木地板码垛机器人真空吸附控制系统设计
2023-12-06彭仁杰吴佳伟程广振
彭仁杰,吴佳伟,程广振
(湖州师范学院 工学院,浙江 湖州 313000)
0 引 言
传统木地板行业的生产技术较低,产品同质化严重,企业创新意识与创新能力不足[1].近些年,我国木地板行业专利的申请数量保持较快增长,说明该行业对技术创新的投入越来越多[2].末端处理器[3-4]作为机器人的核心部件,不仅影响机器人的堆垛效率,还关系到机器人能否实现稳定安全堆垛的前提.牛铭[5]等对木板码垛机进行研究,得出一种以真空泵为动力源的海绵式真空吸附装置.此装置虽然能够处理重量为20 kg且堆放宽度超过2 m的木板,但不适用于轻薄、窄边木地板的上料过程.王瑞[6]等为解决生产线对宽度多变的薄板搬运问题,设计一种电磁吸盘式末端处理器.此处理器虽然可实现不同规格形状薄板的抓取,但不适合多块薄板排列的抓取.
木地板加工流水线的始端引入木地板码垛机进行自动码垛,需要码垛的木地板表面较平整,且单块质量最大为1.2 kg,在具备成熟的压缩空气使用条件下,采用真空发生器产生吸附力是最好的选择.但控制多个真空发生器产生吸附力需要消耗大量的压缩空气,在应用于多变的木地板堆放方式下,存在压缩空气浪费现象.针对压缩空气的使用效率,本文设计一种木地板吸附控制系统,通过控制吸盘的使用数量,实现对压缩空气的有效利用,以降低码垛成本,提高设备的使用寿命.
1 木地板码垛机末端吸附装置结构
吸盘自动控制系统的机械结构主要由红外测距传感器和真空吸附装置组成.红外测距传感器安装于木地板堆放的载物台两侧,用于检测木地板堆放的位置和宽度.末端吸附装置由真空吸附气路和吸盘固定支架组成.真空吸附气路主要由气源、电磁阀、真空发生器和吸盘组成,气路结构见图1.
末端吸附装置与载物台通过Solidworks建立三维模型,见图2.木地板宽度为100~200 mm,堆放宽度为100~800 mm,载物台宽度为800 mm.控制系统设计的工艺参数见表1.
红外测距传感器采用SHARR公司生产的GP2Y0A021YK0F,其有效探测距离为100~800 mm,工作电压为4.5~5.5 V,输出为模拟电压,标准电流消耗为33~50 mA.控制系统选用三菱公司生产的FX3U-48MR,将模拟量输入模块FX3U-4AD作为控制中心,以满足2个模拟量的信号输入和I/O点数的要求.控制系统框图见图3.

图1 真空吸附气路图
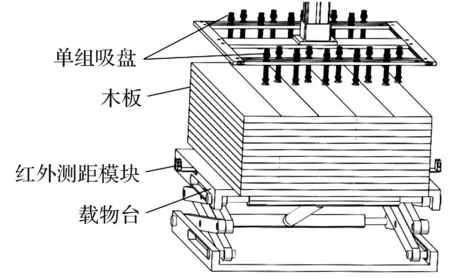
图2 末端吸附装置机械结构图
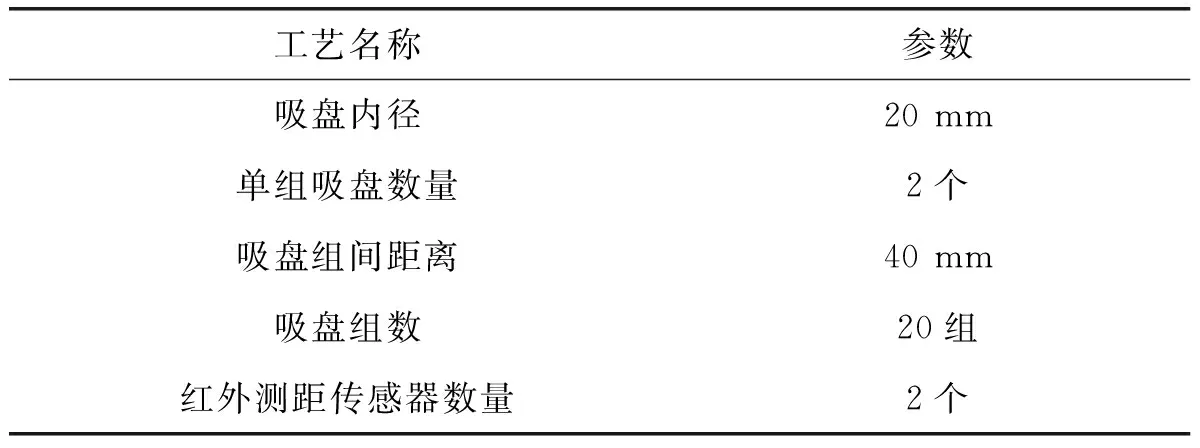
表1 工艺参数要求

图3 控制系统框图
2 控制系统设计
2.1 红外测距模块信号处理
根据红外测距传感器的工作原理[7],所测距离与输出电压之间的特性呈非线性关系,因此需对测距程序进行非线性校正.在100~800 mm距离范围内,实验测得每间隔50 mm的GP2Y0A021YK0F输出电压数据为50次.求平均值,得到电压与实测距离的关系,见表2.在Matlab软件上,使用最小二乘法进行不同阶次的曲线拟合[8],拟合多项式的拟合水平由低次至高次逐渐提升.本文直接对高次拟合多项式进行分析.高次拟合曲线见图4,6~8次拟合函数的拟合优度检验参数结果见表3.拟合函数误差最大值影响PLC通过吸盘间距设计控制程序,当误差最大值超过吸盘内径时,则会出现漏吸问题.不同阶次拟合曲线的绝对误差数据变化见图5.
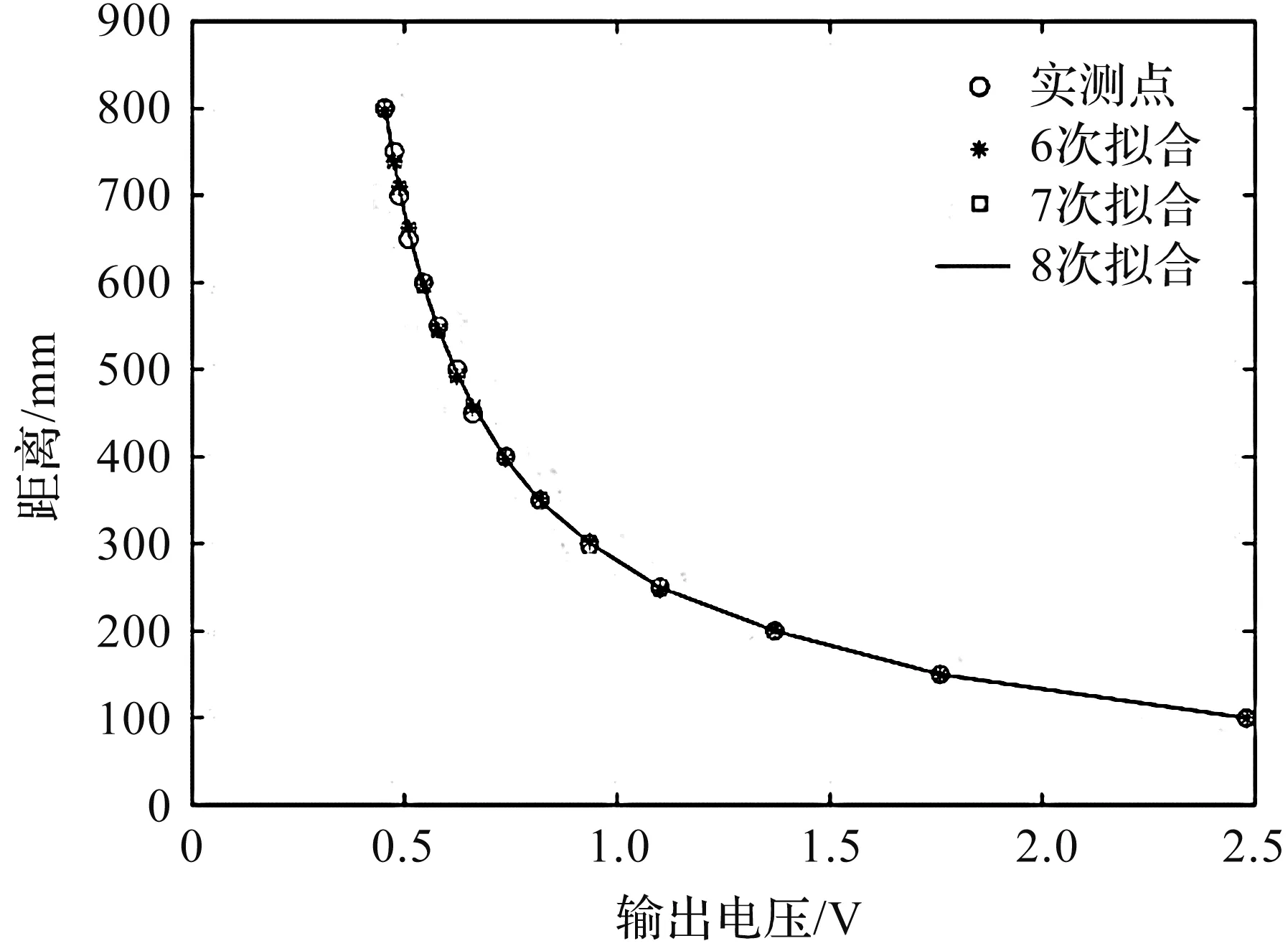
图4 拟合曲线

图5 不同拟合水平曲线的最大绝对误差数据变化
6~8次拟合水平的数学模型为:
6次拟合函数:L=1 232x6-10 001x5+32 562x4-54 792x3+50 842x2-25 288x+5 724.
7次拟合函数:L=-3 130x7+27 800x6-101 950x5+200 610x4-230 070x3+155 240x2-58 200x+9 970.
8次拟合函数:L=1.0×106×(0.013 3x8-0.126x7+0.504 1x6-1.111 4x5+1.482 2x4-1.229 3x3+0.623 1x2-0.178 7x+0.023).

图6 系统的控制流程
由表3可知,7~8次函数拟合的效果较好,误差水平较接近.由图4可知,3种拟合水平的效果十分接近.由图5可知,6~8次拟合函数的绝对误差接近10 mm,7次拟合函数的误差最低.因此,本文选择7次拟合函数作为“电压-距离”转换公式.
2.2 控制系统程序设计
利用红外测距传感器控制吸附装置的工作流程为:将木地板堆放在载物台;开启吸附装置,红外传感模块将距离检测后的模拟电压传入PLC;PLC计算并控制对应的真空电磁阀开启,吸附木地板.在编写自动控制程序之前,根据技术要求和工艺流程,绘制控制系统框,见图6.
采用GX Works 2编写的控制程序主要分为2个部分:①编辑Matlab拟合的多项式,对2个电压输入模拟量进行换算;②结合吸盘布置和换算结果编写吸盘控制程序.PLC数据寄存器最多能储存小数点后的6位,若直接采用Matlab导出的保留6位小数的拟合多项式,则会扩大PLC的计算误差,因此需要对部分系数进行转化.“电压-距离”数据转换部分的程序见图7.吸附装置设置的吸盘间距为40 mm,结合模拟量转换结果,其真空吸附控制部分程序见图8.
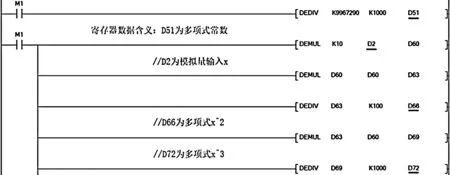
图7 模拟量数据处理程序
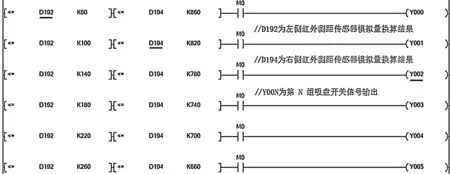
图8 真空吸附控制程序
2.3 程序仿真
验证红外测距传感器传入PLC的模拟电压,将其转换成精确的距离数值[9],使每个距离数值误差都在1 mm以下.输入原实验测量电压,得出计算后的距离数值,并与拟合函数的拟合距离比对,结果见表4.

表4 数据处理结果
GT Designer 3不仅支持各种相关可编程控制器的通信,还支持离线模拟,并可根据编辑的CPU不同进行快速编辑,以完成模拟.采用GT Designer 3编辑末端吸附装置监控控制界面,将各软元件关联PLC地址与GX Works2进行联合仿真.仿真效果为以输入模拟量的大小来控制气动电磁阀(灯亮为启动).仿真结果见图9.

图9 仿真结果
3 结 语
为提高真空吸附装置的吸附效率和压缩空气的利用效率,设计一种通过检测木地板堆放宽度启闭末端吸附装置吸盘数量的控制系统.首先,根据木地板的详细数据计算吸盘内径和单组吸盘数量,并通过Solidworks建立末端吸附装置与载物台的空间模型;其次,根据红外测距传感器的检测原理设计实验,通过最小二乘曲线拟合法,对实验数据进行不同阶次的多项式拟合,并通过分析确定将7次多项式作为距离测量的数学模型,以满足设计要求;最后,结合拟合多项式和吸盘布置距离,使用GX works 2软件编辑控制程序.GT Designer 3和GX works 2的仿真实验结果说明,红外测距传感器输入的模拟量能够准确地控制每组吸盘的启闭,从而提高压缩空气的使用效率.