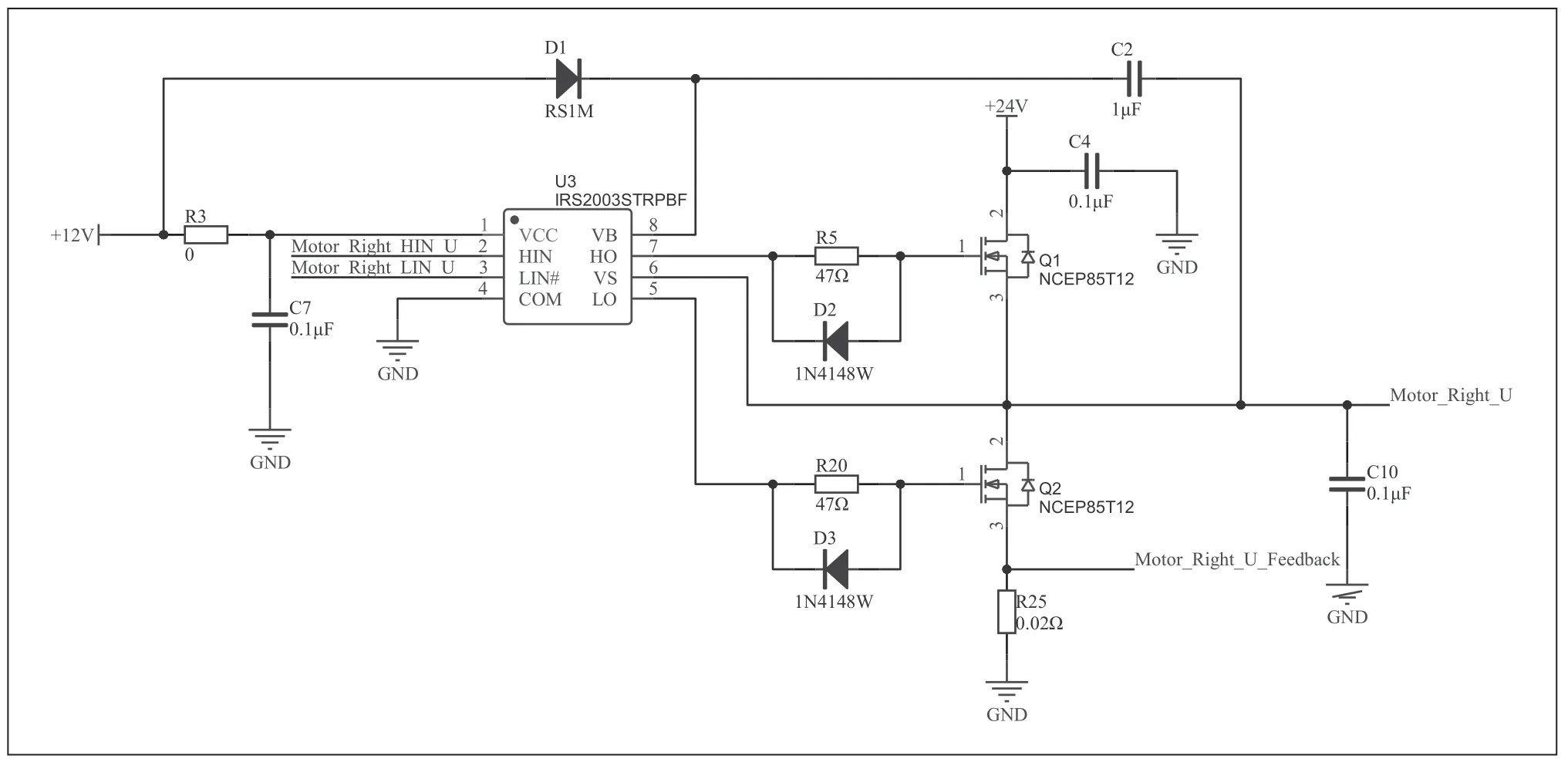
图5 驱动逆变电路原理图
■2.5 采样放大电路
为了使电机运行更加地可靠,运行得更加平稳,我们需要对电机运行电流进行采样,从而实现闭环控制。我们采用精密电阻采样,把精密电阻串联在下桥臂的源极与地之间,通过运算放大电路放大精密电阻上的电压信号,传输给单片机进行运算处理,得到流经采样电阻上的电流值。运算放大器我们采用的是德州仪器生产的LMV358AIDR 双通道运算放大器芯片,输入电压范围为0~6V,增益带宽为1MHz。通过配置外围电路,形成单极低通滤波器。运算放大倍数公式为:
式中:RF为反馈电阻;RG为反向输入端到地之间的电阻;R1为输入信号到正向输入端之间的电阻;C1为正向输入端与地之间的电容。
截止频率计算公式为:
本运放电路的放大倍数通过以上公式计算得出为63倍,截止频率为37kHz,满足使用要求。图6 为采用LMV358AIDR 芯片的运放电路原理图。
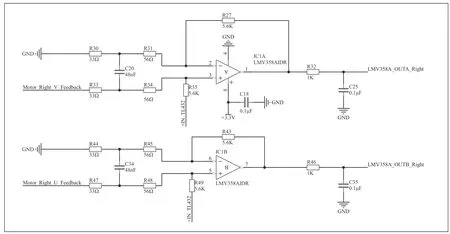
图6 运算放大电路原理图
3 软件设计
该控制系统利用Keil5 为软件开发平台,编写了整个控制系统的控制代码,控制代码采用C 语言进行编写,语法清晰,结构简单,便于开发与后期的调试。采用了STM32标准库进行开发,使用方便,可读性比较好,便于理解。我们采用了FOC(Field-Oriented Control)矢量控制算法,来控制永磁同步直线电机。FOC 矢量控制算法是通过控制磁场的大小和方向来进一步控制电机,从而实现平稳地转矩、低噪音、高效率和高速动态响应。程序主要分为两个部分:主函数部分和中断部分。
■3.1 主函数
主函数主要初始化各个模块,配置好时钟、定时器、ADC 与UART 的初始化状态,并给一些基本的变量赋初始值,保证后面程序的运行。程序开始运行,先对串口进行初始化,配置其波特率为115200,再对霍尔传感器、磁耦隔离、ADC、LED、定时器和中断进行配置,设置ADC 中断的抢占优先级与响应优先级都为0,之后给电流环PID 参数和Id_ref、Iq_ref 赋初值,再把定时器使能打开,进入while(1)循环,在里面执行LED 灯闪烁,在程序运行的时候来判断程序是否正常运行。其主函数的程序流程图如图7所示。

图7 主函数程序流程图
■3.2 中断函数
中断函数是该控制系统的主要部分,中断函数为外部触发中断,主要包含了FOC 矢量控制算法所需变量的赋值与FOC矢量控制算法所需的各种变换。程序开始,判断ADC 注入通道是否有上升沿触发,当有上升沿触发时进入中断函数,否则,不进入中断函数。进入中断函数以后,采集电机的三相电流和电机的角度,通过CLARK 变换,将三相电流Ia、Ib、Ic转化为两相Iα、Iβ,对Iα、Iβ做Park 变换,得到Id、Iq,与Id_ref、Iq_ref 作差,经过PID 控制器使Id、Iq最终达到设置的Id_ref、Iq_ref,然后通过反park 变换把直流信息转化为交流信息用于SVPWM 的输入,最后通过SVPWM 计算驱动电机。中断函数的程序流程图如图8 所示。

图8 中断流程图
■3.3 控制算法
本永磁同步直线电机控制系统采用的是FOC 矢量控制算法,是目前永磁同步直线电机(PMLSM)高效控制的最优方法之一。
FOC 矢量控制算法结构框图如图9 所示。

图9 FOC 矢量控制算法结构框图
首先,我们采集三相电流,在实际应用中,为了节约成本,我们采集两相电流即可,第三相电流通过公式(3)基尔霍夫电流定律(KCL)来计算,该定律规定在任意时刻,流入一个节点的电流之和恒等于流出该节点的电流之和。基尔霍夫电流定律公式如下:
我们采集到的三相电流Ia、Ib、Ic基本上就是三个相位相差120 度的正弦波,经过Clarke 变换后将这三个非正交的基向量,正交化为一个直角坐标系,这个新的直角坐标系我们把它命名为α—β 坐标系。变换公式如下:
之后我们将Iα、Iβ进行线性化,我们通过作Clark 变换,将α-β 坐标系旋转θ 度,其中θ 是转子当前的角度。得到Id、Iq。Clark 变换公式如下:
Id、Iq为直流量,这时我们就可以采用控制直流电机的方式来控制永磁同步直线电机,我们采用的是工业界偏爱的PID 控制,这里我们只需要用PI 就可以满足要求。
我们将反馈量Id、Iq与设定值Id_ref、Iq_ref 进行求差,输入到PI 控制器中,得到Ud、Uq,再进行反Park 变换,得到两个相位相差90°的正弦量Uα、Uβ。反Park变换公式如下:
最后,把得到的Uα、Uβ通过SVPWM 调制,生成SVPWM 信号控制逆变桥,来驱动永磁同步电机。这时,就完成了FOC 控制的整个流程。
4 实验
最后,需要通过实验来检验我们的硬件电路和控制程序是否正确。把设计的电机驱动电路板与永磁同步直线电机连接好,将程序通过下载器下载到电路板上,给电路板通上直流24V 电源,打开开关,驱动直线电机的运行。将示波器的探头接到电路板驱动信号输出端,监测电机驱动电路板输出给电机的波形。波形如图10 所示。
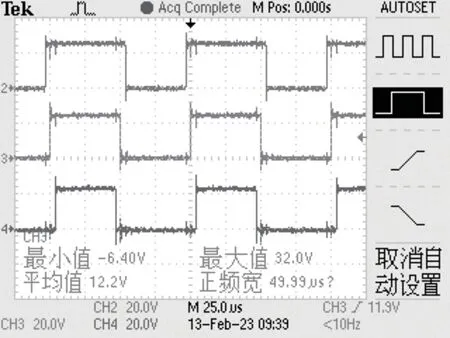
图10 驱动信号波形图
5 结论
本文针对自动门在实际应用中的需求,提出了一种新型的基于永磁同步直线电机的自动门控制系统,论述了该自动门控制系统的组成及其各部分的原理,设计并完成了永磁同步直线电机控制系统的硬件电路设计和控制软件的编写,对自动门控制系统未来的设计与开发使用具有一定的指导意义,提供了一定的参考价值。
