基于公理设计的人机协作数字孪生建模技术
2023-12-04李公法蒋国璋
刘 鑫,李公法,,向 峰,蒋国璋,陶 波,江 都,孙 瑛
(1.武汉科技大学 冶金装备及其控制教育部重点实验室,湖北 武汉 430081;2.武汉科技大学 机械传动与制造工程湖北省重点实验室,湖北 武汉 430081;3.武汉科技大学 生物机械手与智能测控研究中心,湖北 武汉 430081;4.武汉科技大学 精密制造研究院,湖北 武汉 430081)
0 引言
智能制造作为我国制造业创新发展的重要抓手,是实现制造业转型升级的重要途径,也是加速建设制造强国的主攻方向。作为先进信息技术与先进制造技术的深度融合,智能制造的理念和技术贯穿于产品开发、服务和运维等全生命周期的各个环节及相应系统,旨在不断提升企业的产品质量、效益和服务水平,减少资源消耗,推动制造业创新、绿色、协调、开放、共享发展[1]。当前,随着智能制造技术地不断发展,研究人员逐渐加强了对“人”的重视程度,提出了以人为本的智能制造发展方向,而安全可信的人机协作是实现人本智造的基础[2]。
人机协作是指人与机器之间,以实际的接触方式或者是无接触的方式进行合作,共同完成一项复杂的任务[3]。在人机协作模式下,机器只负责执行少数固定的任务,其余大部分任务交予工人处理[4]。人机协作中的人和机器可以通过直接接触或间接接触的方式共享操作意图和行为,共同协调系统内的资源与信息,共同承担系统的决策与控制,动态调整和优化任务的执行过程[3]。在执行任务的过程中,由于工人操作的不稳定性以及决策规划的不精确性,导致了人机协作并不能总是顺利地完成[5]。近年来,数字孪生技术的兴起推动了人类生产生活的数字化、网络化和智能化发展,有效促进了人机协作过程中的状态感知、认知分析和控制决策,为实现面向人本智造的人机协作新范式提供了新思路。面向人本智造的人机协作新范式旨在以人为核心,关注人在协作过程中的状态变化,这与数字孪生技术所强调的以虚仿实、以虚映实、以虚控实和以虚优实相匹配。通过构建人机协作数字孪生系统,积累并学习人的技能知识、交互特征和偏好需求等,充分发挥人的灵活性和主观能动性,推动人机协作方式的发展。
数字孪生的研究对象称为物理实体,通过在虚拟空间中构建物理实体的副本——虚拟模型,利用历史数据驱动虚拟模型的仿真运行,从而实现对物理实体工作状态的监控、优化以及预测等目的[6]。数字孪生驱动的人机协作智造以人机虚拟模型为基础,利用智能化设备采集人和机器人的各类数据,并结合智能算法,在虚拟空间中模拟、指导和优化人机协作过程,促进人机协作过程的顺利进行。在基于数字孪生的人机协作相关研究方面,MARUYAMA等[7]开发了一个基于数字孪生的人机协作系统,该系统可以实现对工人运动的测量,并模拟工作进度和物理负荷。LYU等[8]提出了一种基于数字孪生的人机协同装配框架,该框架由物理装配系统,虚拟装配系统以及数据管理中心组成。通过对数据的分析,更新装配性能和装配行为。鲍劲松等[9]提出面向人—机—环境共融的数字孪生协同技术,研究人员可以在虚拟空间中规划机器人的轨迹,并模拟人机协作的装配过程,提升了人机之间作业的协调性。MALIK等[10]提出了一种基于虚拟现实的人机协作仿真验证框架,讨论了如何利用可视化、沉浸和触觉的仿真以及虚拟现实来设计和评估人—机器人生产系统。LI等[11]提出了一种基于数字孪生的人机协作安全控制框架和相应的控制方法,通过构建多种人机协作场景的虚拟模型,对潜在的安全隐患进行测试和分析。李浩等[12]系统地构建了人机交互数字孪生安全管控体系,探讨了人机协作相关的操控、控制与感知技术。近年来,虽然数字孪生在人机协作领域的应用不断丰富,但大多数研究的重点在于如何通过数字孪生实现工作任务,对于模型具体构建过程的描述并不多,缺乏一套详细的、完整的人机协作数字孪生模型建模方法与实施步骤。模型是数字孪生的核心要素,模型构建是实现对物理世界映射、交互和预测的基础和前提。与大多研究领域中的单一研究对象不同,人机协作领域中包含人和机器人两个研究对象。因此,如何分别构建“人”和“机”的数字孪生模型,充分融合人的灵巧性和机器人的准确性,从而得到满足人本智造需求的人机协作数字孪生模型,这是当前人机协作领域中应用数字孪生技术的难点。
公理化设计(axiomatic design)是一种辅助人们完成产品设计的方法[13]。公理化设计理论可以帮助人们完成设计方案的确定,实现工程应用的探索。LI等[14]基于公理化设计理论和可拓学的创新设计方法,对分布式混合动力拖拉机的动力系统结构进行了创新设计分析。FAZELI等[15]提出了一种改进公理化设计理论的的产品开发设计方案,通过矩阵运算映射不同的设计域,生成基于设计准则的可行概念。杜轩等[16]将公理化设计理论与多色集合相结合,实现了树障清除机器人的结构设计。也有学者将公理化设计理论引入数字孪生领域,WEI等[17]提出了一种利用公理化设计理论的数字孪生物理实体部署方案,解决了物理实体的具体应用问题。由此可见,公理化设计理论在上述研究中得到了广泛的应用,并取得了良好效果。人机协作数字孪生模型的建模方案涉及到人和机器人的模型需求分析和模型构成分析,这与公理化设计理论中的用户域和功能域等设计域之间的映射关系相匹配。将公理化设计理论引入人机协作智造数字孪生模型的建模过程中,可以提供合理的设计思路,使设计方案更加科学,进而充分发挥数字孪生技术的优势,提高人机协作的效率。
本文提出的“基于公理设计的人机协作数字孪生建模技术”中,充分考虑“人”和“机器人”的模型构建需求以及应具备的模型特点,基于公理化设计理论提出一套人机协作领域数字孪生模型的建模方法,以期为数字孪生技术在人机协作领域的应用提供参考。
1 人机协作数字孪生模型建模机理分析
1.1 人机协作数字孪生模型特征分析
基于模型和数据的融合,数字孪生所体现出地监控、仿真、预测、优化和控制等功能,与当前各行业所强调的数字化、智能化发展密切相关,也因为数字孪生与相关业务的密切结合性,在越来越多的领域中得到了应用[18]。数字孪生在不同行业的应用需求不同,从而构建的数字孪生模型也不同。与航空航天、船舶和城市等传统的工业应用不同,人机协作领域的数字孪生模型要求以人为本[19],物理实体由一般的机械设备和协作人员共同组成。虽然车间数字孪生中也会有工人的存在,但其主要作用是为了体现生产环节的完整性[1],而人机协作数字孪生中的协作人员作为与机器交互的主体,其运动轨迹、交互特征等都需要明确。因此,在开始建模之前,需要对人机协作智造领域数字孪生模型的特征进行分析,从而便于构建以需求为导向的数字孪生模型。
1.1.1 机器人模型
传统的工业生产中,数字孪生研究的对象都是机械设备,其虚拟模型是通过对机械设备的几何尺寸和物理属性进行描述得到的[20]。人机协作中的机器人与传统工业生产中的机械设备不同,不仅需要精确地完成各项任务,同时还需要保障协作人员的安全。机器人的运行速度、人与机器人之间的接触力和接触距离等都会对协作人员的安全产生影响,必须保证机器人的工作参数在安全可靠的范围内进行人机协作。因此,定义机器人模型构建过程中需要考虑的影响因素表达式如式(1)所示:
Ir={cr,v,F,dmin,ir-h,lr-h,yr-h}。
(1)
式中:cr表示机器人模型与物理实体在结构尺寸上的一致性,v表示机器人的运行速度,F表示接触力,dmin表示接触最小距离,ir-h表示机器人对人员的识别,lr-h表示机器人对人员实时位置的检测,yr-h表示机器人对人员作业意图的识别。
机器人的模型首先应该保持与物理实体结构、尺寸的动态一致性。结构与尺寸的一致性是虚拟模型构建的基础,也是为后续赋予虚拟模型更多功能的前提。同时,物理实体机器人工作过程中可能会出现一些故障情况从而导致更换或添加零部件,需要机器人模型在人机协作过程中具有动态更新的能力,使得模型与实体机器人保持结构的一致性。为了实现对协作人员的保护,机器人模型需要具备对协作人员工作信息的感知能力。具体包括协作人员的识别、实时位置的检测、运动轨迹预测和机器人末端执行器与协作人员的实时距离测量。在协作过程中,机器人需要通过目标检测以及实例分割算法对协作人员进行识别,并将协作人员从环境的背景中划分出来,以确定协作人员的实时位置。在此基础之上,对协作人员的运动轨迹进行预测并计算机器人与协作人员之间的接触距离,判断接触距离是否满足最小接触距离要求。更进一步,机器人模型还应能够通过人体视觉特征识别、骨骼点检测、手势识别等方面识别协作人员的工作意图,提前明确下一步的工作内容以配合协作人员。
1.1.2 协作人员模型
以人为本的数字孪生系统旨在以人为核心,激发人类的潜能,提升人类的技能,实现人机协作的融合发展[21]。由于协作人员在工作过程中变化的情绪、不同的操作技能以及疲劳程度等复杂因素的影响,导致人的模型构建难度大。同时,协作人员在工作过程中容易受到机器人的影响,机器人较高的运行速度以及与机器人过近的距离都会导致协作人员工作状态的变化。因此,人的数字孪生模型需要具备体现协作人员工作状态以及心理状态的能力,定义协作人员模型在构建过程中需要考虑的影响因素表达式如式(2)所示:
Ih={sh,p,fh}。
(2)
式中:sh表示协作人员的工作状态,p表示人的心理状态,fh表示人因要素。
与机器人模型不同,协作人员的模型并不要求与真实人体保持相同的结构和尺寸,更多的是一种监测协作人员工作过程状态变化的功能模型。参照鲍劲松等[9]提出的机器人静态分类表,本文提出协作人员的工作状态分类表,如表1所示。
协作人员的心理状态受外界因素和内在因素的影响,外在因素是指机器人的运行速度、人机接触力大小以及人机交互距离,内在因素有很多,本文只考虑疲劳程度的影响,定义协作人员的心理状态影响公式如式(3)所示:
p=αv·βF·γdmin·θE。
(3)
式中:E表示疲劳程度;α、β、γ、θ分别为影响因素判断系数,若对应影响因素超出其安全阈值,则系数取0,否则取1。
机器人运行速度与人机接触力大于各自的安全阈值,或人机交互距离小于其安全阈值都会导致协作人员工作压力增大,使其处于高度紧张状态,从而影响人的判断能力。工作时长可以体现协作人员的疲劳程度,时长越长人越疲惫。当协作人员疲劳程度达到一定程度时就会对工作过程产生影响。外在因素由相应的物理传感器进行测量,疲劳程度由协作人员的生物电信号、呼吸、体温、血压和血氧饱和度等基本生理参数体现。利用穿戴式生理监测技术,实现单生理或多生理参数的检测,并基于监测到的生理参数辨识协作人员的心理健康状态。根据式(3)可以获得协作人员的两种心理状态,当p=0时,表示有个别或全部影响因素超过安全阈值,协作人员的心理状态受到了影响,应停止协作任务;当p>0时,表示各影响因素都在安全阈值之内,协作人员心理状态稳定,可以继续协作任务。
人因要素的表达式如式(4)所示:
fh={sk,ic,qn}。
(4)
式中:sk表示协作人员的技能知识,ic表示协作人员的交互特征,qn表示协作人员的偏好需求。
在协作任务过程中,机器人一般是固定的,而协作人员是流动的。不同的协作人员具有自己独特的操作习惯,因此,以人为本的人机协作智造要充分考虑到协作人员的差异性,在协作人员数字孪生模型构建过程中要考虑到协作人员具备的操作技能、知识储备、与机器人交互时的特征,以及个人独特的偏好需求。通过记录和分析多次工作任务中协作人员的技能知识、交互特征和偏好需求等人因要素,创建融合不同协作人员交互行为的数据集。基于深度学习相关知识,利用数据集训练交互式学习网络,帮助机器人学习协作人员的交互特征和偏好。在工作过程中,利用交互式学习网络对当前协作人员的工作数据进行分析和评估,确定机器人与之匹配的正确行为。如果预期的人员交互特征发生变化,则使用新的经验和来自协作人员的反馈调整机器人的交互行为。在建模过程中增加对这些人因要素的考虑,可以充分发挥人的主观能动性,提供自适应、安全有效的交互。
1.2 人机协作数字孪生模型构成分析
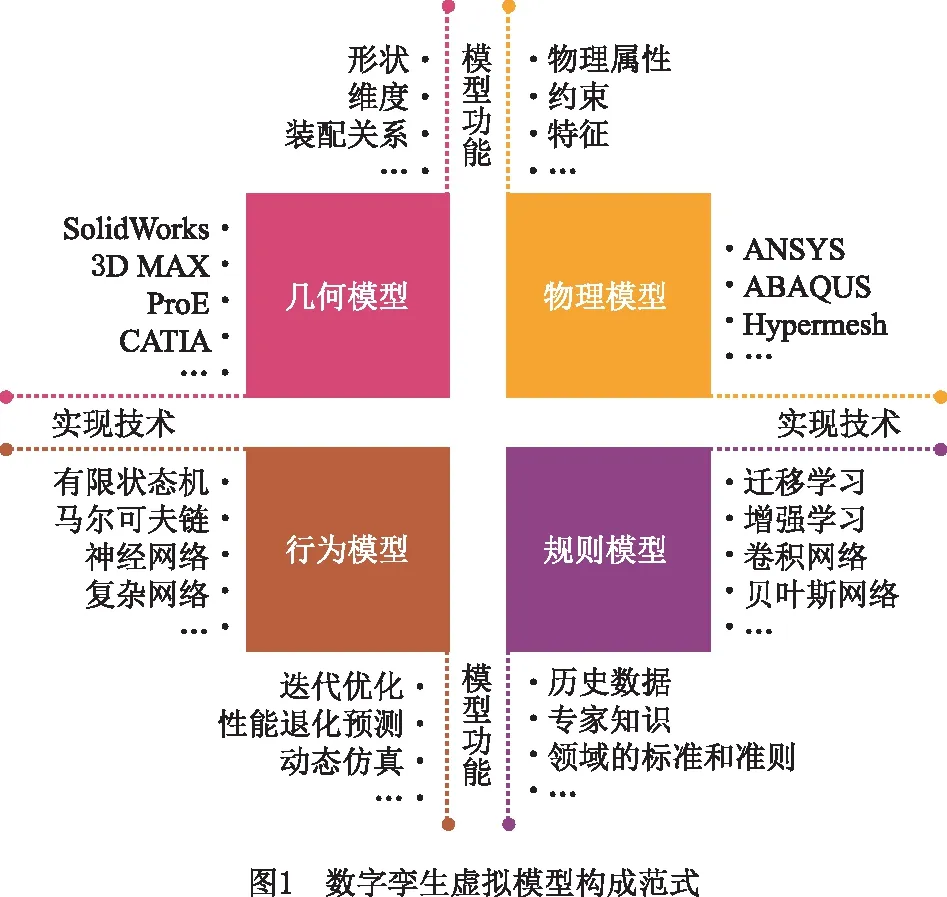
模型是数字孪生技术的核心,数字孪生建模方法的研究是当前的热点问题。陶飞教授提出的数字孪生五维模型,定义了虚拟模型的组成部分,并介绍了模型构建的工具,如图1所示[22]。这四个子模型可以从时间尺度和空间尺度上描述和表征物理实体。几何模型描述物理实体的几何参数,标准工具有SolidWorks、3D MAX、CATIA等。物理模型是指物理实体的物理属性和约束,通常有ANSYS和ABAQUS等工具。行为模型描述了虚拟模型的进化行为、实时响应行为、性能退化行为等。行为模型通常可以使用马尔可夫链、神经网络和其他方法来构建。规则模型描述了历史数据的变化规律以及相关领域的标准和准则。这4种模型从结构维度、物理性质、规律和进化发展的角度描述了物理实体,为数字孪生模型的构建提供了一个范式。目前关于数字孪生建模方法的研究大多建立在这4个部分上。
人机协作智造领域的数字孪生模型包含机器人模型和协作人员模型,基于1.1节对机器人模型建模的影响因素分析可知,几何模型、物理模型、行为模型以及规则模型可以实现机器人模型需要具备的全部功能,不需要再增加功能模型。因此,定义机器人模型的构成如式(5)所示:
Mr=(Gr,Pr,Br,Rr)。
(5)
式中:Gr、Pr、Br、Rr分别表示机器人模型的几何、物理、行为以及规则模型。
数字孪生技术在人机协作领域的应用中,协作人员的模型不要求在结构和尺寸上与协作人员保持一致,即协作人员模型不需要具备与人相同的样貌和身高。因此,协作人员的数字孪生模型舍弃了几何模型和物理模型,增加监控协作人员呼吸、体温和血压等各项身体指标变化的生理模型,定义协作人员模型的构成如式(6)所示:
Mh=(Sh,Bh,Rh)。
(6)
式中:Sh表示生理模型,Bh表示行为模型,Rh表示规则模型。
2 人机协作数字孪生模型建模技术
2.1 人机协作数字孪生模型构建框架
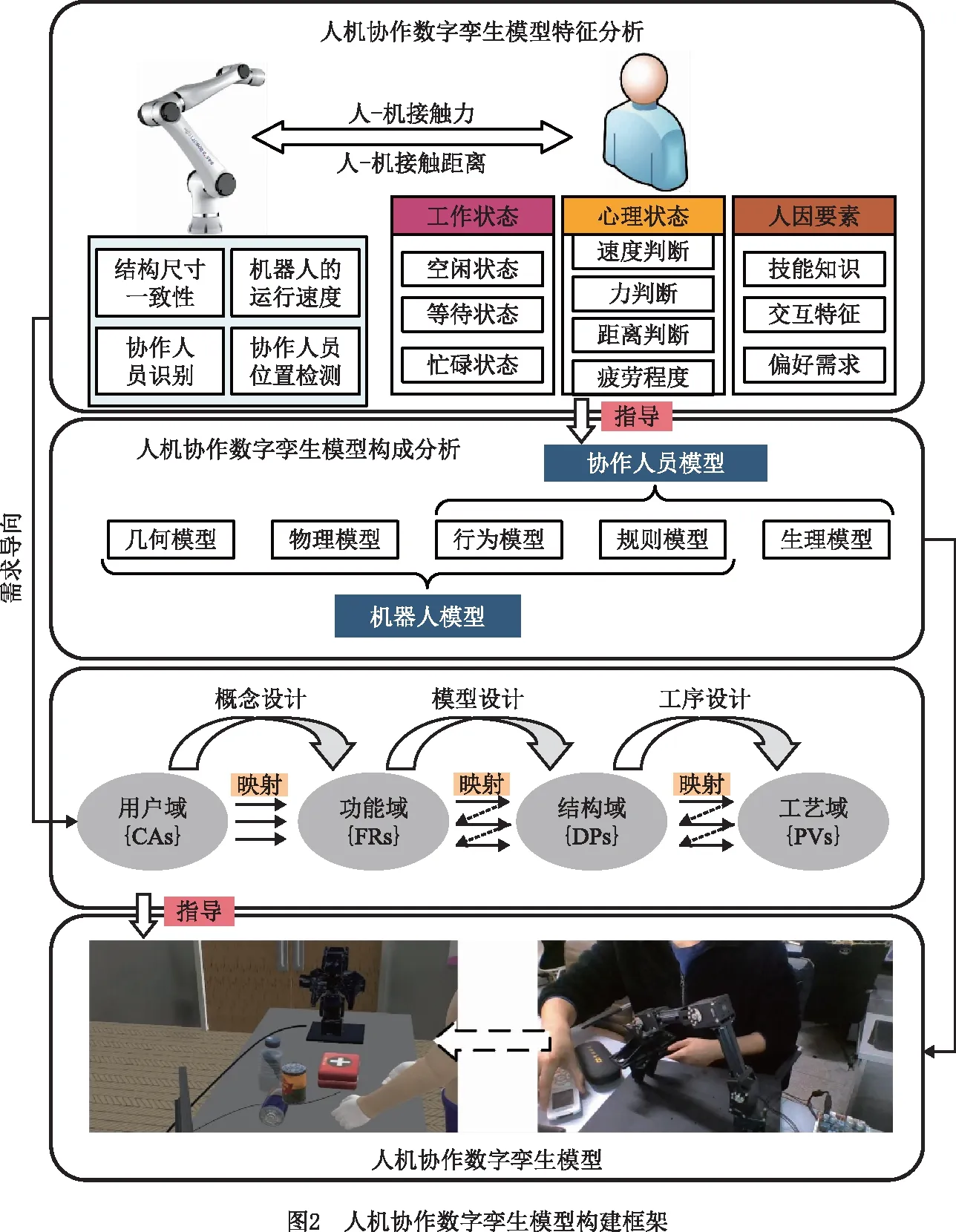
为建立以人为本的人机协作新范式,在对人机协作数字孪生模型的建模机理分析的基础上,提出人机协作数字孪生模型构建框架,如图2所示。
2.2 基于公理化设计的人机协作数字孪生模型建模技术
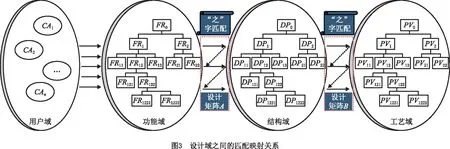
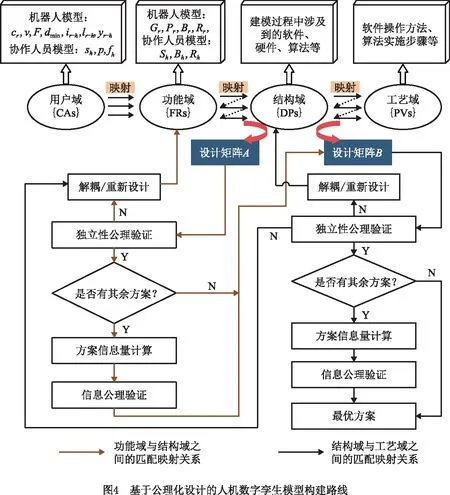
公理化设计将设计过程分为用户域(CAs)、功能域(FRs)、结构域(DPs)和工艺域(PVs)。用户域是指人机协作模型应该具备的属性,功能域是指人机协作模型为了满足这些用户需求而具备的功能模型,结构域是指构建功能域中功能模型所采用的方法,工艺域是指结构域中建模所用软件的操作方法[23],设计域的域间关系如图3所示。功能域与结构域、结构域与工艺域之间采用一种“之”字映射的匹配关系。以功能域和结构域为例,建模人员必须首先明确模型的总功能要求FR0,之后根据设计任务进行总功能分解,确定子功能要求FR1、FR2等,以此类推,直至分解到功能要求全部解决为止。结构域根据功能域的层次结构进行分解,总体设计参数DP0对应总功能FR0,子设计参数DP1对应子功能要求FR1等。整个设计过程自顶向下,由笼统到详细。
2.2.1 独立性公理验证
独立性公理是公理化设计中的一个判断准则,它是指FRs之间是相互独立的,每一个FRs都有唯一的DPs与之对应[24]。设计矩阵A和设计矩阵B用来判断设计域之间的匹配关系是否满足要求,域间的映射关系可用式(7)表示,即:
{FR}=[A]{DP}=[A][B]{PV}。
(7)
其中设计矩阵可以表示为:
(8)
在初步获得设计矩阵后,可能会存在一个FR与多个DP对应的情况。因此,需要对设计矩阵DM进行关联度分析,通过关联度分析可以检验模型功能结构与设计方法之间的匹配性。关联度分析要分别考虑FR对DP以及DP对FR的影响,即要分别以每个FR和DP为准则,将所有与该准则相关的DP和FR进行比较,利用层次分析法确定该准则的相对重要度,再综合所有的FR和DP,得到基于层次分析法的FRs-DPs比较矩阵[25]。
(1)以FR做基准时,基于层次分析法的FRs-DPs比较矩阵为:
(9)
(2)以DP做基准时,基于层次分析法的DPs-FRs比较矩阵为:
(10)
利用几何归一化计算公式对CM1和CM2进行计算,获得FRs与DPs之间的关联系数矩阵为:
(11)
式中:CMij的计算公式如式(12)所示:


(12)
利用式(13)所示的交角性(Reangularity)和式(14)所示的角相似性(Semangularity)来判断设计实例所有功能要求关联作用的程度[26]。设置关联度阈值为δ,只有当R≥δ且S≥δ时,功能结构与实现方法多级分解的关联作用可以忽略,否则不可忽略,需要对分解过程进行修改。
(13)

(14)
2.2.2 信息公理验证
当设计矩阵满足独立性公理时,由于功能实现方法的多样性,导致建模时往往存在多个方案,因而存在着建模方案优选的问题[27]。信息量最小公理是公理化设计中用来评判设计方案优劣的准则,它是指信息量最少的设计方案为最佳方案。基于信息公理的人机协作模型优选设计方案实施步骤如下:
步骤1确定人机协作数字孪生模型建模方案集T={T1,T2,…,Tk},评价指标集E={E1,E2,…,Ej},以及各评价指标对应的权重集W= {w1,w2,…,wq}。

ni(j)=[niL(j),niR(j)]=

(15)
若指标为越小越好型,则其规范化计算公式如式(16)所示:
ni(j)=[niL(j),niR(j)]=

(16)

步骤3计算评价指标的理想设计信息区间n0(j)。若评价指标越大越好,则评价指标j的理想设计信息区间序列的构建原则如式(17)所示:
n0(j)=[n0L(j),n0R(j)]=

(17)
若评价指标越小越好,则评价指标j的理想设计信息区间序列n0(j)的构建原则如式(18)所示:
n0(j)=[n0L(j),n0R(j)]=

(18)
步骤4建模方案与理想建模方案之间的邻近度计算。获得各评价指标的规范化系统信息区间ni(j)和规范化理想信息区间n0(j)后,则系统信息区间与理想信息区间的加权区间数欧式距离可表示为
(19)
则系统设计信息区间与理想设计信息区间的接近程度α(i,j)表示为
(20)
式中:α(i,j)的取值范围是[0,1],即当α(i,j)越大,建模方案与理想建模方案越接近。
步骤5评价指标j模糊区间信息量的计算。根据得到的邻近度计算建模方案关于评价指标的模糊区间信息量Ii(j),如式(21)所示:
Ii(j)=log2(exp(1-α(i,j)))。
(21)
步骤6建模方案i关于评价指标的模糊区间信息总量Ii∑。根据步骤5计算出设计方案关于单个评价指标的模糊区间信息量,则设计方案i关于q个评价指标的模糊区间信息总量计算如式(22)所示:
(22)
步骤7最优设计方案的确定。根据信息量最小公理,确定最优设计方案,如式(23)所示:
(23)
2.2.3 人机协作数字孪生模型建模路线
利用公理化设计理论进行人机协作数字孪生模型构建的具体实施方法如图4所示。根据公理化设计理论,首先需要确定用户域,即用户需求的人机协作数字孪生模型的属性。通过对人机协作数字孪生模型的建模机理分析,确定了机器人模型和协作人员模型的影响因素,即模型需要具备分析这些因素的能力。功能域中的总功能要求为人机协作模型的构建,在此基础上,对总功能进行分解得到两个子功能,即机器人模型的构建和协作人员模型的构建,再分别对这两个子功能继续分解,直至不能分解为止。得到分解好的功能需求后,在结构域中确定实现这些功能的方法,包括建模软件的选择、识别算法的设计等。最后,在工艺域中确定软件的操作方法和算法的实施步骤等。在该过程中,需要对设计矩阵A和B进行独立性公理和信息公理验证,最终得到经过公理验证的最优设计方案。
3 案例与验证
3.1 案例介绍
基于前述技术和方法,以人和桌面二夹指机器人之间的协作抓取任务为例,展开案例研究,如图5所示。具体的任务安排分为两种,第一种由协作人员将待抓物体传递给机器人,再由机器人放入指定位置,第二种则是由机器人从指定位置抓取物体,再传递给协作人员。以人机协作抓取数字孪生模型的构建过程为例,验证所提方法的可行性以及有效性。

3.2 方法验证
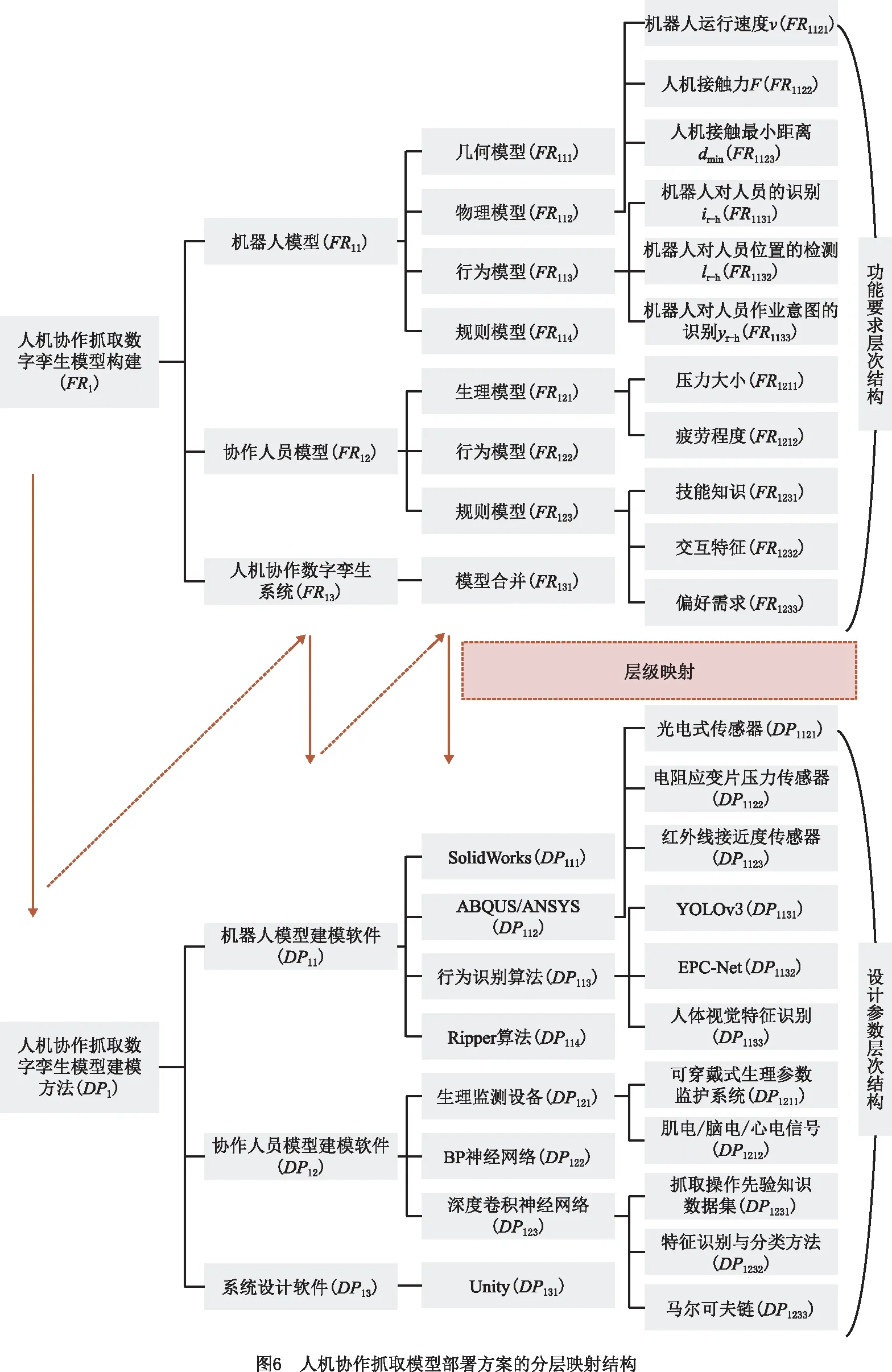
根据图4所示的建模路线,对人机协作抓取数字孪生模型进行构建,得到功能域和结构域的映射关系如图6所示。
3.2.1 人机协作抓取数字孪生模型独立性公理验证
由图6可得功能域和结构域之间的设计矩阵如式(24)所示:
(24)
式中:1表示有关联影响,0表示关联影响可以忽略。
根据文献[17]设置人机协作抓取数字孪生模型建模方案开发的关联度阈值δ= 0.75。对具有关联作用的功能要求和设计参数进行简化,如式(25)所示:
(25)
采用1~9比率标度对关联作用设计方程中的FR与DP进行评分,各标度的含义如表2所示。
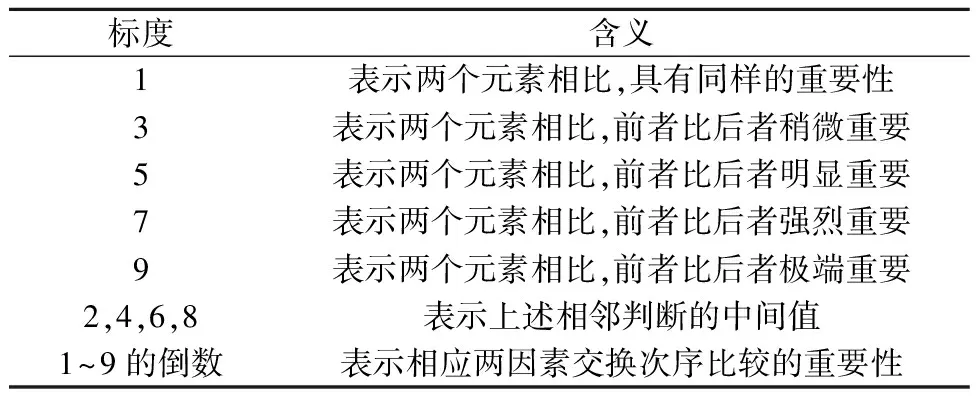
表2 标度表含义
根据表2对关联作用设计方程进行评分,结果如表3所示:
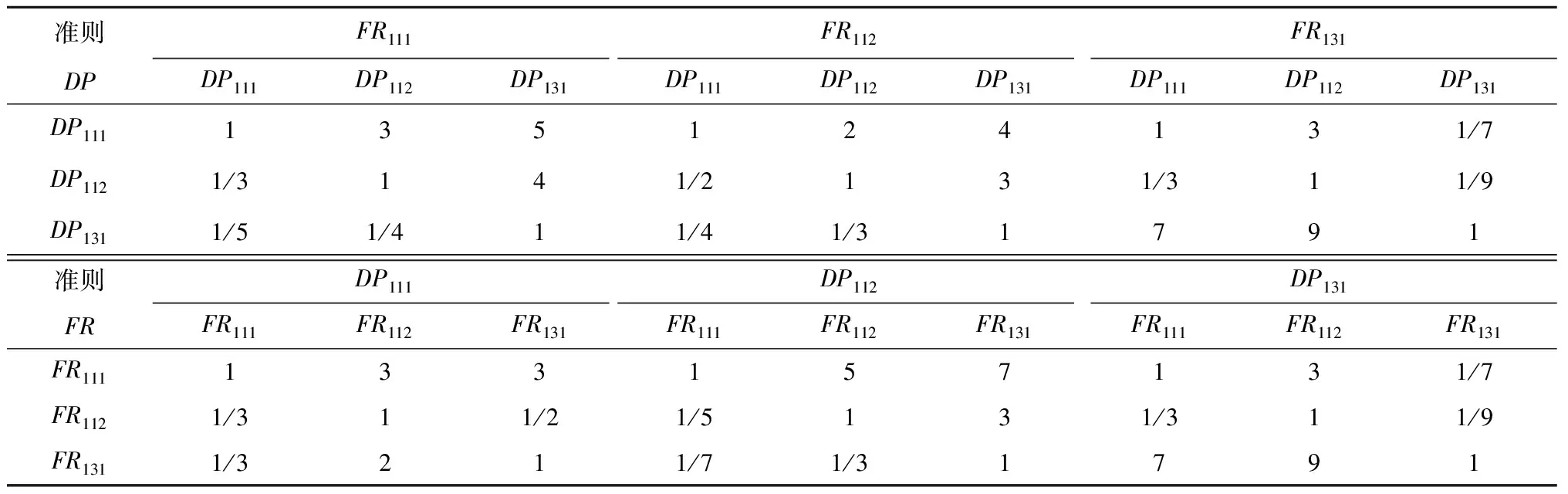
表3 判断矩阵
基于层次分析法并检验判断矩阵的一致性,得到以FR为基准的FRs-DPs比较矩阵如式(26)所示:
(26)
基于层次分析法并检验判断矩阵的一致性,得到以DP为基准的FRs-DPs比较矩阵如式(27)所示:
(27)
利用式(12)获得归一化后FRs-DPs之间的关联系数矩阵如式(28)所示:
(28)
利用式(13)和式(14)进行设计实例分解的关联作用计算,得到R=0.750 3,S=0.770 2。根据设置的关联度阈值δ,R和S都大于阈值。因此,图5所示的设计方案是一个满足独立性公理的可接受方案。用同样的方法,验证DP与PV之间的设计矩阵也符合独立性公理,属于合理设计。
3.2.2 人机协作抓取数字孪生模型信息公理验证
根据图4可知,当建模方案较多时,需要根据信息公理计算各个方案的信息量,并以信息量最小原则确定人机协作抓取数字孪生模型的最优建模方案。通过对人体疲劳状态的相关研究分析[28-31],确定了满足协作人员疲劳状态监测的3种方法,如表4所示。方案一、方案二和方案三分别代表肌电信号、脑电信号和心电信号,下面以这3种方案的信息量计算过程为例,验证所提方法的可行性和有效性。基于2.2.2节中的信息公理验证方法,计算3种方案信息量的实施步骤如下。
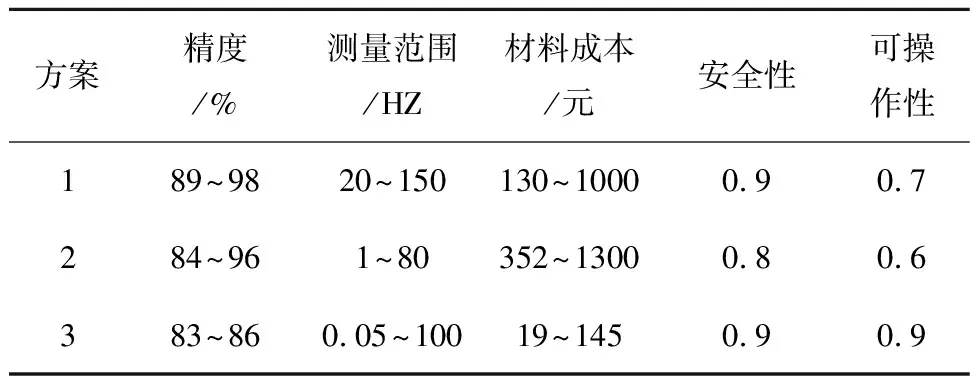
表4 建模方案评价指标参数
步骤1根据表4可得建模方案集T= {T1,T2,T3},评价指标集为E= {E1,E2,E3,E4,E5},利用表2构建评价指标的关联判断矩阵,计算得到相应的评价指标权重W= {0.519 1,0.035 5,0.236 0,0.075 7,0.133 7}。
步骤2获得建模方案对评价指标集的区间数评价矩阵P,如式(29)所示:
(29)
步骤3根据式(15)~式(16)分别对精度、测量范围、安全性和可操作性等指标和材料成本评价指标进行规范化处理,获得规范化后的区间数决策矩阵N,如式(30)所示:
(30)
由此根据式(17)~式(18)可以得到理想设计信息区间n0(j)为:
n0(j)=([0.908,1.000],[0.133,1.000],
[0.054,0.015],[1.000,1.000],[1.000,1.000])。
(31)
步骤4利用式(19)~式(20)获得系统信息区间与理想信息区间之间的接近度矩阵:
(32)
步骤5利用式(21)获得建模方案关于评价指标的信息量矩阵:
(33)
步骤6利用式(22)得到人机协作抓取建模方案集的信息总含量:
I∑=(0.065 0,0.122 8,0.314 7)。
(34)
步骤7根据信息量最小原则,可知方案1为最优建模方案,即采用肌电信号对协作人员的疲劳状态进行监测。
3.3 模型效果
通过公理化设计理论得到了人机协作抓取数字孪生模型的建模步骤及细节,首先在SolidWorks软件中构建基础的几何模型,之后在ABAQUS软件中进行有限元分析,最后导入Unity软件并添加相应的模型功能,得到人机数字孪生模型如图7所示。
其中,利用可穿戴式生理监测设备对协作人员的呼吸、体温、血压以及血氧饱和度进行监测,以此推断协作人员在工作过程中的心理健康状态。同时,通过对肌电袖套采集到的协作人员的肌电信号进行数据分析,判断协作人员的疲劳状态。最后,将得到的生理参数和肌电信号分析结果进行可视化显示,如图8所示,以实现对协作人员工作状态的实时监测。

4 结束语
本文面向以人为本的智能制造,提出一种人机协作智造的数字孪生建模方法。探讨了人机协作领域数字孪生模型的建模机理,从机器人模型和协作人员模型两个方面研究了人机协作领域应用数字孪生技术的特征与难点。分析了人机数字孪生模型在建模过程中的影响因素,在此基础上提出了人机数字孪生模型的基本组成结构。基于公理化设计理论,提出人机协作数字孪生模型的建模路线,并以人机协作抓取为案例,详细验证了所提建模方法。本研究工作强调“人”在协作任务中的重要性,充分考虑协作人员的心理状态和生理状态,在确保任务完成的前提下,尽可能地发挥人的主观能动性,为实现面向人本智造的人机协作新范式提供了支撑。
本文的研究重点是人机协作数字孪生模型建模方法的研究,对于涉及到的人机协作数据的采集方式、预处理算法以及交互方式等内容的研究是下一步的工作重点。模型和数据是数字孪生的核心,在得到人机协作数字孪生模型的基础上,如何通过人机协作数据实现对工作过程中协作人员危险等级的判断以及机器人运动轨迹的预测,是数字孪生技术在人机协作领域应用的难点。下一步研究团队将继续坚持以人为本的核心理念,开展人机协作新范式的研究,进一步推动人本智造的发展,为提升人类工作的安全感和幸福感而不断努力。