一种温湿度检定箱PID参数整定及优化方法
2023-12-05朱朔君上海飞机制造有些公司
朱朔君 / 上海飞机制造有些公司
0 引言
温湿度检定箱作为温湿度计校准的重要设备,在工业、科研和质检等领域扮演着重要角色。然而,随着使用时间过长、温场模型发生变化、使用期间元器件的逐步替换,温湿度检定箱的温控和湿控能力会逐渐下降,导致稳定时间延长、无法达到预定的检定点,或振荡幅度逐渐扩大等问题产生。目前,行业内通常采用棉签蘸无水乙醇或丙酮擦拭镜面,然后用干净棉签擦拭露点传感器,以此减小控温装置的综合误差;或者清洁箱体右侧下部散热器的灰尘,以达到最佳换热效率;此外,校准时,把传感器探头放置在接近温湿度检定箱工作的中心区域,或者将箱体内用于放置被测温湿度记录仪的搁架板置换成大网格,以减小角落与中心点的温度差值,但这些方法的效果有限,无法显著缩短稳定时间。
本文涉及的温湿度检定箱控制系统采用的工作方式是先恒定空气加热器的增益输出,使系统进入一个恒定范围,然后通过积分和微分的调节来改变空气加热器的输出值,使得系统更加趋于稳定,从而实现控温。由于该温湿度检定箱具备了微处理可编程控制模块,开放了可调节PID 参数的接口,可通过调整温湿度检定箱中的比例积分微分(Proportion Integration Differentiation,PID)参数,来加快温湿度检定箱的温湿度稳定时间。目前,国内的研究主要集中在“点位”控制方面,PID 控制器的参数整定也大多侧重于传统的工程经验[1]。基于对温湿度检定箱控温系统的分析,提出了一种具体可行的PID参数调整方法,以缩短温湿度检定箱的稳定时间和提高其准确度。该方法对于具备PID 输入接口的温湿度检定箱,具有一定的普适性。
1 PID控制
PID 控制是根据被控系统误差等特性利用比例、积分、微分计算出控制量,从而实现对控制系统的调控。PID 控制在当代工业领域使用率约为91.3%,而现代控制理论的控制方法只有1.5%[2]。其控制鲁棒性较强,对于诸如温度控制系统这类线性定常系统的控制非常有效。PID 控制框图如图1 所示[3]。

图1 PID 控制框图
比例作用是依据偏差的大小成比例地调整控制器的输出与输入误差信号的比例关系,从而产生减少系统设定值与实际输出值之间偏差的控制作用[4]。比例有时又被称为增益,用Gain 表示。积分作用可消除稳态误差。积分项的误差由时间的积分决定,随着时间的推进,积分项误差逐渐增大。在进行调参时,可以先设定一个较大的积分时间常数Ti的初值,随后渐渐减小Ti,直到自动控制系统开始出现振荡以后,反向操作,加大Ti,直至系统振荡消失。通过比例作用和积分作用的结合,可以有效地将自动控制系统进入稳态后的稳态误差降低至最小。需要注意的是积分作用过强可能引起系统的不稳定。
微分作用可预测误差变化的趋势,从而抵消系统惯性。在误差变化之后,由于存在较大惯性或滞后(Delay)元件,系统会进入振荡状态,更有甚者会失去稳态。为了抑制该误差,需要提前预测误差变化的趋势。微分调节在误差接近零时几乎不起作用,当误差产生过冲时,微分调节为负值。由于微分具有超前判断的特性,相较比例控制,它对被控系统的作用更为及时,因此,微分可以改善系统的动态性能。需要注意的是微分作用过强,可能引起系统的振荡。
PID 控制器的参数整定方法较多。根据不同的物理系统,可分为临界比例度法、衰减曲线法、试凑法、经验数据法等。参照不同的方法,结合一定的公式进行计算,便可以得出具体的PID 控制器的参数数据结果,但是,在实际应用过程中,调试时,需要参照以往的实际情况和实践经验,大致设定出经验值。之后,结合具体的调节效果对相应的数值进行修改,直到得出最佳的结果。因此,PID 参数整定方法不是唯一的,只要被控对象主要指标达到设计要求即可。
在稳态状态下,整个系统保持静止状态。如果发生一定的扰动,系统将失去平衡,此时闭环控制会被触发以实现自我调节。通过适当的调整,系统逐步达到新的平衡状态[5]。
2 设备概述
2.1 温湿度检定箱组件构成
本实验研究的对象是由温湿度检定箱与冷镜式露点仪组成的恒温系统。
Dew Master 冷镜式露点仪采用冷镜冷凝(露点)法,首先通过嵌入镜面中的温度传感器测量镜面温度,然后再通过控制电路及铂电阻对镜子进行温度控制,以保证在镜面上沉淀的冷凝物维持在一定的数量。冷凝水颗粒的数量通过光电装置探测,再根据公式换算出镜面的露点温度,结合气压值,计算湿度值。
EC4 温湿度箱控制的温度范围在7 ~85 ℃,湿度范围在10%RH ~95%RH。箱内的露点温度高于4 ℃(Dp)。调湿系统基于双温法控制原理。该设备具备了微处理可编程的特性,既可在实验室使用,也可以应用于过程控制。
2.2 温湿度检定箱控温系统
温湿度检定箱工作时,由测温仪采集温度传感器PT100 的电阻值,获得当前温度。控制器根据当前温度,调控恒流电源的输出功率,驱动插在测试箱的空气蒸汽中的空气加热器进行温度调控[6]。
温湿度检定箱控制系统加热采用的步骤为先恒定空气加热器输出值使系统趋近稳定范围,然后改变空气加热器的输出值并恒定不变,从而得到温湿度检定箱控制系统的阶跃响应。具体构造参见图2。

图2 温湿度检定箱内部结构
恒温箱在工作状态下,热源可以分为空气加热器热辐射、环境热辐射、箱内器件热辐射3 个部分。其中,环境热辐射和箱内器件热辐射以扰动的形式影响控制系统。然而在实际工作时,由于热端散热不理想、环境热辐射等原因,热端温度会发生变化。因此,可以看出空气加热器输入和输出间不仅存在非线性关系,而且受多个参数和因素的影响。由此得出,恒温箱具有非线性和时变的特性。在环境温度扰动和系统时变特性的影响下,传统的PID 调节很难获得稳定的控制效果,需要定期重新调整恒温箱的PID 系数。
3 数学建模
首先,需要对温湿度检定箱的物理系统进行数学建模。本实验采用积分分离模糊PID 控制方法[7],首先给被控的温湿度检定箱输入一个阶跃信号,然后记录输出的偏差量以及偏差量的变化率,得到PID 控制器的比例调节量、积分调节量以及微分调节量。最终获得响应曲线以及对应的实验数据,将其进行仿真拟合计算,确定其模型结构和模型参数。
3.1 实验数据收集与处理
实验使用露点仪、温湿度检定箱及其配套的数据采集软件。温湿度检定箱温度均匀度为0.24 ℃(k=2,扩展不确定度U=0.05 ℃),温度波动度±0.07 ℃(k=2,扩展不确定度U=0.02 ℃/30 min)。露点仪经过溯源,温度准确度≤±0.1 ℃。传感器布置在箱体中心点。在容差范围内,露点仪温度可以视作箱内温度。温度测量数据扩展不确定度为U=2 ℃(k=2)。在实验过程中,设定26 ℃的温度点,运行温湿度检定箱稳定至设定温度,在此过程中同时运行温湿度检定箱配套的数据采集软件对这一段过程的数据进行记录并导出。
温湿度检定箱配套的数据采集软件导出的原始实验数据为txt 格式(如图3 左侧所示)。经过Python 清洗处理,去除冗余信息,提取关键参数(时间、温度、湿度),最后转换成方便仿真程序处理的Excel 格式(如图3 右侧所示)。

图3 数据处理
随后,将处理过的数据导入仿真软件的工作空间,并将要拟合的数据以数组的数据类型方式提取出来及对数据进行曲线拟合。观察被控量(温/湿度)随时间变化的关系,将时间作为x变量,温/湿度数据幅度值作为y变量,分别载入曲线拟合工具箱中的x和y坐标中并依次选择权重关系、拟合方式等控制拟合准确度的参数,使得拟合结果更准确。研究表明,温湿度检定箱控制系统的数学模型可以通过一阶惯性滞后环节来描述[8-9]。本实验中选择有理函数模型,最终得到的决定系数(也称拟合优度,coefficient of determination) 较高,为0.931 397 63,说明模型拟合较好。
综上所述,获得温湿度检定箱控制系统根据阶跃曲线响应所确定的时间与响应曲线的传递函数模型如式(1)所示。
3.2 仿真建模
建立研究对象的系统仿真图并得到系统的动态模型,如图4 所示。
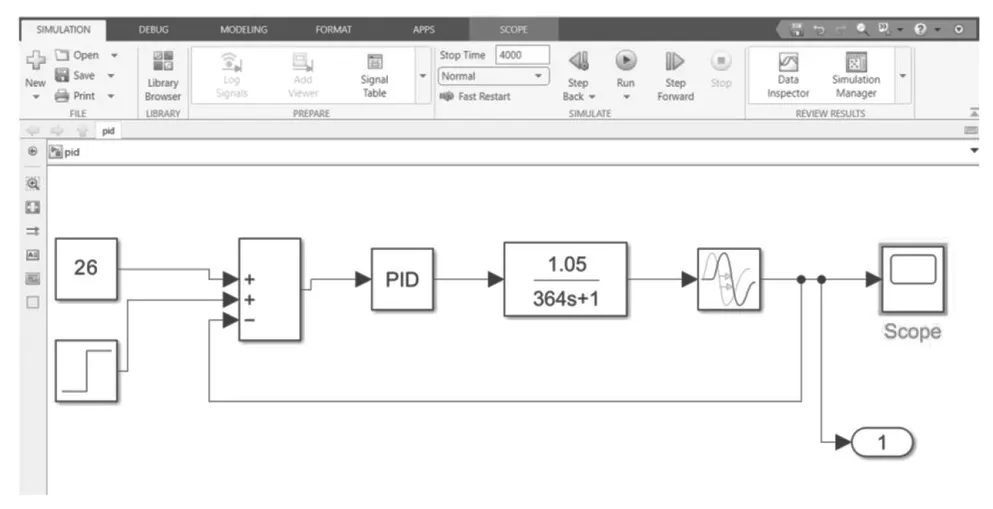
图4 拟合参数
下面对系统仿真图的主要模块及参数选择进行说明。
输入模块用于接收传入传递函数模型的两个信号,并将其输入模型中进行拟合。“26”是设定值。“step” 是阶跃信号值。其中,需要对阶跃时间(step time)进行设置,阶跃时间是给定源参数变化的时间,它决定了控制模块的执行速度。因此,首先对温湿度检定箱历史温度变化的速度和温度对输入变化做出显著反应所需的平均时间进行观察和统计,得到该系统的时间常数为30 min。在权衡准确度和模拟时间后,选择2 000 作为阶跃时间。
PID 模块:根据所需的设定点和实际过程输出之间的误差来调整控制信号,从而实现系统运行过程的控制功能。其中需要确定比例增益(Kp)、积分增益(Ki)、导数增益(Kd)。
首先遵循文前所述的参数调整原则,初始状态先设积分时间T为无穷大、Td微分时间为零,在程序中设定即Ki=Kd=0,然后慢慢提高Kp,观察系统变化曲线。Kp越大,曲线坡度越明显,则响应的速度越快。如果响应过于振荡或不稳定,则减小Kp。按照以上方法对Kp进行微调,以实现快速达到设定点的响应,而不会出现过大的过冲或振荡(微小的超调量是可以接受的)。最后在该Kp值的基础上减少10%作为Kp值使用。
随后引入Ki,增大Ki以减少稳态误差。较高的Ki可帮助控制器消除设定点与实际输出之间的剩余恒定误差,然而过高的Ki会导致不稳定或过冲。从0 开始,逐渐增大Ki值,直到控制系统的响应曲线出现抖动时,停止增加Ki。最后同样在Ki值的基础上减少10%作为Ki值使用。
在保持Kp和Ki值稳定的同时,引入Kd。调整Kd可抑制振荡并减少过冲。较高的Kd有助于抵消误差信号的快速变化,防止快速振荡。
经过调节,得到能使曲线表现最佳的PID 参数,调整值为Kp=3,Ki=0.05,Kd=1。
传递函数模块:用于输入之前拟合的式(1)。
传输延迟模块:用于模拟系统响应的时间延迟。其中时间延迟参数决定输出滞后于输入的时间。初始输出参数定义程序块在初始延迟期间(达到时间延迟之前)输出的值。一旦模拟时间超过延迟时间,程序块就开始输出延迟响应。由于空气加热器的输出执行与被控的温湿度检定箱的状态存在时滞,导致被控的温湿度检定箱不能迅速地将系统发生的扰动响应反馈给空气加热器,从而使调节时间变长。通过统计历史状态以及多次仿真运行验证并观察系统行为,最终确定30 作为时间延迟,40 作为初始输出。
示波器模块:用于输出波形。
停止时间:由于试验持续时间以及温湿度检定箱稳态收敛时间需要将近1 h,为了能捕捉到足够多的行为,选择停止时间为4 000 个仿真步骤。
运行后在示波器模块得到图5 所示波形图。评估该动态过程的PID 控制系统质量指标[10],可以观察到系统响应曲线在400 个仿真步骤之后到达终值上下5%区间且波形趋于平稳,即可视为稳定在这个区间。

图5 仿真响应曲线
4 测试结果
以温湿度检定箱温度为被测对象,在SmartPadTM 中设定温度值为26 ℃,按照前述的PID参数进行温度测试,得到第一次达到设定值时间48 min。观察图6 曲线看出系统已经逐渐趋于稳定,但曲线还不够平缓,其超调量和震荡还需要减小,控温准确度有待提高。这表明整定效果还有改善的余地。考虑到物理环境中还有很多影响因素不能被仿真模型所囊括,理论与实验的误差普遍存在。观察曲线形态判断类型为线性问题,通过凑试法调整即可。于是在仿真数据的基础上,使用人工凑试的整定方法进行微调。最后当Kp=1,Ki=0.25,Kd=1,可以看出温度稳定时间有所缩短。

图6 实验响应曲线
5 结语
本文通过深入分析温湿度检定箱的控温系统,提出了一种基于PID 参数调整的新方法。在实验验证中,观察到通过调整PID 参数,温湿度检定箱的温度稳定时间显著缩短,且控制准确度得到了有效提高。这证实了方法的实用性和有效性,为温湿度校准提供了更准确和可靠的环境。
尽管取得了积极的成果,但也存在一些尚未能解释和解决的问题。例如,温湿度检定箱中复杂的热传导和湿度传递过程,以及传感器的非线性响应等因素,可能会对控制准确度产生一定的影响。可以进一步探索这些问题,并提出更加精细化的控制策略,提高温湿度检定箱的性能。
通过对PID 参数的整定,成功改善了温湿度检定箱的稳定时间和控制准确度,为温湿度计校准提供了更可靠的测量环境。在未来的研究中,可以进一步优化控制策略、提高系统的自适应性,以应对更复杂和多变的校准需求。
相信这项研究将对温湿度检定箱的稳定性控制和温湿度计校准的准确性有所推动,并为未来相关领域的深入研究提供有益的借鉴和参考。
