基于嵌套粒子群结构的复杂系统维修决策优化方法
2023-12-04张友鹏苏中集张美艳
张友鹏,苏中集,石 磊,张美艳
(1.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2.甘肃省轨道交通电气自动化工程实验室,甘肃 兰州 730070)
0 引言
2015年,我国提出了《中国制造2025》,以加快推进制造业创新发展,力图将信息技术与轨道交通、航空航天、生物医药等领域深度融合,全面提升制造业发展质量,实现高端工业装备的智能、绿色发展[1]。随着产业变革的深入推进,各个领域的系统组成结构越来越复杂、智能化程度越来越高,导致其研制、生产,尤其是维护的成本越来越高,因此复杂系统的维护问题日益受到重视。传统维护工作主要以恢复系统或设备既定功能的事后维修(Corrective Maintenance,CM)为主,适用于维修成本低或者故障率是常数的设备,但对于复杂系统而言,事后维修可能会造成其他部件的二次损伤,并且需要庞大的备用维修组,导致维修成本大幅增加,因此智能维护(Intelligent Maintenance,IM)的研究与应用备受关注。早在2002年美国财富杂志将系统智能维护评选为未来制造业最热的三项技术之一。在2015年~2020年间,法国国营铁路公司采用智能化维护方式对机车车辆进行维护,不仅使维修成本降低了20%,还大幅提升了机车车辆的可靠性、可用性和服务质量[2]。
所谓智能维护就是为实现系统接近于零故障的运行提供低成本解决方案。通过设备的点检、定检、监测和故障诊断提供的信息,经过分析处理,引入嵌入式智能代理技术和性能衰退预测技术,统筹规划现场的资源进行分配调度,制定其维修策略的一种预测性维护方式。一些学者对该课题展开了相关研究,2006年,蔡景等[3]对飞机的空调系统提出了成组维修策略,建立了以费用和利用率为目标的维修决策优化模型,并分析了所建模型的合理性和经济性;BOUVARD等[4]提出一种自适应调度的多部件复杂系统成组维修决策方法,并成功应用于多组件复杂系统的维修当中;基于元启式优化算法,许多学者对复杂巨系统提出了系统级不完全维修决策方法,对系统可靠度与维修成本作为竞争性目标进行优化,得到符合现场条件约束的一系列非劣可行解[5-7]。然而,以上研究均未考虑可用度等优化目标,以及在系统维修机会的制定上缺乏对系统生产要求的考虑等。
2016年,赵斐等[8]提出利用延迟时间理论得到复杂系统单位时间利润最优的维修策略模型;2019年,杨建华等[9]提出了复杂系统可靠度、可用度及维修成本的多目标维修优化模型,得到效用值最大的维修方案;然而维修现场环境复杂,在考虑复杂系统本身之外,还需将维修备件、事件扰动及维修人员等纳入决策模型。2020年,王海朋等[10]提出一种多员维修的系统组件维修分配的解析算法,建立了不完全维修条件的复杂系统选择性维修模型,并成功应用到捷联惯性导航系统中,但其未考虑维修人员薪资对于维修成本的影响,导致在相同的成本约束下可能出现与实际成本较大的偏差。鉴于以上研究,本文针对复杂系统在固定巡检间隔的维修决策问题,提出了考虑维修人员数量的三目标维修决策优化一般方法,对维修人员的任务分配这一并行调度问题提供了一种新的元启发式解决途径,再将可靠度、可用度及维修成本进行三目标优化,得到该竞争性三目标在3个维度的Pareto前沿解集,分析计算了粒子在三目标的倾向关系,可为决策者推荐非劣解集中的最优维修方案,使得复杂系统在未来一个维修计划期中获得尽可能高的可靠度、可用度和较低的维修成本,并提供定量化的决策支持,使该方法的应用更加科学和广泛。
1 复杂系统维修决策模型
1.1 复杂系统
复杂系统的特点包括系统行为复杂、信息交换复杂、系统结构复杂、系统的组件间以及系统与其外界交互关系复杂等[11],其结构中一般混合有串联、并联、冗余及表决等组件或子系统,例如飞机导航设备中加速度计的表决系统、高速铁路车站联锁设备中2×2取2冗余系统,以及各种热备、暖备、冷备系统等。由于成组环节和影响因素的增加,系统发生停机的几率也逐渐升高。由文献[12]中对巡检间隔与系统影响的研究可知,如果采取增加巡检次数,缩小检修间隔等单一目标维修方案,虽能使系统及时返回到正常状态,但随着巡检间隔逐渐缩短,设备故障的频率逐渐降低,最终趋近于一个定值,然而维修并不能使设备一直处于有效役龄之间,因为随着维修次数的增加,该设备的退化速率将逐渐增大,如果无限降低巡检间隔,反而会造成维修成本的升高和设备总体停运率的上升。因此兼顾可靠度、维修成本和可用度使系统的效能指标和经济性实现竞争最大化是维修决策的关键所在。
1.2 三目标维修决策模型的建立
1.2.1 可靠度
复杂系统都由若干个组件构成,对于每个组件而言,其可靠度的退化服从一定的规律[13],可用指数分布或者威布尔分布等进行描述,具体分布函数的选取及参数的确定如下所示:
步骤1对研究对象的历史数据统计,得到其故障间隔数据,进行核密度估计后选取其可能存在的分布函数f,如下所示:
(1)
步骤2根据f得到对数似然函数fD,再对其参数(γ,α,β)进行极大似然估计:
(2)
步骤3对可能的分布函数退化进行k-s假设检验,选取最优分布模型。
在得到组件退化分布函数后,即可得到该组件的可靠度R为:

(3)
失效率λ为:
(4)
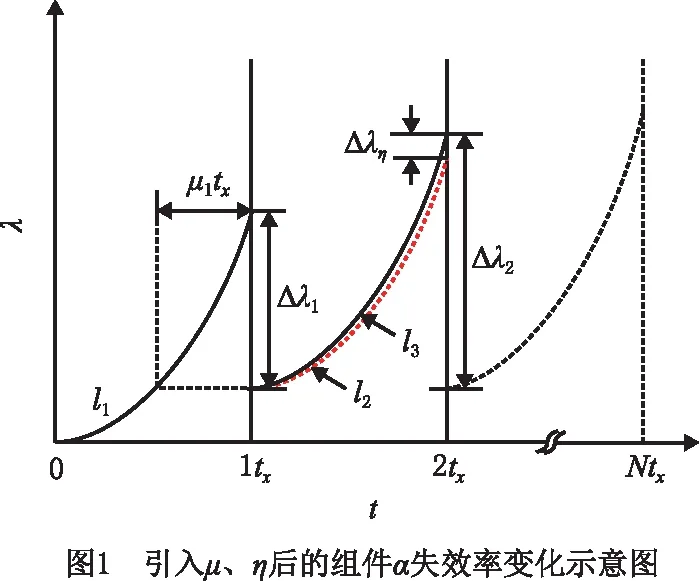
假设复杂系统包含n个组件,记为{a,b,…},巡检间隔为tx,巡检次数为N,每次维修都可以从m个维修等级中选择,引入役龄回退因子μj,(j=1,2,…,N)定量描述不同维修等级对设备的恢复程度,因维修只能延缓设备故障,并不能使设备一直处于正常状态,则引入故障率增加因子η,以准确刻画设备的状态变化,组件a(a∈{a,b,…}) 的失效率变化趋势如图1所示。
(5)
由式(3)~式(5)可知,组件a在一个维修计划期中的可靠度为:
(6)
复杂系统在一个维修计划期中组件平均可靠度和不可靠度为:
(7)
(8)

步骤1根据系统结构写出其邻阶矩阵,得到最小路集;
步骤2对系统最小路集做不交化处理得到不交化最小路集L;
(9)
(10)

1.2.2 可用度
稳态可用度反映设备在规定时间内正常状态所占的时长比例,是系统可靠性与维修性的综合体现。对复杂系统而言,影响可用度的因素不仅是巡检时长、组件维修时长等,还与现场维修人员数量、专业程度等有关。在每次检修节点,n个组件将产生n个维修任务(Task=[task1,task2,...,taskn]),然后将r个维修人员(Hum=[hum1,hum2,...,humr])进行编号,维修人员数量的多少决定系统在该检修节点的总维修时长,即将多维修人员与多维修任务进行合理分配,让总维修时长最小,系统可获得更高的可用度。
n个维修任务合理分配给r个维修人员属于并行调度问题。调度问题的排序模型解空间是一个巨大且扁平的空间,其内部遍布各种局部最优解,即峰顶,而全局最优解(最高峰顶)与其他局部最优解之间的差值具有很大的随机性,导致解与解之间具有无梯度性,带保优以及边界吸收策略的算法难以开发更为优秀的解空间,因为保优更趋向于搜索已经搜索过的空间。另外在算法迭代过程中,粒子飞出边界的概率非常高,而边界吸收策略会让大多数粒子收敛于边界处,使粒子丧失搜索性能[16-22]。因此本文对底层任务分配问题,提出一种具有边界反射机制的粒子群解决方法,让超出空间的粒子在边界处进行反复折叠,使该粒子落入决策空间中,重新激活粒子的搜索性能,如式(11)所示:
(11)
式中:lowb表示下边界,upb表示上边界,粒子p从i代向i+1代飞行时,反复判断处理使得粒子全部落在[lowb,upb]之间。
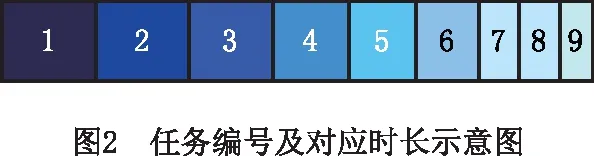
采用文献[10]的维修任务分配案例进行验证。则组件为(E1,E2,E3,E4,E5,E6,E7,E8,E9),在检修节点时产生的9个维修任务时长分别为3.5h,3.3h,3.1h,2.8h,2.5h,2.3h,1.5h,1.5h,1.2h,如图2所示。
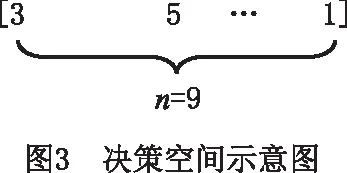
在分配过程中,首先将维修任务和维修人员进行编号;然后算法随机生成n个1~r之间的随机数,(rand1,rand2,…randn,rand∈[1,r]),randn代表将第n个任务分配给第randn个维修人员,作为底层算法的决策空间,因此底层算法决策空间编码长度为9位,如图3所示。学习因子c1=c2=2.496 2,惯性权重ω=0.729 8,粒子种群个数为30,迭代次数1 000代,其目标函数为最小化最大维修时间Tmin,将计算结果保存,于下一次迭代结果比较,进行迭代寻优。
当维修人员r =2和 r =3时计算结果如图4所示。对迭代后的全局最优解进行解码得到每个维修人员需要分配的任务,如图5所示。
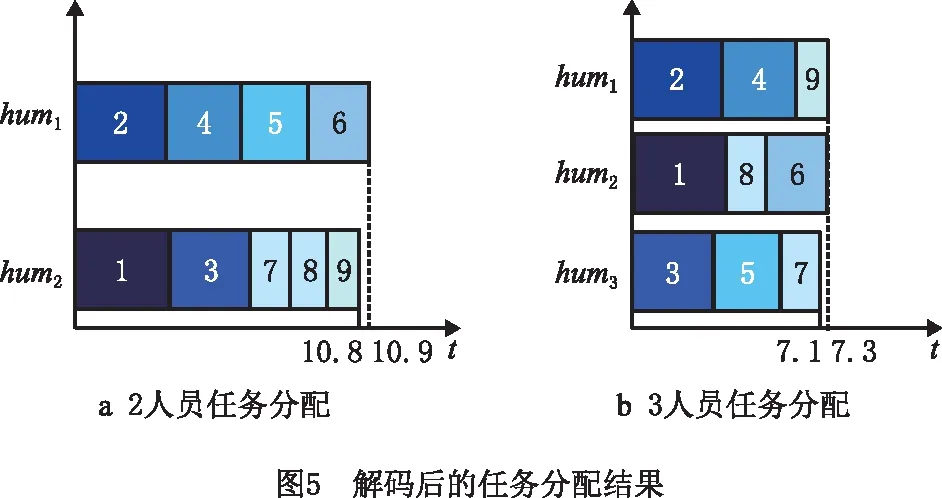
由图4和图5可知,底层求解结果与文献[10]中计算结果一致,证明了该方法的正确性与有效性,且算法在迭代早期就已经收敛至最优解,体现了边界反射机制的元启式算法在此类问题中的优越性,因此该方法也符合本文所建立的两层嵌套算法结构中底层算法必须收敛至全局最优的要求,从而防止对顶层算法的目标值增加额外的不确定性因素,根据以上方法得到系统在一次检修节点的最小化最大维修时间Tmin,其直接决定了系统的停机维修时长,则系统在一个维修计划期中的平均修复时间MTTR为:
(12)
式中:Tmin,j表示第j次检修节点的维修时间,TXJ,j表示第j次检修节点的固定巡检时间,本文中假设在每次检修时TXJ,j为一个定值。则系统在一个维修计划期中的平均无故障工作时间MTBF为:
(13)

(14)
(15)
式(14)为基于多维修人员的复杂系统在一个维修计划期中可用度的优化目标,式(15)为不可用度优化目标,其中Tmin不仅决定系统可用的高低,还对系统维修过程中停机损失成本产生直接影响。
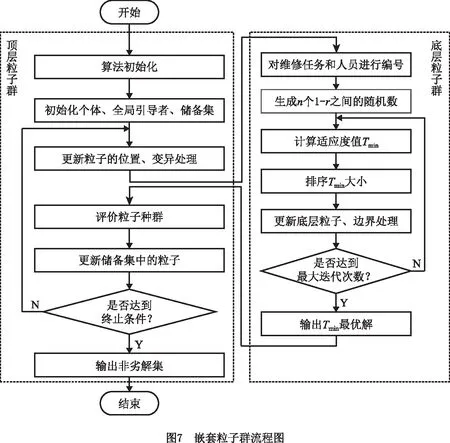
1.2.3 维修成本

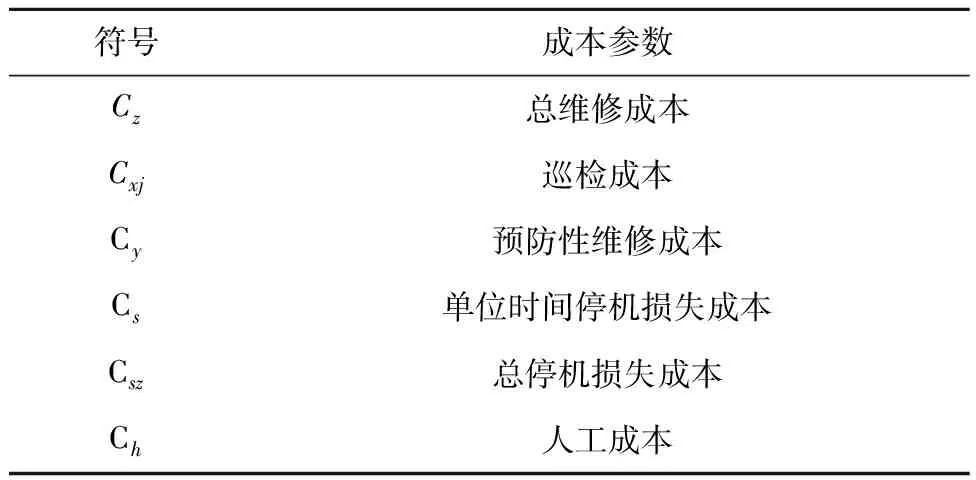
表1 成本参数设置
(16)
(17)
停机损失成本:
(18)
人工成本为:
(19)
总成本为:
Cz=Cy+Csz+Ch+Cxj。
(20)
式(20)为系统维修的总成本,因为系统的可靠度和可用度属于效益型指标,越高越好;系统的维修费用属于成本型指标,越低越好。因此为便于优化计算,将3个模型转化成最小化优化问题,即不可靠度、不可用度和维修成本,则优化模型可以表示为:
minA′,
minCz。
s.t.
(21)
式(21)中约束条件为组件平均可靠度下限和系统可用度下限,但约束条件可根据系统特性不同以及应用工况的变化等情况进行差异化设置。该模型为建立的复杂系统三目标维修决策优化的顶层模型。其决策空间由N×n维决策变量构成,每个决策变量有m种不同的取值,因此该模型存在mN×n个解,因为3个目标之间存在相互竞争性,所以采用多目标优化算法来搜索寻找非劣解。
2 维修决策模型的嵌套优化
本文所建立的维修决策模型属于离散复杂多目标优化问题,多目标优化问题又称为向量优化问题,由决策变量构成决策空间X,由目标函数值构成函数空间O,可以用数学描述为:
miny=f(x)=(f1(x),f2(x),…,fk(x))。
s.t.g(x)=(g1(x),g2(x),…,gs(x)),
x={x1,…,xn}∈X,
y={y1,y2,…,yk}∈O。
两个空间由目标函数建立了映射关系,在优化过程中,将两个粒子种群进行嵌套,Pareto前沿位置的粒子反映维修决策模型在优化过程中不被支配的粒子,这些粒子组成Pareto前沿。
顶层多目标维修决策模型的目标空间中存在很多局部最优点,采用较小邻域的粒子群优化(Particle Swarm Optimization,PSO)算法可以有效避免算法陷入局部极值点,该邻域可以看作是粒子群拓扑中的一个子区域,一般由粒子在拓扑图中每条边上距离最近的粒子组成,每个粒子受邻域中其他粒子的影响[23-27]。顶层粒子当中都包含一个底层的粒子种群,而底层种群采用全连接拓扑结构,提高其对顶层模型的信息传输速度。在优化过程中,首先由底层粒子群算法得出任务分配后的最小化最大维修时间,再输出至顶层的多目标优化模型中,进行搜索优化,则两层嵌套结构的粒子群示意图如图6所示。
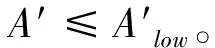
在顶层算法中,为最大限度减少主观因素对解的影响,采用一种少控制参数的骨干多目标粒子群优化(Barebones Multi-objective Particle Swarm Optimization,BB-MOPSO)算法,该算法采用高斯采样进行每个粒子位置的更新,替代粒子群中的学习因子与惯性权重等参数,且算法在开始迭代时,其粒子的位置分布近似于标准粒子群迭代次数趋于无穷大的分布特性,与传统粒子群和其他进化算法相比,BB-MOPSO算法在多目标优化问题上具有较好的收敛速度和性能。其粒子更新公式如式(22)所示:式中,U为[0-1]的随机数,可以使粒子以更快的速度构建优秀目标空间,又不丢失粒子的多样性。算法步骤如图7所示。
(22)
如图7所示,右侧为底层粒子群算法,用来搜索Tmin,其结果输出至左侧顶层多目标粒子群,左侧顶层多目标粒子群优化算法用来优化可靠度、可用度和维修成本3个目标,在每次顶层粒子迭代过程中,都要完成一次底层粒子群的优化,用以支持顶层粒子的计算。
3 算例分析
3.1 维修模型优化
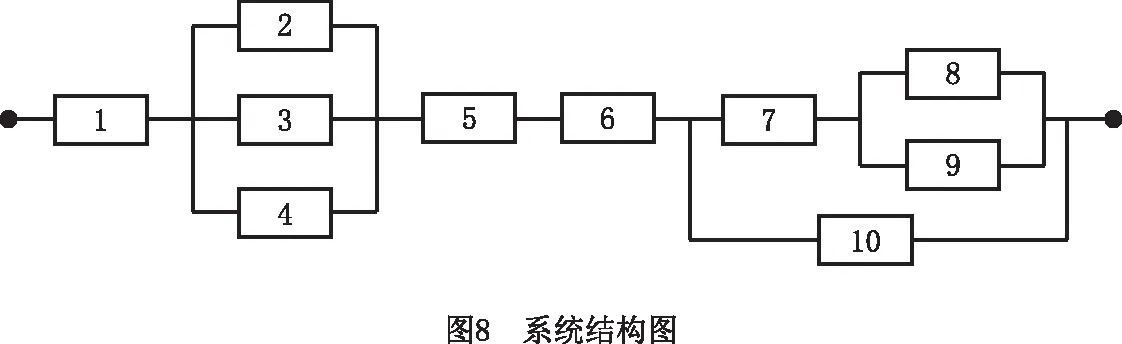
本文以文献[28]中的复杂系统为例,系统结构如图8所示,系统参数如表2所示。该系统每年春秋进行两次集中维修,设定系统一个维修计划期为5年,则N=10,维修分为不修、小修、大修和更换,即m=4,子群粒子种群数量为30,迭代次数1 000代,总群粒子种群数量为30,迭代次数为300代,外部储备集容量设定50个粒子,则系统维修决策模型存在4100个解,则该系统多目标维修决策优化结果随现场维修人员数量变化情况如图9所示,分别为现场维修人员数量由1人增加至9人的仿真结果。
表2 系统参数
在图9中,x轴为R′sys,表示系统维修计划期不可靠度;y轴为Cz,表示系统维修计划期中的总成本;z轴为A′,表示系统维修计划期不可用度。以图9a为例,前沿粒子分布在x轴由0.8逐渐降低的同时,y轴随之逐渐升高至6×10-3,而z轴也逐渐由α增加至10×105,即系统在可靠度增加的过程中,可用度随之降低,维修成本增加,采用x轴投影渐变渲染方式以直观反映该三目标的竞争性,符合实际维修情况。决策者为系统制定维修计划时,期望不可靠度、维修成本以及不可用度越低,现场维修人员越少越好。因此,随机固定模型优化后的可靠度,可得到不同维修人员情况下可用度和维修成本的变化规律,如图10所示。


在图10中,随着人员数量的增加,呈现出可用度和维修成本都大幅变化的趋势,表明维修人员数量较少时对系统两个目标有较大的影响,当人员数量增加至6人时,系统可用度达到最大值,在人员增加至9人时,系统可用度一直保持在该最大值,表明维修节点的维修任务在超过6人时最小化最大维修时间不再发生变化。而维修成本在6人时达到最小值,因系统可靠度固定,在人数由6人增加至9人时,维修成本呈现较小的上升趋势,因为维修人员越多,总薪资逐渐升高,并成为维修成本增加主要原因。综上所述,当选择维修人员6人时,可用度最高而成本最低,因此系统最优维修方案从图9f中进行筛选。
3.2 非劣解集的筛选
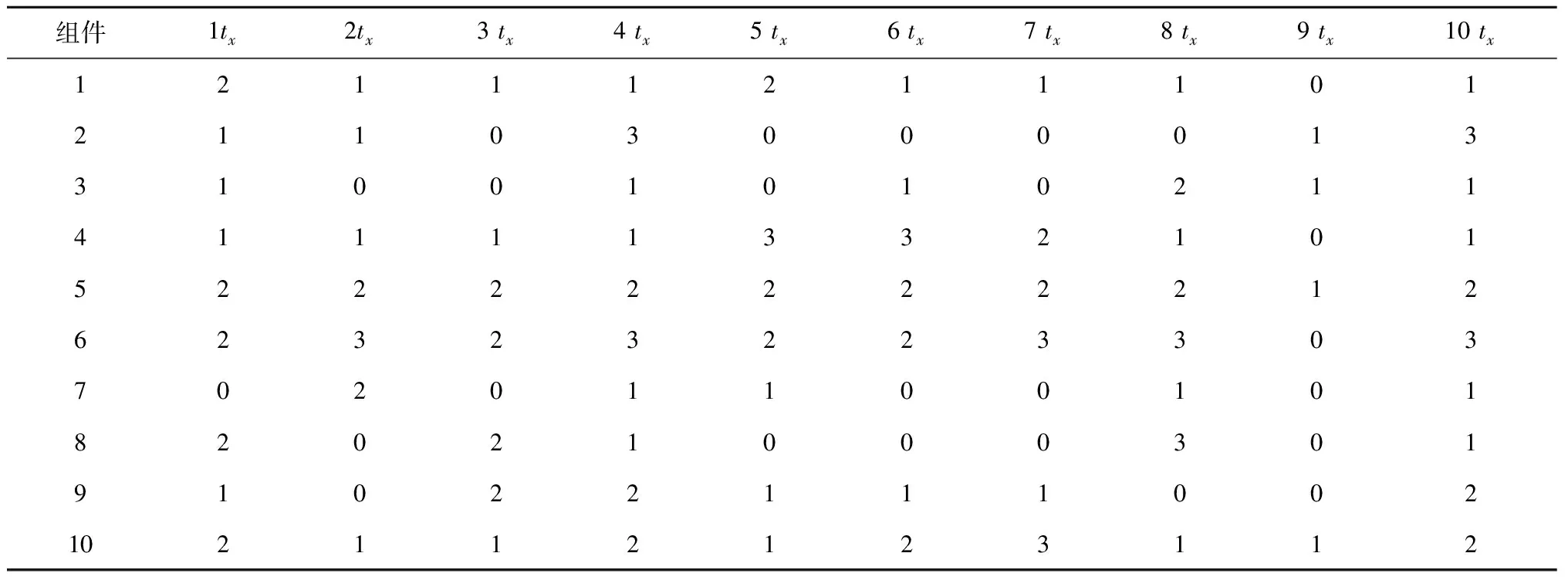
表3 系统最优维修决策方案
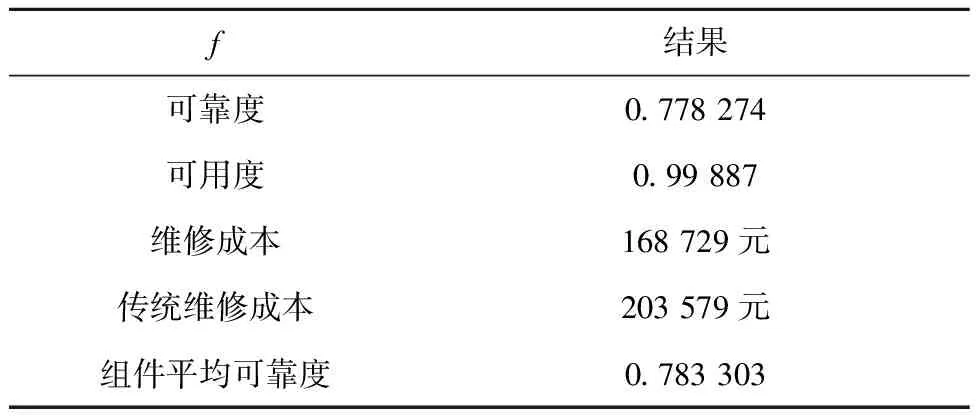
表4 优化后目标值
由表4可知,优化后的目标结果符合约束条件,分析该维修方案对现场维修人员的分配,在传统维修方案中,每次节点目标都为将设备恢复至最高水平,传统维修方案维修成本可达203 579元,因此在相同可靠度条件下,本文优化后的方案可将成本降低18.11%,可以为现场实现降低运维成本的目的。明确现场维修人员在每一个维修节点维修任务,有利于维修活动的快速展开,因此解码后该维修方案的任务分配情况如图12所示。

图中:横坐标是10次检修节点,纵坐标长度代表系统中组件在每次节点的维修人员。离散系数是测度任务数量离散程度,式(23)为每个维修人员任务数量离散系数V,式中Taskhum表示维修人员该维修人员的任务数量。
(23)
由式(23)可知,离散系数小,表示每个人员的任务量较为均衡,体现了模型的优越性。综上所述,筛选后的最优方案可以作为系统在未来一个维修计划期中维修策略,选择6个维修人员在现场执行维修计划时经济性最好。
4 结束语
本文针对复杂系统定期检修策略,提出一种基于嵌套粒子群结构的维修决策优化方法,其中利用底层粒子群算法对检修节点维修任务分配的调度问题进行求解,再用顶层多目标粒子群算法对建立的维修决策模型进行迭代寻优,优化结果对复杂系统现场维修活动中维修人员数量的设定、组件维修等级、任务分配等问题提供指导。
在进一步的研究中,应利用海量运维数据建立高精度的故障诊断系统,依托数据服务平台,整合故障诊断与维修决策信息,实现在线检修策略生成、故障精确定位、维修任务下发、应急调度指挥、作业智能监控、自动决策更新等多层域、全过程一体化技术,为系统全寿命智能维修提供理论支撑。