直升机“沙盲”现象研究进展
2023-12-04张卫国谭剑锋刘亚奎杨仕鹏王畅
张卫国,谭剑锋,刘亚奎,杨仕鹏,王畅
1.中国空气动力研究与发展中心 低速空气动力研究所,绵阳 621000
2.南京工业大学 机械与动力工程学院,南京 211816
0 引言
当直升机在含有大量沙尘等离散相颗粒的干燥环境中贴地飞行时,沙尘等颗粒被旋翼下洗流卷起,在直升机周围形成严重阻碍飞行员视线的沙云,产生直升机“沙盲(Brownout)”现象。各种布局形式的直升机均会产生“沙盲”现象。不同型号直升机形成的沙云有所不同,同型号的直升机在不同飞行姿态下形成的沙云也可能存在差异。沙云通常整体包裹直升机或环绕直升机分布(图1),严重威胁直升机飞行安全:1)弥漫于直升机周围的旋转沙云使飞行员无法准确判断直升机飞行姿态甚至产生错觉,极易采取错误的“纠正飞行状态”操作,诱发事故;2)沙云使飞行员无法有效收集地表实景信息,难以有效完成预定任务;3)沙粒磨损旋翼桨叶,堵塞发动机滤清器,严重降低直升机核心部件的使用寿命;4)扬起的沙尘会侵蚀机载航电设备,并与桨叶高速摩擦形成干扰电磁场,影响航电设备正常工作。

图1 V-22“鱼鹰”倾转旋翼机“沙盲”现象Fig.1 The brownout phenomenon of V-22 Osprey tiltrotor
“沙盲”作战环境是美军直升机作战(尤其是两栖作战或特种作战)的常规环境,是造成直升机损毁的重要风险因素。美国国防部航空安全技术报告指出:由“沙盲”导致的低能见度环境(Degraded Visual Environments,DVEs)引发了近乎半数的空军直升机坠机事故,同时也是美国陆军直升机损毁的主要因素[1]。伊拉克战争和阿富汗战争期间,美军直升机飞行事故中约75%由“沙盲”导致[2],如图2所示。美国国防部直升机生存力研究报告指出:在“伊拉克自由行动”(Operation Iraqi Freedom,OIF)和“持久自由行动”(Operation Enduring Freedom,OEF)中,若包含由“沙盲”引发的直升机撞击障碍物(如电线杆等)事故,则“沙盲”导致的直升机损毁数约占总损毁数的37%,导致的死亡人数约占总死亡人数的49%[3],直接经济损失达1 亿美元/年[4]。

图2 “沙盲”现象引发事故统计Fig.2 Statistic on accidents caused by brownout
2001—2008 年,由“沙盲”引发的事故导致美军损失了20 架直升机和50 名作战人员。此外,直升机非战斗损毁统计数据表明:130 架次直升机损毁中约有31 架次由“沙盲”导致,占总损毁数的24%[3],如图3所示。
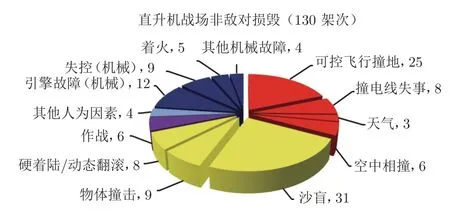
图3 非战斗损毁直升机统计数据[3]Fig.3 Statistic on non-combat damaged helicopters[3]
美军多军种联合开展了直升机沙尘环境安全着陆研究,陆军航空卓越中心专门成立了“沙盲”研究办公室,试图寻找解决“沙盲”问题的途径和技术。美国发布的《国防部作战试验鉴定局2021 财年报告》指出:沙尘天气或“沙盲”现象导致最新型CH–53K 重型直升机难以满足在低能见度环境下保持更高性能余量的作战要求,严重限制了该机型的飞行时间;“鱼鹰”倾转旋翼机也存在相同的问题。美国国防部直升机生存力研究报告强调:开展解决“沙盲”问题相关技术的研究非常必要且非常迫切。为此,美国海军与西科斯基飞行器公司成立了专门的工程突击团队,对CH–53K 重型直升机实施了更为完善的测试计划。
本文从直升机“沙盲”计算方法、试验方法、形成机理、抑制方法等4 个方面综述国内外相关研究进展。
1 直升机“沙盲”计算方法研究进展
直升机“沙盲”数值仿真有助于认识沙云的形成和演化规律,检验“沙盲”抑制技术的应用范围和使用效果。直升机近地干扰流场和沙粒复杂运动计算方法是直升机“沙盲”计算方法的核心。
1.1 直升机近地干扰流场计算方法
旋翼近地干扰流场是“沙盲”现象形成的源头,对近地干扰流场进行计算,是分析直升机“沙盲”现象的前提[5]。针对直升机近地干扰流场,早期研究者基于源或汇模拟旋翼,并通过镜像源或汇体现地面边界条件(图4),建立了模拟地面效应的镜面方法[6-7],但该方法未考虑旋翼尾迹与地面干扰影响。
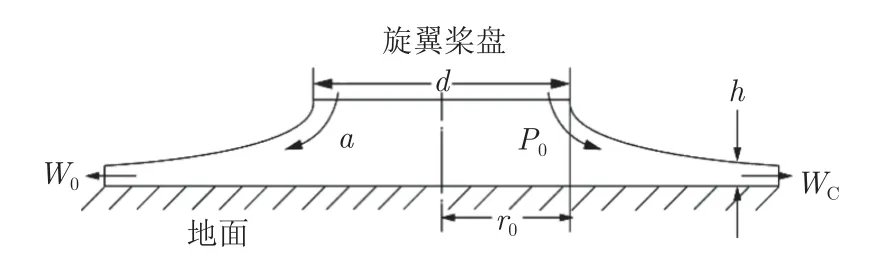
图4 基于源或汇的地面镜面方法[6]Fig.4 Surface mirror method based on source or sink[6]
Rossow[8]通过增加圆柱涡面,考虑了旋翼尾迹效应(图5)。基于叠加原理,何承健等[9]根据经典旋翼涡流理论和映像法计算了地面涡位置,并通过假定旋翼桨尖逸出的尾涡以涡圈形式随尾流移动来考虑旋翼尾流效应和卷起,但未考虑旋翼桨叶片数和尾流收缩效应。DuWaldt[10]通过采用连续畸变螺旋涡线模型,考虑了桨叶桨尖涡和尾流收缩效应影响,并采用镜像尾迹模型体现地面效应,但未考虑旋翼桨尖涡与地面的非定常干扰。Ferguson[11]和Preston[12]等耦合了动量理论和射流理论,通过试验数据估算地面效应修正因子,兼顾旋翼尾流收缩效应,建立了旋翼地面效应气动分析简化模型(图6),用于分析地面效应下的旋翼性能,但该方法需大量试验数据以获得修正因子,难以应用于构型复杂的直升机。
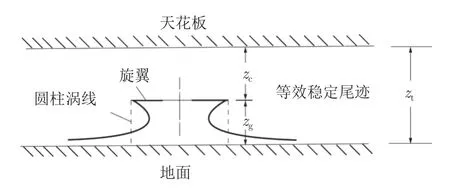
图5 基于圆柱涡面的尾迹效应模型[8]Fig.5 Wake effect model based on cylindrical vortex surface[8]

图6 基于动量理论和射流的尾流模型[11]Fig.6 Wake model based on momentum theory and jet flow[11]
涡方法从求解涡量运动方程和输运方程出发,能够直观反映旋翼桨尖涡与地面干扰的主要因素。该方法概念明确,计算速度快,已经广泛应用于直升机近地干扰流场研究。Wachspress 等[13-14]采用基于自由尾迹模型(free-wake)的CHARM 软件研究旋翼近地面干扰流场,以镜像模型模拟地面(图7),体现地面法向速度边界条件,但该方法未反映地面切向边界条件的影响,且难以应用于复杂地面。Keller[15]和辛冀[16]等耦合自由尾迹和面元法建立了旋翼/地面气动干扰模型,研究旋翼近地流场特性。D'Andrea[17]采用类似的面元–时间步进自由尾迹模型,开发了ADPANEL 软件,研究旋翼近地非定常流动现象,结果表明自由尾迹方法能够捕捉旋翼尾迹靠近地面的扩张特性(图8)。但上述方法均未考虑旋翼桨尖涡与地面的黏性效应。
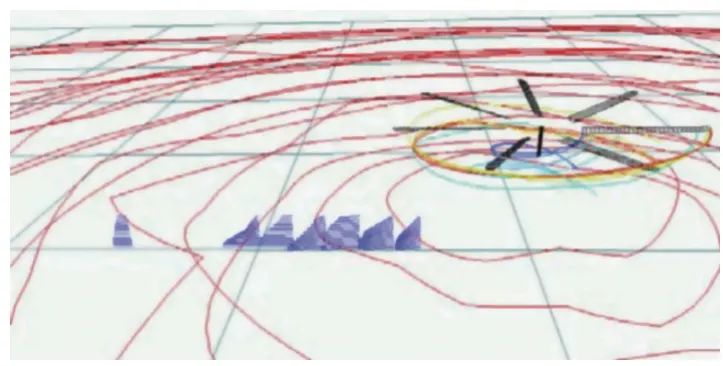
图7 CHARM 软件的地面镜面模型[14]Fig.7 Ground mirror model for the software of CHARM[14]
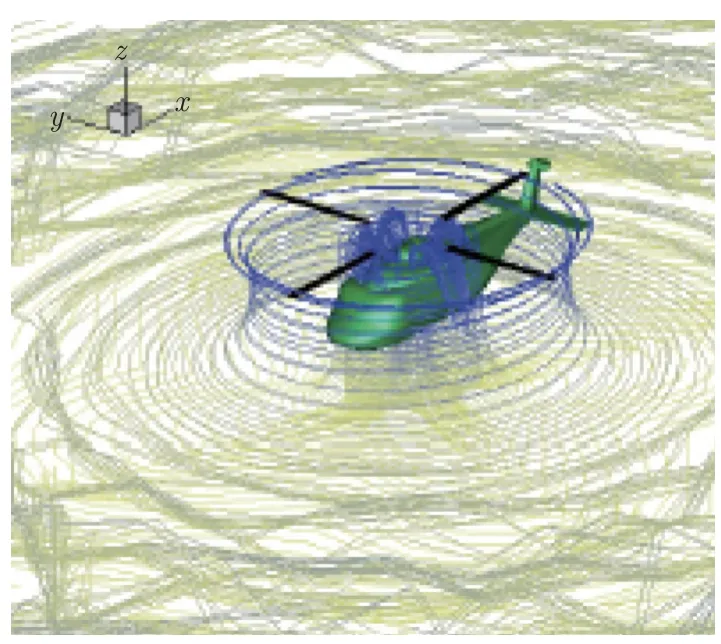
图8 ADPANEL 的地面面元模型[17]Fig.8 Ground surface element model of ADPANEL[17]
Phillips 等[18]建立了基于涡量的输运模型(Vorticity Transport Model,VTM)和无黏地面模型,研究旋翼近地复杂流动现象,结果表明直升机近地面干扰存在显著的非定常、非线性流动。马里兰大学Leishman 研究团队[19-20]采用时间精确自由尾迹模型和地面镜像模型(图9)研究旋翼近地面流场,结果表明直升机近地面干扰诱发旋翼桨尖涡缠绕,产生了复杂的三维、非定常地面流动。但上述方法仍未体现黏性对旋翼桨尖涡和地面流动的影响。

图9 直升机地面镜像模型[20]Fig.9 Ground mirror model of Helicopter[20]
针对上述问题,Zhao 等[21]基于拉格朗日体系,耦合升力线模型和黏性涡粒子法并嵌入地面镜像模型,研究了地面效应下CH–53E 直升机和XV–15 倾转旋翼机的旋翼流场。在研究中考虑了旋翼桨尖涡的黏性作用,但未考虑地面黏性效应。2018—2020年,谭剑锋等[22-24]建立了黏性地面模型(图10),耦合黏性涡粒子法研究BO105 通用直升机、CH–47D“支奴干”直升机等机型的近地面干扰流场特性,结果表明直升机与地面非定常干扰会诱发地面射流、上洗流及喷泉效应等,计算得到的流场特性与试验现象基本一致。
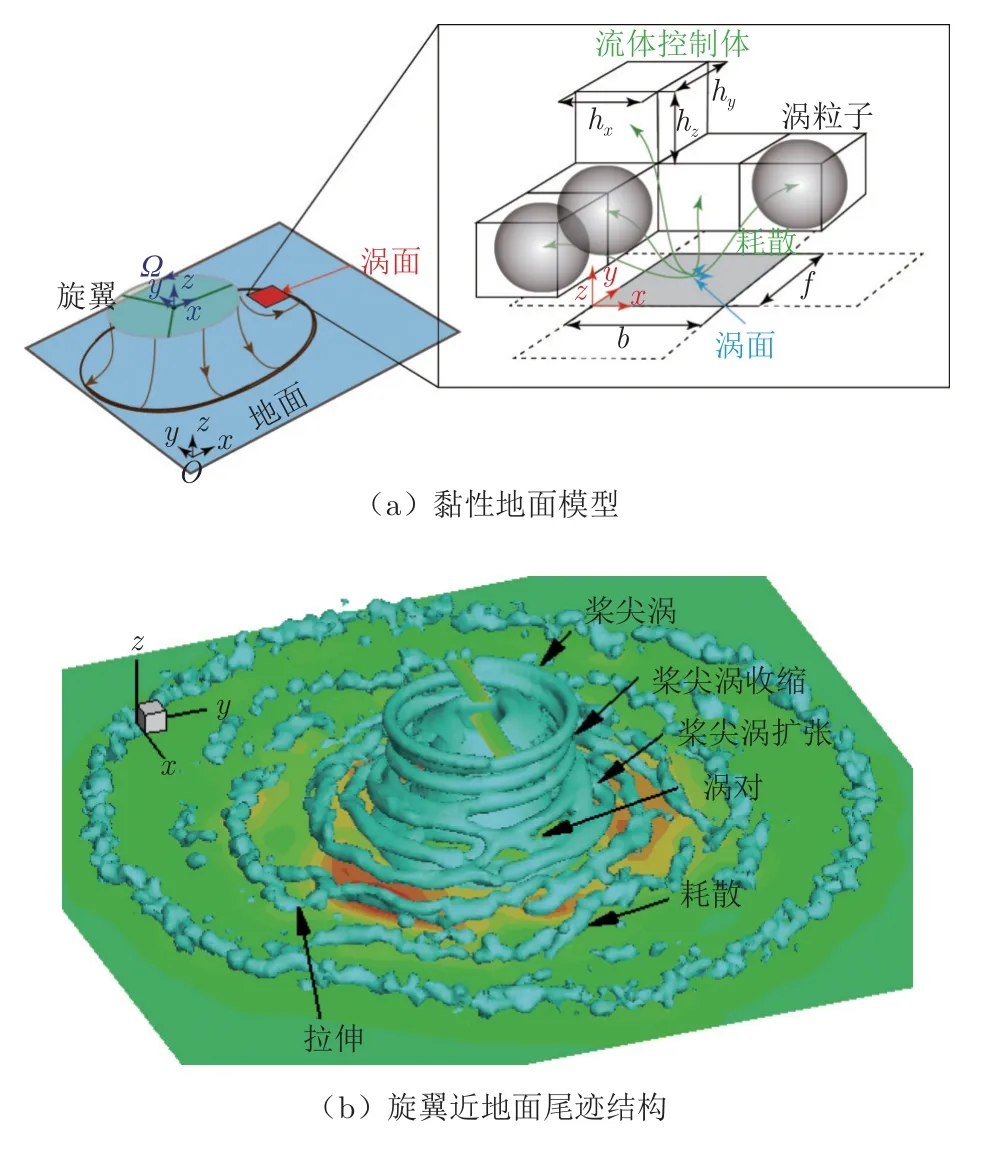
图10 黏性地面模型[23]Fig.10 Model of viscous ground[23]
上述研究表明,旋翼桨尖涡和黏性地面会显著影响直升机近地干扰流场,涡方法具备分析直升机近地面干扰诱发的地面射流、上洗流、喷泉效应、回流等复杂流动特性的能力。但是,基于涡方法的直升机近地面干扰流场分析方法未精确考虑地面黏性边界层,尚需进一步发展完善。
为了提高近地面复杂流场的模拟精度,研究者还采用CFD(Computational Fluid Dynamics)方法对旋翼近地面干扰复杂流场特性开展了研究。Ryerson 等[25]采用时间平均Navier-Stokes 方程数值模拟旋翼近地复杂流场,并应用于沙云数值模拟,但该方法中未包含模拟沙尘起跳的壁面随机湍流模型。Wenren[26]和Haehnel[27]等采用升力线模型和不可压缩CFD 求解器SAGE,耦合涡量加密技术,模拟直升机旋翼靠近地面的复杂流场。Wenren 等[28]采用CFD 和涡量增强技术研究了旋翼近地复杂流动现象。Thomas 等[29-30]采用CFD 软件OVERTUNS研究旋翼近地面干扰的流动特性,研究结果表明旋翼近地干扰流场高精度分析需要庞大的计算量,且存在旋翼桨尖涡数值耗散过快的问题。针对这一问题,Lakshminarayan 等[31]将自由尾迹与OVERTUNS耦合,通过GPU 加速器研究旋翼近地面干扰下的非定常流场特性,并叠加涡量追踪加密(Vortex-Tracking Grids,VTGs)技术,研究“沙盲”状态下的旋翼桨尖涡结构(如图11所示)。研究结果表明:靠近地面的桨尖涡时变特性对地面流场影响显著;为实现旋翼桨尖涡与地面干扰的高精度模拟,网格量需求巨大,计算周期超长。因此,在准确捕捉旋翼桨尖涡与地面边界层非定常干扰等方面,仍需开展进一步研究。
南京航空航天大学招启军、徐国华等[32-33]采用基于RANS 的CFD 方法和旋翼配平方程,研究了地面干扰下的旋翼诱导速度和地面涡特性。受数值耗散限制,地面干扰下的旋翼桨尖涡涡对发展与融合、地面射流等复杂流动尚待深入研究。Ramasamy等[34-35]采用基于 OVERFLOW 和 SAMARC 的Helios 软件,研究了CH–47D 直升机单旋翼与地面非定常干扰流场特性(图12),网格量高达4.5 亿。研究结果显示:对于“沙盲”现象所关注的旋翼与地面复杂流场,即使旋翼旋转35 圈之后,旋翼复杂的启动涡系仍然存在,且地面射流范围仍未达到5 倍旋翼直径。因此,虽然采用多种技术的CFD 方法能够实现旋翼近地面干扰流场模拟,但需面临CFD 方法计算量庞大和数值耗散等问题。2017—2021年,Rovere 等[36]采用CFD 软件HMB3 研究了直升机与地面、建筑的干扰流场,结果表明旋翼近地面干扰诱发了显著的地面射流,且旋翼桨尖涡与地面的非定常干扰显著改变了近地流场。

图12 采用Helios 软件计算的旋翼近地面干扰流场[35]Fig.12 Interference flow field of rotor near ground resolved by Helios[35]
经过几十年发展,CFD 方法已经可以实现旋翼流场的高精度模拟,但由于存在旋翼桨尖涡与地面边界层非定常干扰的影响,旋翼与地面非定常干扰流场的计算精度仍然受到数值耗散和网格数量等因素的限制。此外,针对直升机贴地飞行“沙盲”现象的计算分析,还需额外考虑起伏不平、时变的沙床表面,以及沙床近壁边界层脉动湍流对旋翼与地面非定常干扰流场的影响。
1.2 “沙盲”计算方法
直升机“沙盲”现象呈现为沙粒的复杂动力学行为。在旋翼与近地面非定常干扰流场作用下,沙床表面沙粒迁移、聚集、起跳、扬起,形成沙云,沙云在旋翼流场作用下悬浮、回流,最终导致“沙盲”。
将前述基于涡方法的直升机近地面干扰流场计算方法与沙粒动力学计算方法耦合,研究者开展了直升机“沙盲”数值计算方法研究。Wachspress[14]、Keller[15]和Whitehouse[37]等将基于自由尾迹和面元法的旋翼/地面气动干扰模型与沙粒运动模型,以及可视化模型LDTRAN(Lagrangian Deposition and TRajectory ANalysis)耦合(图13),研究直升机“沙盲”现象。

图13 LDTRAN 模型[15]Fig.13 LDTRAN Model[15]
美国陆军将LDTRAN 用于分析沙云对旋翼飞行器飞行通道的影响。LDTRAN 的核心是判断地表不同类型沙粒扬起的条件。采用与大气运动学研究中类似的方法,引入地表粗糙度,假设地表沙粒分布高于地面的特征位移厚度。当特征位移厚度高度位置的水平速度足以克服沙床表面沙粒的滑动摩擦力时,沙粒将被扬起,扬起条件为:
式中:Cd为沙粒的阻力系数,dp为沙粒直径;u 为沙粒和空气相对速度大小,由旋翼/地面气动干扰模型计算;µ为静摩擦系数;ρ为空气密度;ρp为沙粒密度;g 为重力加速度大小。研究结果表明上述方法可模拟直升机“沙盲”现象,但该方法未考虑沙粒摩擦和碰撞特性。D'Andrea 等[17,38]耦合基于面元–时间步进自由尾迹模型的ADPANEL 软件和粒子输运模型(Particle Transport Model,PTM),研究了EH–101 直升机和纵列式直升机的“沙盲”特性(图14)。
图14 ADPANEL-PTM[17]Fig.14 ADPANEL-PTM[17]
PTM 模型针对单个沙粒基于拉格朗日方法和牛顿第二定律建立运动方程,并假设重力和流体阻力是沙粒运动中的主要作用力:
式中:mp、vp、Ap、F分别为沙粒的质量、速度、横截面积和所受合外力。
采用二阶精度时间格式求解方程(2)和(3),可以得到沙粒在流场中的运动轨迹,设定输沙率,即可模拟沙粒从地表扬起的过程。Marticorena 和Bergametti[38]认为:沙床表面速度超过沙粒扬起的最低速度阈值时,沙粒将进入流场。Bagnold 提出了根据沙粒特性估计该速度阈值的简单表达式:
式中,vt为沙粒扬起的速度阈值,A=0.110 9,β=3×10-4N/m。Iversen 和White 开展了大量实验,验证了该式的正确性。
Phillips 等[39]耦合涡量输运模型VTM 和粒子输运模型PTM 研究了旋翼的“沙盲”现象。基于牛顿第二定理和Eulerian 体系建立了沙粒动力学方程:
式中:v 为沙粒相对地表的运动速度;vg为沙粒在重力作用下的沉降速度;νp为沙粒扩散常数;ρm为沙粒质量浓度(文中简称“沙尘浓度”);Sp为从沙床表面进入流场的沙通量。
上述方法采用基于经验的沙通量简化沙粒扬起过程,但其中未考虑沙粒起跳真实特性等因素。Leishman 研究团队[40-43]采用时间精确自由尾迹模型和地面镜像模型耦合沙粒输运方程的沙粒动力学模型(图15)模拟直升机“沙盲”现象。沙粒输运方程的动力学模型以BBO(Basset–Boussinesq–Oseen)方程为基础,忽略Basset 力、浮力、附加质量力和升力(假设除了重力和阻力,其他力的大小跟空气密度与沙粒密度的比值成正比),则动力学模型为:
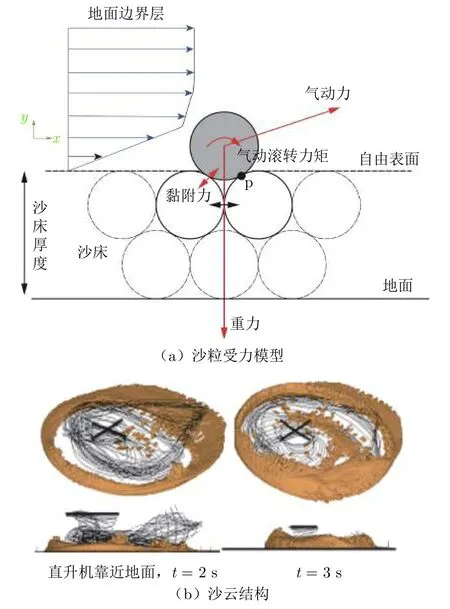
图15 基于沙粒输运方程的沙粒动力学模型[43]Fig.15 Model of sand particle dynamics based on sand particle transport equation[43]
该方法采用了基于经验的Bagnold 沙粒扬起速度阈值模型(式(4))和沙粒摩擦速度阈值模型(式(1)),并嵌入了Shao 等[44]的沙粒夹带和起跳概率模型。与PTM 等方法相比,该方法考虑了沙粒夹带和起跳因素,能够较好地模拟直升机“沙盲”轮廓。研究结果表明[40-43]:沙粒运动轨迹受旋翼桨尖涡和飞行姿态的影响明显;在直升机机动状态下,旋翼近地面干扰的非定常尾迹结构会显著影响沙云特性。
但是,该方法采用基于经验的假设模型对沙粒迁移、起跳和夹带过程进行模拟,沙粒动力学方程计算量庞大,降低了直升机“沙盲”数值模拟效率。Govindarajan 等[45]采用Gaussian 方法、k 均值方法和Osiptsov’s 方法等聚类方法,将局部沙粒集聚并当量化为一个等效沙粒簇,降低沙粒动力学方程求解量,提高直升机“沙盲”数值模拟效率。Hu 等[46]将聚类方法与快速多极子方法FMM(Fast Multipole Method)和GPU 并行算法耦合,提高了“沙盲”数值模拟效率,但存在由沙粒集聚当量化所导致的沙粒轨迹累积误差,且计算效率与计算精度呈反比。谭剑锋等[47-48]将黏性涡粒子法与离散单元法(Discrete Element Method,DEM)耦合,建立了直升机“沙盲”数值分析方法(图16),用于模拟直升机贴地飞行和着陆–起飞状态下的“沙盲”现象。
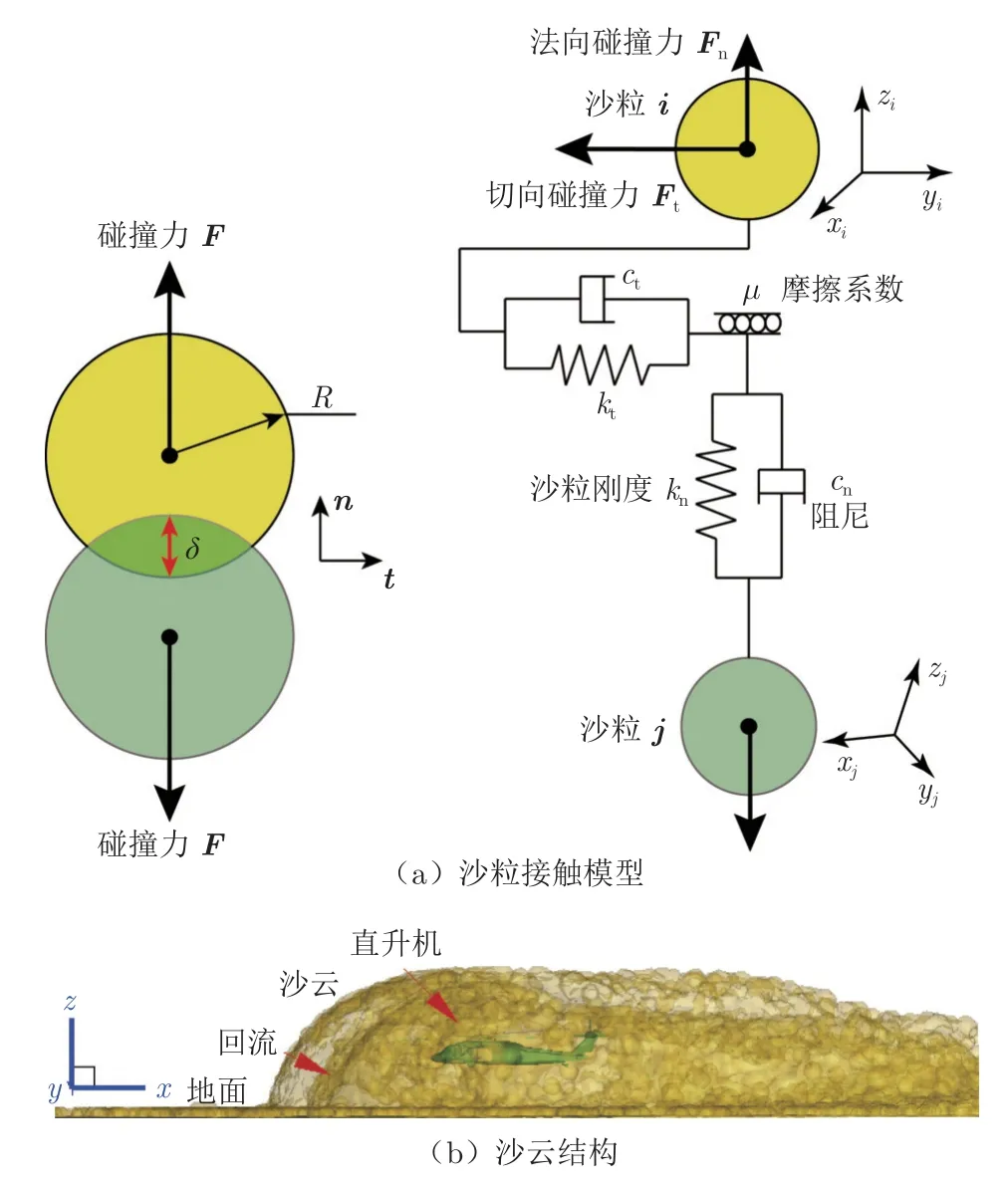
图16 沙粒DEM 模型[47-49]Fig.16 Sand particle DEM model[47-49]
根据离散单元法DEM[17-18],计算得到沙粒复杂运动轨迹和沙云空间形态,沙粒动力学模型为:
式中:mp和vp为沙粒质量和速度;I 和ωp为沙粒惯量和角速度;Fi、Fg为沙粒内部力和沙粒重力,Ff为旋翼近地面干扰流场和侧风对沙粒的气动力;T 为沙粒受到的力矩。


采用以上方法模拟的“沙盲”轮廓与飞行测试结果较为吻合。研究结果表明[47-48]:旋翼桨尖涡、地面涡主导的直升机近地面流场诱发沙粒扬起,最终形成了直升机“沙盲”现象。此外,谭剑锋等[49-50]还提出了背景网格映射–分裂加速计算技术(Background Mapping-Splitting method,BMS),显著提升了直升机“沙盲”数值模拟效率,但方法尚未考虑近壁湍流脉动起沙特性。
与涡方法相比,采用CFD 方法可提高直升机近地干扰流场计算精度。众多研究者将CFD 方法与沙粒动力学计算方法耦合,研究直升机“沙盲”现象。Ryerson[25]、 Wenren[26]等将不可压CFD 求解器SAGE 与沙粒输运模型耦合,研究直升机“沙盲”现象。假设沙粒为连续流场,并考虑沙粒重量和受到的阻力,基于Eulerian 体系建立如下沙粒连续方程:
式中:qf为空气速度场,qp为沙云颗粒流;adrag为颗粒流在旋翼流场中所受阻力作用下产生的加速度,agrav为颗粒流的重力加速度。该方法假设沙云为连续场(图17),未考虑沙粒的稀相特性。
图17 沙粒连续场模型[26]Fig.17 Sand particle continuous field model[26]
Haehnel 等[27]将不可压CFD 求解器Rot3DC 和沙粒夹带–色散(Particle Entrainment and Dispersion,PED)模型耦合,模拟直升机近地面“沙盲”。PED 模型包括沙粒由地面扬起的夹带模型及在流场中运动的色散模型,沙粒运动方程表述为对流–扩散方程:
式中:u∗,t为摩擦速度阈值,可由Bagnold 模型或Shao 等的模型得到;f 为质量分数。
上述方法将沙粒夹带过程简化为与边界条件和稳定质量通量相关的函数,未考虑沙粒真实的夹带过程和起沙过程。Thomas 等[29]将CFD 软件OVERTURNS 和Leishman 研究团队开发的拉格朗日沙粒跟踪方法耦合,并采用自由尾迹–CFD 混合方法和GPU 加速方法降低直升机近地面“沙盲”现象模拟计算量[30]。德国宇航中心DLR 的Kutz 等[51]将DLR 开发的CFD 软件FLOWer 与拉格朗日沙粒跟踪方法耦合,研究直升机近地面“沙盲”现象。Barakos 等[52]将CFD 软件HMB3 与粒子输运模型PTM 模型耦合,研究直升机“沙盲”现象。上述研究结果表明:耦合CFD 与拉格朗日沙粒跟踪方法可以较好地分析直升机“沙盲”现象和沙云轮廓。但上述方法均采用基于经验的Bagnold 沙粒扬起速度阈值模型、沙粒摩擦速度阈值模型及Shao 的沙粒夹带和起跳概率模型,并未考虑沙粒迁移、聚集和起跳等真实过程,在分析直升机“沙盲”形成过程方面仍存在不足。
胡健平、徐国华等[53-54]等采用CCM+软件和离散动力学EDEM 软件模拟由不同粒径沙粒构成的直升机沙云形状,开展了全尺寸直升机“沙盲”现象初步研究(图18)。通过分析沙云中的沙粒粒径分布(图19)发现:在直升机近地干扰流场作用下,质量较小的细微沙粒(粒径1~10 µm)扬起高度和数量均随时间逐渐增大,是沙云的主要成分;而大尺寸沙粒(粒径100~1 000 µm)受到重力影响,主要表现为近地表跃移。受庞大计算量的限制,计算的沙粒数量较少,未能体现沙粒迁移、聚集、起跳和扬起等过程,也未考虑近地面湍流脉动起沙特性。
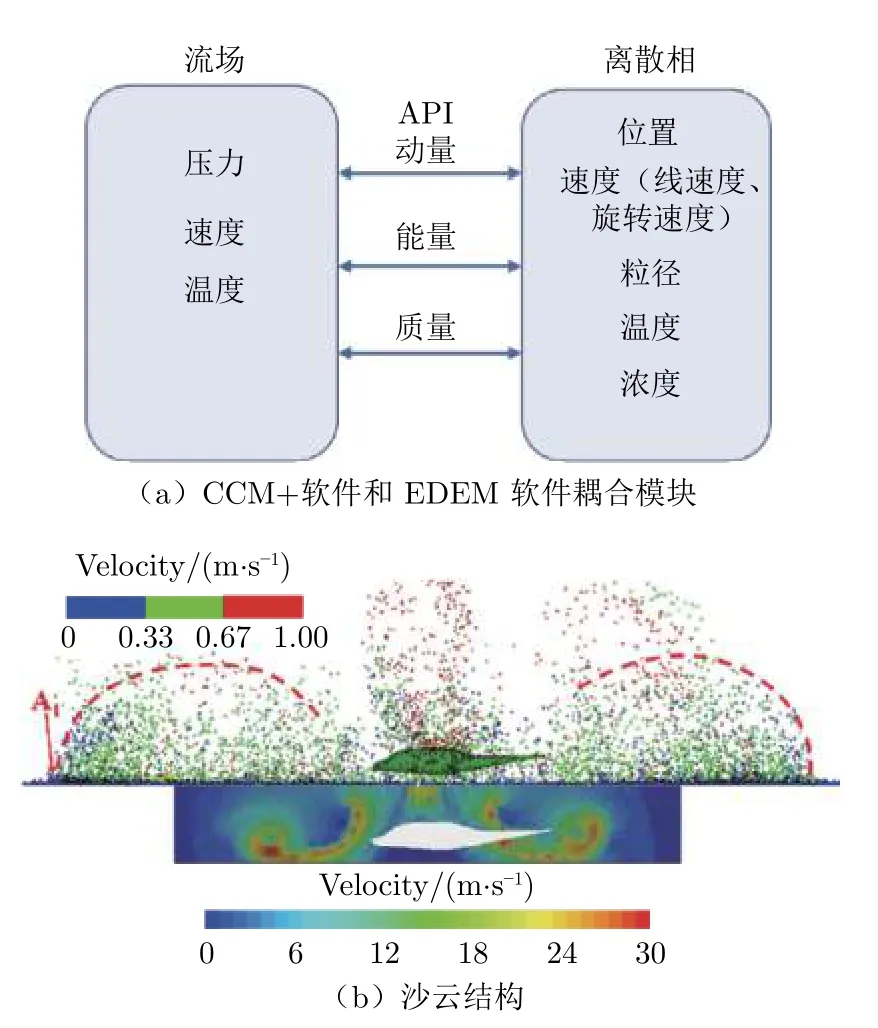
图18 CFD 与EDEM 耦合模型[53]Fig.18 Coupled model of CFD and EDEM[53]

图19 直升机“沙云”中的沙粒直径分布[53]Fig.19 Distribution of sand radius in helicopter dust cloud[53]
Porcù等[55]耦合基于半隐式欧拉方程的沙粒运动模型和预先计算的流场,嵌入MPI 和GPU 并行技术,以提高“沙盲”数值模拟效率。基于牛顿定理(F=mpap),采用半隐式Euler 格式求解沙粒轨迹:

上述方法忽略了沙粒的接触碰撞,未考虑沙粒的扬起过程。由于沙粒–沙粒接触碰撞、沙粒–地面接触碰撞会改变沙粒运动特征和沙云形成特性,增加了聚类方法的累积误差和“沙盲”数值模拟计算量,给聚类方法和基于MPI 和GPU 的并行方法带来了较大挑战。
1.3 沙尘浓度预测
Whitehouse[14,37]、Keller[15]等采用基于物理视觉的渲染模型来表征直升机“沙盲”现象中的沙尘浓度对飞行员视野的影响。该模型基于单点散射,考虑沙粒簇对光线的散射、吸收等效果。采用高斯分布函数计算沙尘浓度:
式中:N、r、σ分别为沙粒簇的沙粒数量、半径和扩散系数。
该方法主要从视觉角度考虑沙粒簇的影响,未反映沙尘浓度。Haehnel 等[27]将“沙云”当量化为颗粒流场而非沙粒离散体。沙粒颗粒浓度ϕp满足如下方程:
该方法可以将沙粒颗粒浓度与旋翼流场、沙云模拟直接耦合,但未考虑沙粒的离散特性。
Leishman 研究团队[40-43]采用拉格朗日沙粒跟踪方法求解单个沙粒的空中运动轨迹,而后求出空间体积内的沙粒数量,进而定义直升机飞行员视觉区域内的沙尘浓度。在直升机着陆过程中,飞行员无需全方位视野,仅需较小的清晰视野(Field of View,FOV)。如图20所示,飞行员聚焦视野区可在驾驶舱视野区移动扫掠,在任一聚焦视野区内若能清晰观测地面(沙尘浓度较低、能见度较好),直升机即可安全着陆或起飞。为此,直升机飞行员聚焦视野区的沙尘浓度ρp可用直升机航向的单位偏航角ϕp和单位俯仰角θp所形成的视觉区域扫掠体积内的沙粒数np(ϕp,θp)定义:
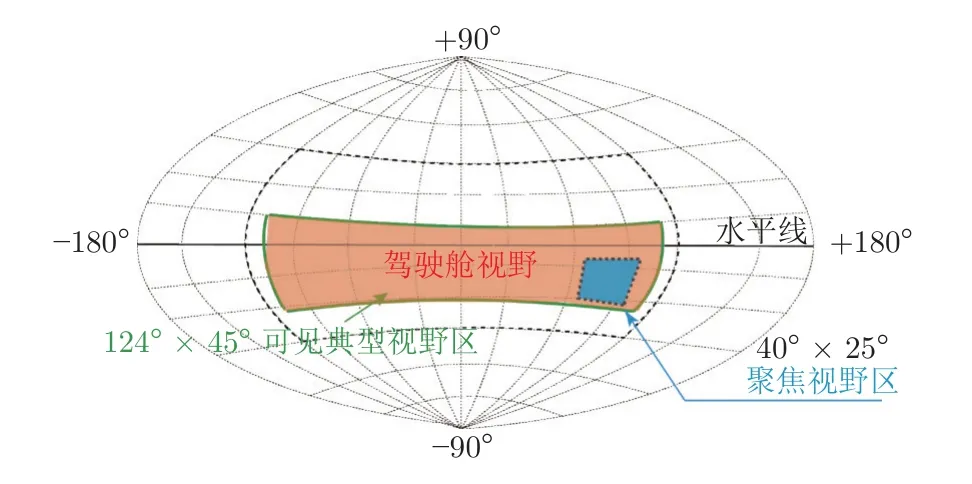
图20 直升机驾驶舱视野区域Fig.20 Pilot’s view of helicopter
地面沙粒并不影响飞行员视野,只有扬起的沙尘才会影响,因此沙尘浓度仍需考虑沙尘扬起因素。谭剑锋等[56]将沙尘浓度ρp定义为扫掠的飞行员聚焦视野区内沙粒数量的最小值与扬起沙粒数量的比值:
式中:-21° ≤ i ≤ -1°,-62° ≤ j ≤ 22°;ns为位于飞行员双目位置极坐标夹角θs和ϕs的单位视角范围内的沙粒数量(图21);Ns为扬起沙粒数量。

图21 飞行员视野坐标Fig.21 Frame of pilot’s view
通过直升机“沙盲”计算方法得到沙粒空间运动轨迹,采用上述“沙盲”浓度预测模型得到直升机驾驶员视觉区域的沙尘浓度,继而判断沙尘对飞行员视觉区域的影响,并应用于直升机悬停、前飞、着陆–起飞和侧风状态下直升机周围空间沙尘浓度分布的预测。
经过近20年发展,目前的直升机“沙盲”计算方法主要由基于涡方法或CFD 方法的直升机近地面干扰流场计算方法和拉格朗日沙粒跟踪方法耦合构成,优点如下:
1)基于涡方法的直升机“沙盲”计算方法能够较好地捕捉近地面的旋翼桨尖涡缠绕、地面射流、上洗流等复杂流场特性。
2)基于CFD 方法的直升机“沙盲”计算方法能够较好地捕捉“沙盲”现象所关注的旋翼近地面干扰产生的复杂流场和启动涡变化结构。
3)耦合拉格朗日沙粒跟踪方法和涡方法(或CFD 方法)的直升机“沙盲”计算方法均能模拟沙粒空间运动轨迹、沙云轮廓和“沙盲”现象。
目前的研究方法还存在以下不足:
1)基于涡方法的直升机“沙盲”计算方法仍未能精确模拟地面的黏性边界层,也未考虑复杂沙床结构和近壁边界层湍流脉动。
2)基于CFD 方法的直升机“沙盲”计算方法也未能较好地考虑复杂沙床结构和近壁边界层湍流脉动,且存在旋翼桨尖涡数值耗散偏大、计算量庞大等问题。
3)耦合拉格朗日沙粒跟踪方法和涡方法(或CFD 方法)的直升机“沙盲”计算方法均采用了基于半经验的沙粒夹带模型、沙粒起跳模型及基于速度阈值的沙通量模型计算沙粒扬起过程,未能较好地体现沙粒迁移、聚集和起跳等过程和沙云形成发展过程。
2 直升机“沙盲”试验方法研究进展
直升机“沙盲”现象具有复杂的非定常性和多相流特点,数值模拟难以完全体现其全过程特征。“沙盲”试验是研究“沙盲”现象的另一个重要手段,可以加深对直升机“沙盲”现象机理的认知,辅助物理模型的建立,验证计算方法的准确性,以及评估直升机“沙盲”的程度等。
2.1 直升机近地干扰流场试验
Saijo 等[57]采用烟流、丝线、纹影等手段,在风洞及外场飞行环境下测量了直升机近地面飞行产生的回流、上洗流及地面涡等大尺度流动结构(图22),并由此形成了对流场结构形态与演化过程的宏观认识(图23)。
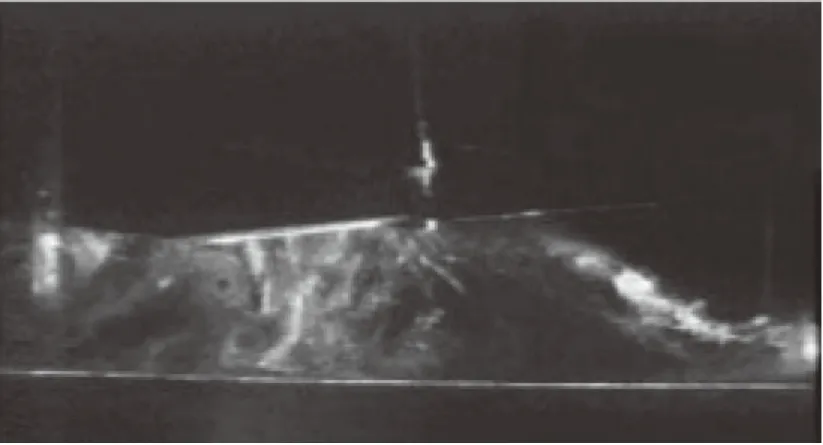
图22 旋翼近地面干扰流场的风洞试验[57]Fig.22 Wind tunnel test of interference flow field of rotor near ground[57]
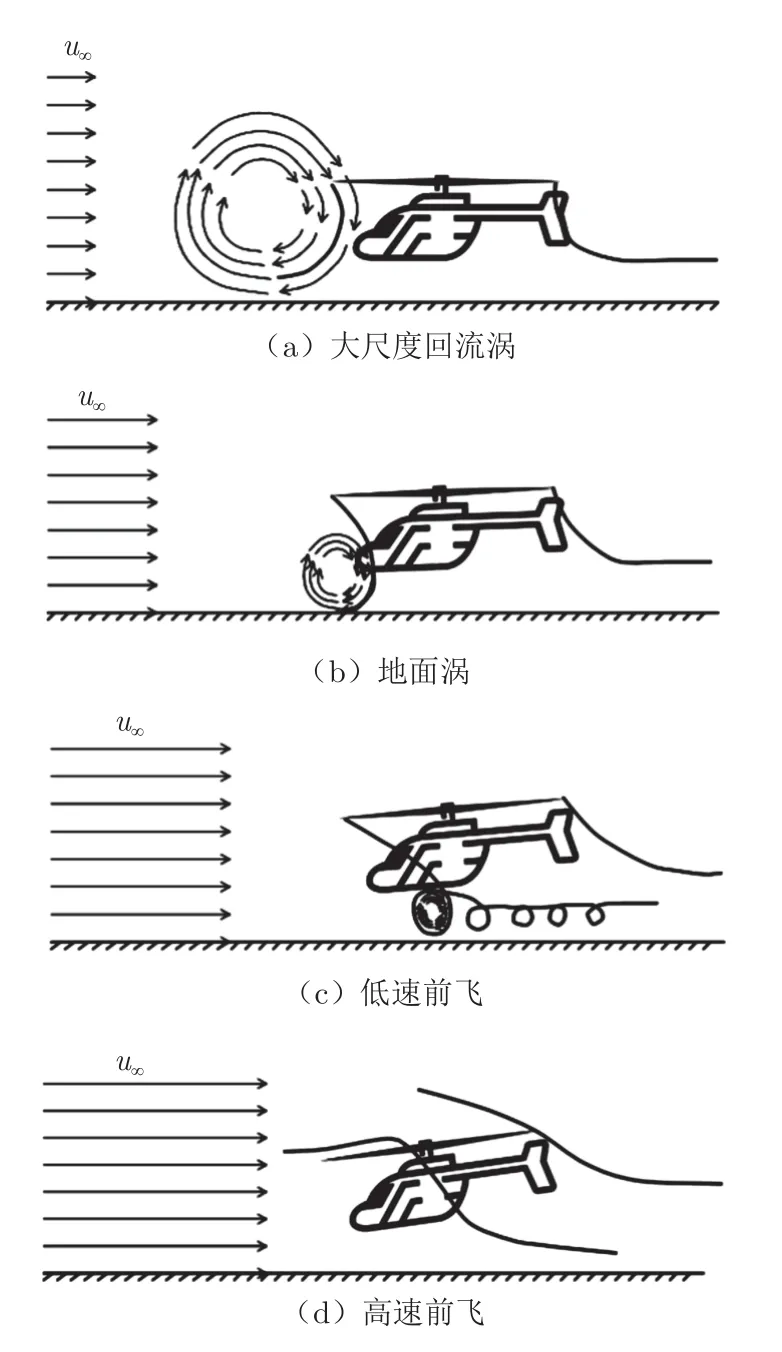
图23 旋翼近地面干扰的宏观流动[57]Fig.23 Macroscopic flow of rotor and ground interference[57]
随着旋翼流场高空间解析度和高时间分辨率测量技术的进步,研究者开展了旋翼尾流的近地面流场时空演化细节研究,为直升机“沙盲”试验奠定了流场测试技术基础。格拉斯哥大学的Nathan[58]和马里兰大学Leishman 研究团队[5,59-60]采用高速摄影和PIV 技术开展了不同离地高度悬停状态下的小直径旋翼流场试验研究,如图24(a)和图25(a)所示。研究结果表明,近地面的流场演化由旋翼桨尖涡及旋翼下洗流、地面和涡系的自诱导作用行为主导,如图24(b)和图25(b)所示。在地面压缩效应作用下,桨尖涡涡量增强并融合,涡核扩张,桨尖涡之间互诱导生成非周期性的涡对,桨尖涡冲击地面产生次生涡结构和分离气泡(图26),显著增大了地面射流和剪切应力强度。此外,对地面的非定常压力场测量结果表明,除旋涡、湍流在地表直接产生的剪切夹带作用外,旋涡运动产生的负压场也对地表沙尘产生了向上的作用力。

图24 旋翼近地面干扰流场结构[58]Fig.24 The structure of rotor and ground interference flow field[58]
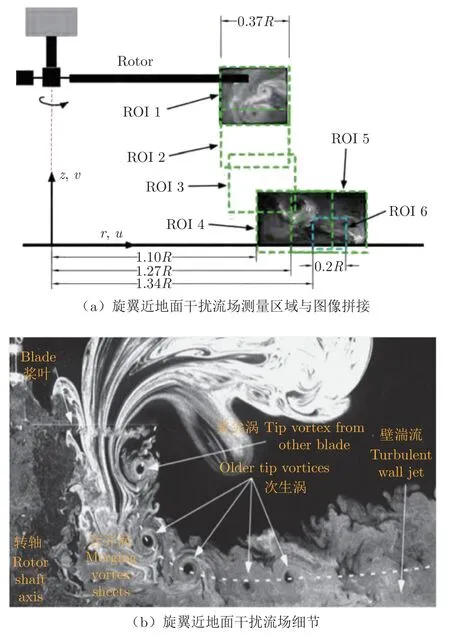
图25 悬停状态下的旋翼近地面干扰流场试验研究[5]Fig.25 Experimental studies of interference flow field of hovering rotor and ground[5]
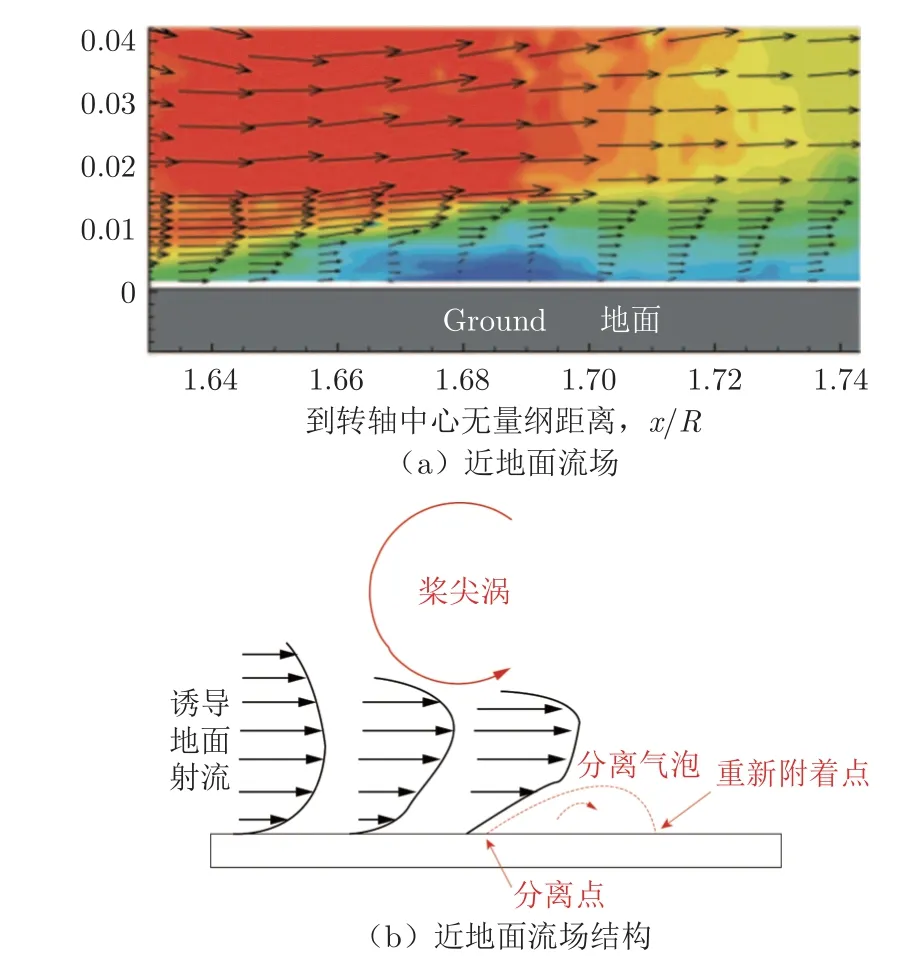
图26 桨尖涡冲击地面产生的次生涡结构和分离气泡[60]Fig.26 Secondary vortex structure and separation bubble generated by the hitting process of blade tip vortex and ground[60]
2.2 直升机“沙盲”试验
Rodgers[61]针对H–21 纵列式直升机开展了悬停状态下的“沙盲”试验(图27)。Whitehouse 等[37]和Nathan 等[62]开展了旋翼模型“沙盲”试验,测试了“沙盲”状态下的能见度,但未测量沙粒运动轨迹和流场特性(图28)。Leishman 研究团队[60,63-65]采用高速PIV 的单相流和两相流测试技术开展了直升机“沙盲”试验(图29),研究了小尺寸旋翼模型“沙盲”状态下的沙粒扬起过程及地效下旋翼涡系结构对沙粒扬起的作用过程。研究结果表明:在地面影响下,旋翼桨尖涡发生了拉伸和融合,表现出高度的三维非定常特性,导致沙粒产生聚集、碰撞、起跳和悬浮等复杂运动(图30)。
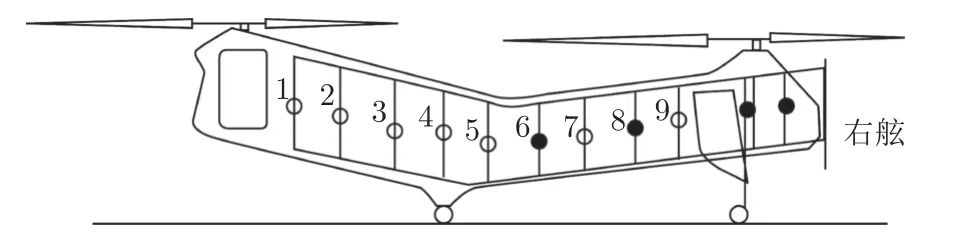
图27 H–21 直升机“沙盲”试验[61]Fig.27 Experiment of brownout with H–21 helicopter[61]
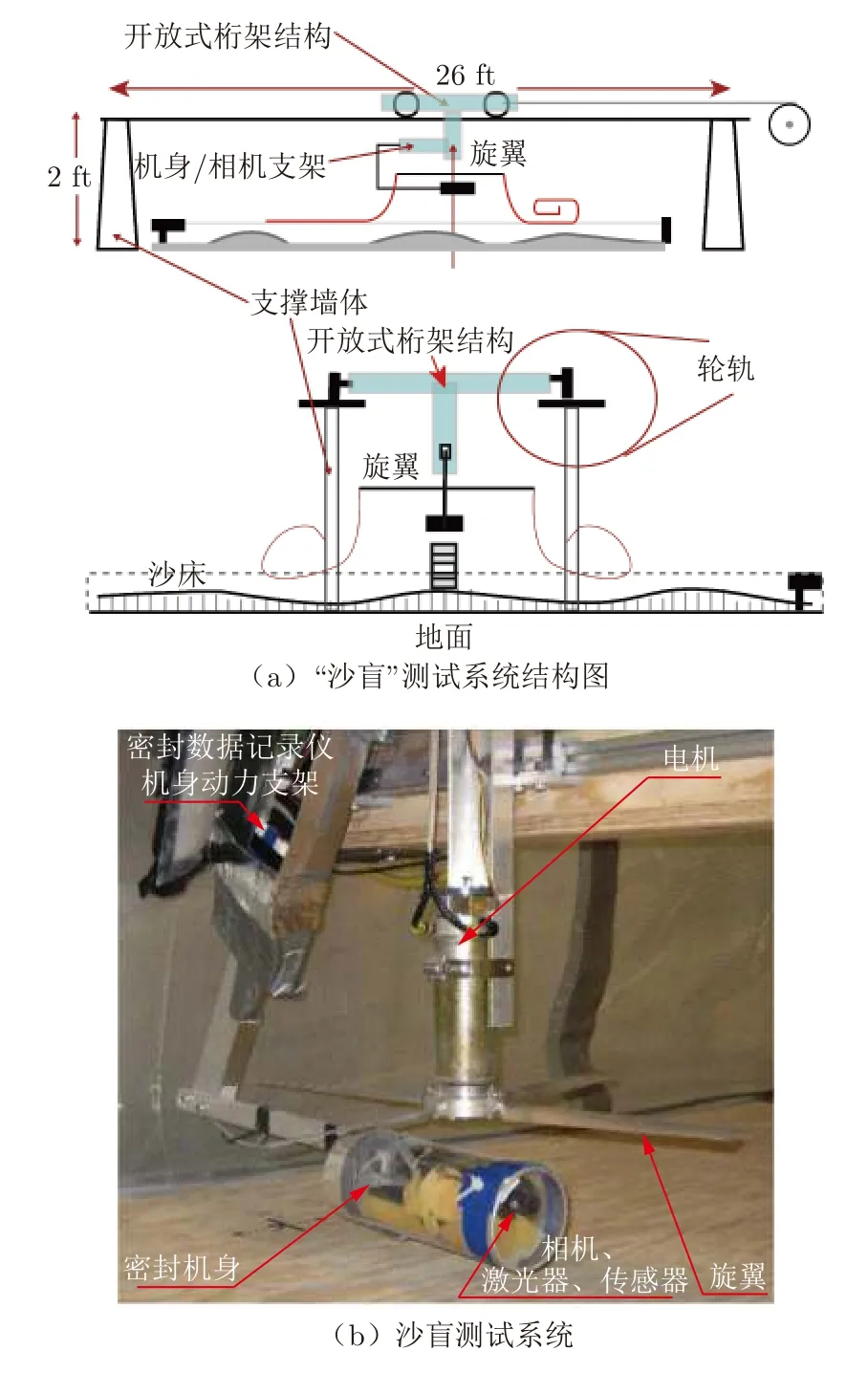
图28 沙盲测试系统[37]Fig.28 Test system for brownout[37]
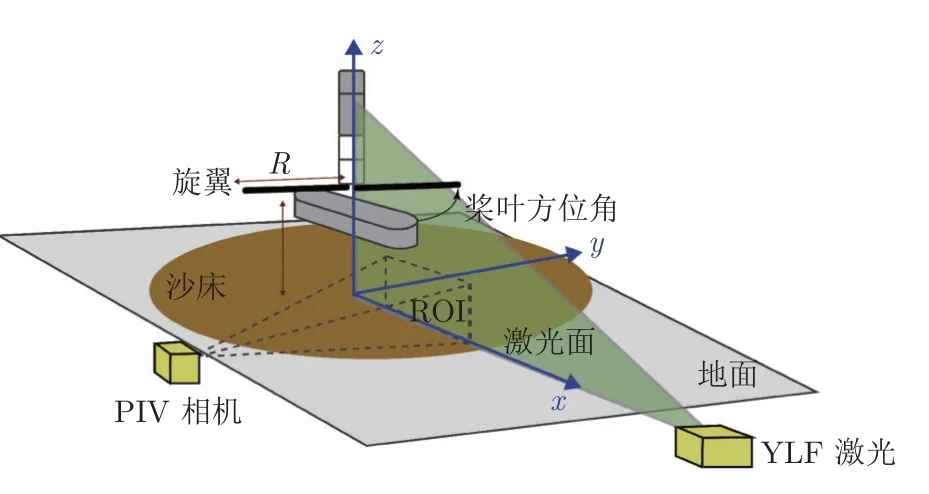
图29 两相流测试系统[63]Fig.29 Test system of two phase flow[63]
飞行试验是另一个重要的试验研究手段。DARPA(Defense Advanced Research Projects Agency)开展了“Sandblaster”项目[66],通过对在机身各部位采集的沙粒情况进行分析,获得直升机悬停–飞行过程中的沙云形态及沙粒粒径分布和沙尘浓度分布。研究结果表明[41,66]:沙云中的沙粒尺度为1~1 000 µm,其中细微沙粒(粒径1~10 µm)含量最高,且在空中悬浮时间更长,是导致能见度恶化的主要因素;质量较大的大尺寸沙粒(粒径100~1 000 µm)含量相对较低(图31)。机身周围沙通量与气流流量之比的平均值小于0.1%,沙粒离开地面后的输运过程可近似为单相流进行分析,从而合理地简化“沙盲”计算。
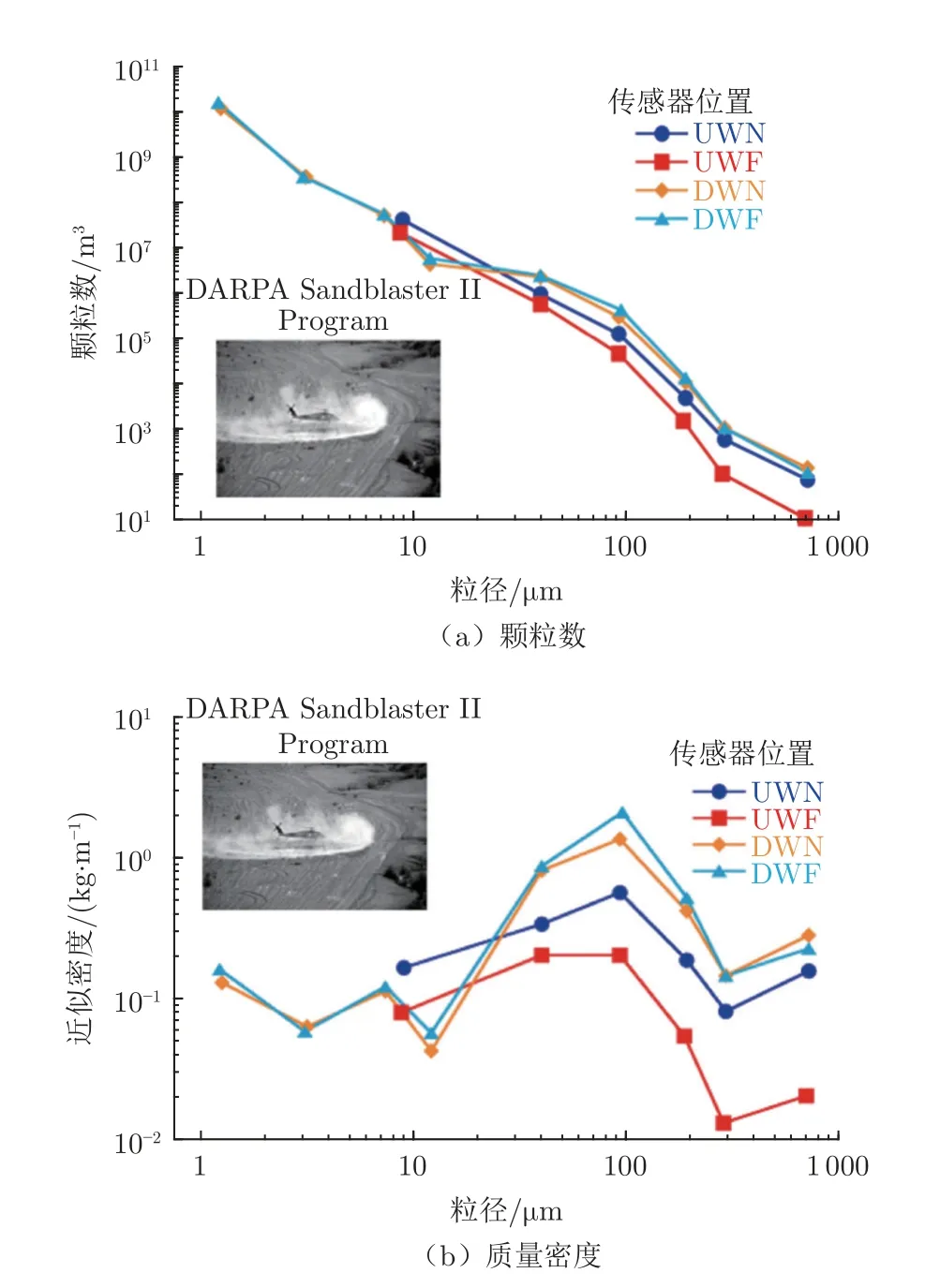
图31 沙云中不同粒径沙粒的浓度及质量密度[66]Fig.31 Concentration and mass density of sand particles of different particle size scales in dust clouds[66]
美国陆军联合研究项目办公室的Tanner 和Wong[67-68]在美国陆军尤马(Yuma)试验场开展了基于 3D –Z( Three Dimensional Landing Zone)的EH–60L 直升机“沙盲”飞行试验,开启了全尺寸直升机“沙盲”飞行试验的先例。美国空军也开展了EH–60L 直升机“沙盲”飞行试验,在试验场布置了多台相机进行拍摄,并对拍摄图像进行了拼接和识别,获得了直升机下降飞行过程中的沙云外轮廓和相对运动速度(图32)。另外,美国最新型CH–53K重型通用直升机还在尤马试验场进行了低能见度环境测试[69]。
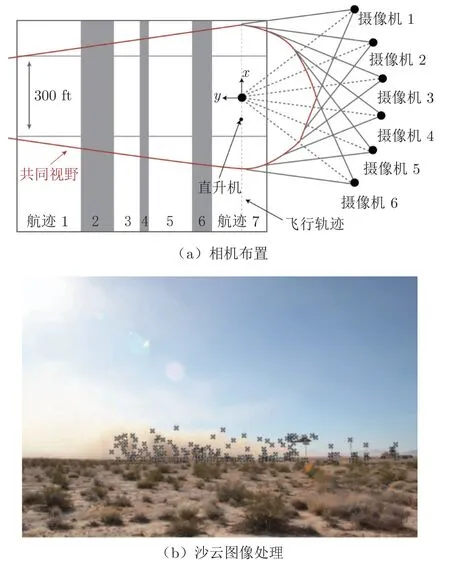
图32 EH–60L 直升机的沙盲飞行试验测试系统[68]Fig.32 Flight test system of EH–60L helicopter brownout[68]
通过直升机“沙盲”试验得到的数据主要为不同试验参数(离地高度、旋翼距离和桨盘载荷等)下沙云中的风沙两相流场数据、沙尘浓度数据和沙粒粒径分布数据[63-66]。为从数据中获取沙云演化过程及沙云与飞行员能见度之间的关系,并将其应用于部分数学模型,需对不同的试验数据分别进行处理。风沙两相流场数据目前大多以PIV 设备获取,采用粒度分辨法或灰度阈值判别法分离粒子图像中的气固两相,分别获取空气和沙粒的运动速度,由气相流场得到旋翼桨尖涡和其他典型涡结构,并对涡核进行识别。沙尘浓度和粒度分布数据反映了沙云强度,可以之建立沙尘浓度和能见度之间的关系,并基于二者最大相关性结果确定最优函数表征。通过测量和分析沙尘浓度的空间分布及其随时间的变化,揭示直升机“沙盲”状态下飞行员视域范围内的沙尘浓度时空演化规律,建立“沙盲”形成的多参数经验预测模型。此外,针对“沙盲”现象拍摄的大视场图像数据[68]主要用于图像拼接和识别,以获取沙云的整体输运演化规律。
3 直升机“沙盲”形成机理研究进展
直升机“沙盲”现象涉及气流与沙粒的两相作用。Leishman 研究团队[60,63-65]基于试验总结了旋翼近地面气流与沙粒两相速度场的演化过程。在地面的干扰作用下,旋翼桨尖涡运动轨迹逐渐扩张、拉伸(与黏性和湍流作用不同,地面附近旋翼桨尖涡的拉伸导致涡量增强)。受到地面扩展边界的约束,旋翼诱导的下洗流逐渐从垂直方向转为水平方向,并在接近地面时产生较强的地面射流(与常规射流相比,旋翼近地面干扰形成的地面射流具有显著的非定常三维特性)。在地面射流作用下,沙床表面沙粒发生滚动,当气流作用力增大,沙粒进入流场,并发生水平径向跃移。在重力作用下,沙粒回落并撞击沙床表面沙粒,溅起更多沙粒。此外,旋翼桨尖涡正下方地面边界层速度增大,地表压强降低,并在斜下方诱发边界层分离和向上的速度场,影响地面边界层特性;同时,产生了沙粒夹带效应,使沙床表面沙粒进入流场,而质量更大的沙粒发生跃移,并在相邻桨尖涡之间形成沙粒堆积。受到旋翼桨尖涡周期特性的影响,相邻的桨尖涡相互缠绕,形成涡对并卷起,最终融合为更大的涡结构。在连续的桨尖涡作用下,被夹带的沙粒逐渐增多,细小沙粒随着旋翼桨尖涡诱发的上洗流向上运动、扬起,形成沙云。
如图33所示,直升机“沙盲”现象涉及沙粒起动的4 类基础过程:1)由地面射流引起的跃移;2)沙粒相互撞击导致的跃移;3)旋涡诱导和负压影响产生的跃移;4)输运过程中涡系诱发上升气流引起的二次跃移。此外,直升机近地干扰流场对沙床的侵蚀会增强近地面的湍流运动,加剧旋涡的互诱导效应,进一步促进沙粒从沙床释放进入空中。
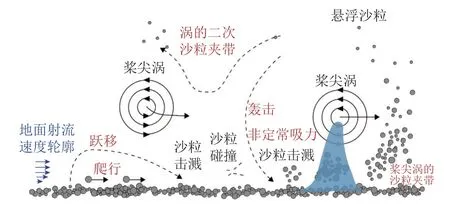
图33 沙粒扬起过程[64]Fig.33 Lifting process of dust particles[64]
直升机“沙盲”试验[63-65,68]和数值模拟[29-30,40-43,47-50,53]研究表明:在旋翼近地面干扰形成的地面射流推动下,沙粒向旋翼外侧运动;同时,沙粒还受到了旋翼桨尖涡的诱导作用。旋翼桨尖涡正下方流动速度较快,沙粒运动速度也较快,而桨尖涡之间的沙粒受流场作用发生跃移,并在沙粒碰撞作用下停止运动,堆积于旋翼桨尖涡之间,而旋翼桨尖涡处则形成明显的“空白区”。在旋翼桨尖涡的连续作用下,堆积的沙粒被桨尖涡夹带进入流场,向上运动、扬起。受地面射流和桨尖涡作用,细小沙粒的扬起高度增大,并沿着旋翼速度场运动。在重力和流体力作用下,沙粒向旋翼上方和内侧运动,逐渐形成沙云并越来越明显,逐渐包围直升机,形成典型的“沙盲”现象。
直升机悬停状态下的沙云水平截面呈类圆形,而直升机前飞状态下的沙云水平截面则呈明显的类椭圆形。直升机起飞、悬停和降落时,旋翼产生的非定常下洗流与地面干扰,形成地面射流、上洗流和回流等复杂流动,导致沙粒迁移、聚集、起跳、扬起,形成沙云,并在旋翼流场作用下悬浮、回流,最终导致“沙盲”现象(图34)。
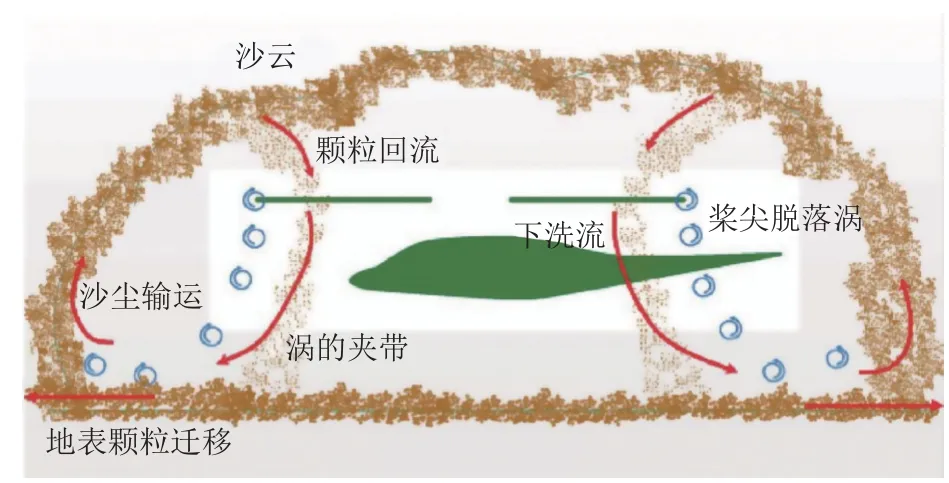
图34 “沙盲”现象的流场与沙尘特性示意图[54]Fig.34 A schematic of characteristics of flow field and sand dust in brownout phenomenon[54]
国内外研究者采用数值模拟和试验手段开展了直升机“沙盲”现象形成机理研究,但主要针对直升机稳定悬停状态,尚未涵盖直升机沙地起降的平飞和下滑等过程,旋翼桨尖涡与地面干扰形成的复杂流动驱动沙粒迁移的机理也亟待开展研究。沙粒在沙床表面的迁移过程中如何起跳、扬起形成沙云,沙云如何演化发展为“沙盲”,“沙盲”如何维持、衰减等问题仍未完全明确。
4 直升机“沙盲”抑制方法研究进展
近年来,欧美直升机研究机构提出了旋翼系统改进、飞行策略优化、预警和辅助系统、喷洒液体或聚合物等多种可能抑制直升机“沙盲”现象的方法。
4.1 旋翼系统改进
为提高直升机在高含沙量地域下的起降安全性,各直升机研发强国已将直升机旋翼的“沙盲”抑制能力提升至与旋翼性能和噪声抑制同等重要的地位。
基于直升机“沙盲”影像资料[69],研究者对比了不同型号直升机“沙盲”现象的形成速度及沙尘浓度、沙云尺度(图35)。研究结果表明:“沙盲”现象的强度受旋翼桨盘载荷、尾流强度、平均下洗速度、旋翼大尺度回流减缩频率等因素影响;采用减小桨盘载荷的方法可以降低“沙盲”现象的强度。该方法主要基于降低旋翼下洗流对地面冲击强度的思路。但是,减小旋翼桨盘载荷,将会增大旋翼尺寸,并带来旋翼结构和旋翼重量等一系列新问题,这一思路很难运用于实际设计。

图35 基于平均下洗速度与尾流强度衡量直升机沙盲严重性[69]Fig.35 Levels of brownout for different types of helicopters based on the average downwash speed and wake intensity[69]
随着直升机“沙盲”形成机理研究的深入,研究者认识到旋翼桨尖涡在近地面沙粒的扬起过程中发挥着重要作用,因此采用了各种设计来控制旋翼桨尖涡强度。Milluzzo 等[5]对比了不同桨尖构型的旋翼在悬停地面效应下的桨尖涡结构及其演化特性,发现前突后掠型桨尖能显著降低桨尖涡强度,并加速桨尖涡耗散(图36),这种效应能够降低近地面层聚集的桨尖涡涡量,从而对沙云的激发过程起到抑制作用。

图36 矩形桨叶与前突后掠型桨尖桨叶的桨尖涡结构对比[36]Fig.36 Comparison of tip vortex structure between rectangular blade and swept blade[36]
Whitehouse 等[70]以降低桨尖涡强度为优化目标,对UH–60A“黑鹰”直升机旋翼开展了优化设计。下降飞行状态下,优化旋翼和基准旋翼形成的沙云对比分析表明,以桨尖涡强度为优化目标的设计思路能够显著降低沙尘浓度(图37)。

图37 UH–60 直升机基准旋翼和优化旋翼在下降飞行状态下形成的沙云特性[70]Fig.37 Sand cloud characteristics in descending flight for UH–60 benchmark rotor and optimized rotor[70]
基于上述研究,欧美多款典型直升机在“沙盲”抑制方面取得了较好的工程应用效果。受益于独特的第4 代BERP 旋翼设计(图38),意大利与英国联合研制的14 吨级中型多用途直升机EH–101 显示出较强的“沙盲”抑制效果,沙云远离直升机且沙尘浓度显著降低,提高了在沙漠地区的起降安全性[71]。采用新旋翼的直升机在21 500 次沙漠起降中均未出现明显“沙盲”现象[71],在伊拉克表现出优秀的出勤率。在EH–101 直升机的基础上,美国、英国、法国组成的联合团队开发了美国空军下一代作战搜索与救援(CSAR)直升机及美国总统专用直升机“海军陆战队1 号”(US–101 直升机)。
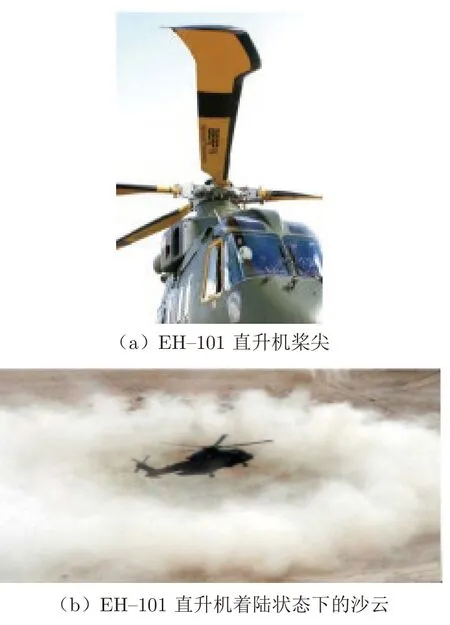
图38 EH–101 直升机旋翼与沙云抑制效果[71]Fig.38 EH–101 helicopter rotor and suppression effect of dust cloud[71]
为提升现役直升机的“沙盲”抑制能力,英国针对海军和空军的S–61 直升机升级开发了具有尖削、后掠、先进翼型、大扭转特征的新型旋翼,提升了起降飞行过程中的能见度,同时保持了较好的重载飞行性能[72],在阿富汗表现出较好的“沙盲”抑制能力(图39)。

图39 英国S–61 直升机换装的旋翼与沙盲云[70]Fig.39 Rebladed British S–61 helicopter and brownout cloud[70]
4.2 飞行策略优化
欧美直升机强国高度重视沙尘环境下直升机安全飞行策略(覆盖了飞行训练、飞行程序、任务规划等环节)开发,通过开展飞行员虚拟仿真培训,减少“沙盲”环境下的飞行事故。Keller 等[15]将基于自由尾迹模型的CHARM 软件和基于拉格朗日体系的可视化模型LDTRAN 耦合,开发了“沙盲”现象模拟器。D'andrea 等[38]将基于自由尾迹的ADPANEL–RAS 软件和基于沙粒输运模型的ADPANEL–PTM 软件嵌入飞行模拟器中,开展了“沙盲”现象模拟器研究。美国ART 公司开发了“沙盲”现象模拟器,为沙尘环境下的飞行训练提供训练手段。
模拟器获得的特定飞行策略会受到沙床和未沙化地面类型的影响,且模拟结果与直升机型号密切相关。此外,为保证“沙盲”模拟结果的实时性,欧美现有模拟器采用的“沙盲”现象模型仍然非常简单,缺少“沙盲”形成的详细过程,且难以精确模拟直升机接近地面时的复杂流场、周围环境、直升机机动状态及复杂沙床表面等因素对“沙盲”现象的影响。
基于军用直升机在阿富汗、伊拉克等地的飞行安全和出勤率要求,北约针对沙地等低能见度环境(DVEs)制定了直升机降落程序[73],以尽量降低“沙盲”现象对飞行员驾驶能见度的影响(图40)。
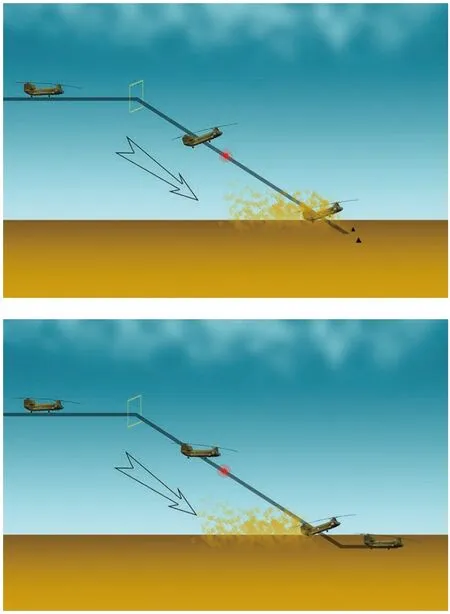
图40 直升机在低能见度环境中的降落程序示意[73]Fig.40 Helicopter landing procedure in degraded visual environments[73]
在飞行任务规划方面,美国沙漠研究所(Desert Research Institute,DRI)开发了着陆场“沙盲”风险预警系统。该系统可根据直升机型号、进场路线,以及着陆场的风速、风向、表面粗糙度、沙粒性质、含水量等信息,综合判断着陆场中各着陆点发生“沙盲”现象的风险等级。
4.3 预警和辅助系统
多家研究机构也尝试通过开发新传感器和先进驾驶舱显示技术,组成预警和辅助系统(图41),增强飞行员感知“沙盲”现象的能力,降低起降风险。H.N.Burns 工程集团( H.N.Burns Engineering Corporation)、美国空军研究实验室(U.S.Air Force Research Laboratory,AFRL)和美国陆军航空、导弹研发与工程中心(U.S.Army Aviation &Missile Research,Development and Engineering Center,AMRDEC)联合开展了3D–LZ(Three Dimensional Landing Zone)项目,开发可视化系统,用于提供着陆区感应、导航和障碍物规避等[74-75]。美国陆军航空飞行动力学理事会(U.S.Army Aeroflightdynamics Directorate,AFDD)联合英国BAE 系统公司开展了“沙盲”辅助着陆技术(Brownout Landing Aid System Technology,BLAST)研究,升级了“沙盲”指引系统BOSS(BrownOut Symbology System)[76],研究结果表明此类系统仍存在一定的鲁棒性问题以及导致飞行员和发动机在“沙盲”中暴露时间过长等问题[77]。加拿大国防部联合Neptec 公司开发了模糊穿透同步激光雷达,以辅助飞行员在“沙盲”环境下完成直升机起降[78]。美国陆军研发与工程司令部(U.S.Army Research,Development and Engineering Command,RDECOM)开展了低能见度环境抑制项目[79-80],以辅助飞行员在“沙盲”环境下安全着陆,但研究中发现因沙尘侵蚀导致传感器导引系统误报,且误报率高达40%左右。
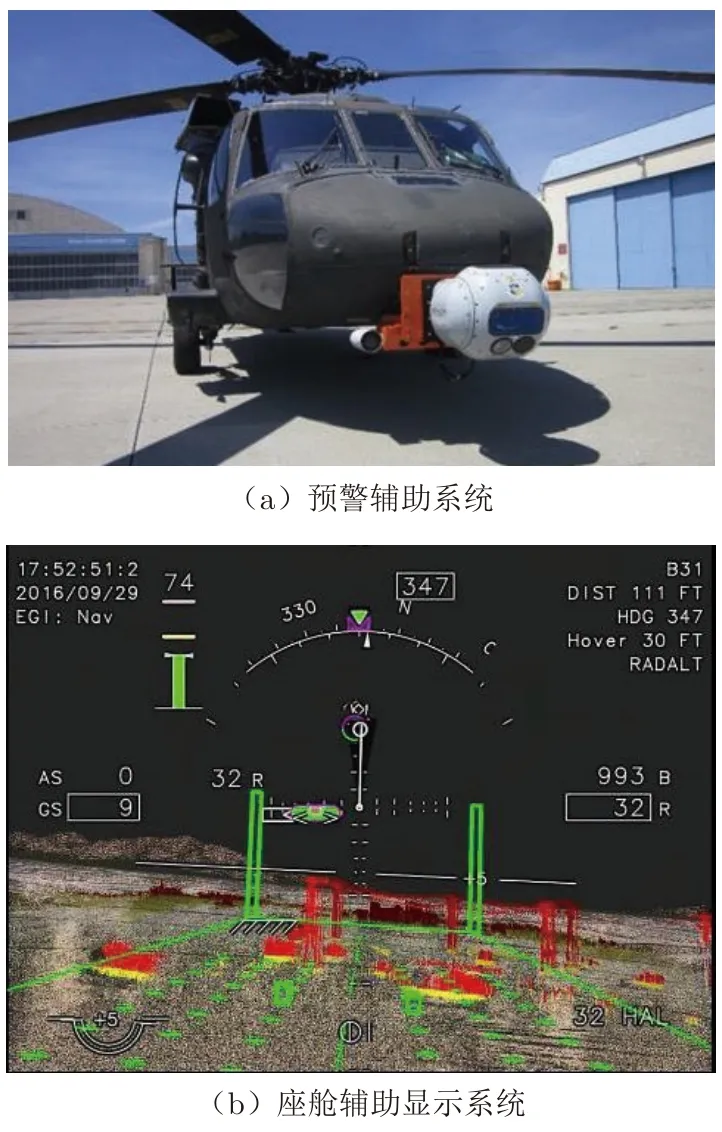
图41 EH–60L 直升机“沙盲”预警和辅助系统[75]Fig.41 Early warning auxiliary system of brownout in EH –60L helicopter[75]
总体而言,预警和辅助系统不能降低直升机周围的沙尘浓度、缓和沙粒对高速旋转桨叶的冲击,无法从流场源头上抑制“沙盲”现象,直升机和驾乘人员仍然会受到“沙盲”现象影响。
4.4 喷洒液体
在直升机着陆区喷洒液体或聚合物,阻止沙尘跳跃和漂浮,从而形成典型的半永久性停机坪,是一种多应用于燃料补给站的“沙盲”直接抑制方法。但是,该方法易使直升机暴露于敌方火力之下,并不适合用于战术任务中的临时着陆区;同时,该方法要求直升机携带数吨液体或聚合物,增加了直升机改装成本,并严重限制了可携带的任务载荷。
抑制“沙盲”,是在不明显降低直升机性能、增大飞行员负荷和飞行难度的前提下,使飞行员能够清楚观察着陆点和周围环境,同时减少沙尘对直升机核心部件的损伤。因此,从“沙盲”源头上改变直升机复杂流场、抑制沙云形成及演变的旋翼设计和飞行策略优化方法,是抑制“沙盲”现象更为有效的途径。
5 结论和展望
本文从直升机“沙盲”计算方法、试验方法、形成机理、抑制方法等方面进行了综述,得到如下结论:
1)面向直升机贴地飞行“沙盲”现象的计算分析需求,采用涡方法或CFD 方法可分析直升机近地干扰非定常流场。涡方法能较好地捕捉近地面的旋翼桨尖涡缠绕、地面射流和上洗流等特性;CFD 方法能较好地模拟旋翼近地面干扰的复杂流场结构。采用涡方法或CFD 方法都仍需考虑起伏不平的沙床表面及沙床近壁边界层脉动湍流作用。
2)耦合拉格朗日沙粒跟踪方法和涡方法(或CFD 方法)的直升机“沙盲”计算方法,能够模拟沙粒空间运动轨迹、沙云轮廓和“沙盲”现象,但仍需进一步考虑沙粒迁移、聚集、起跳、扬起等关键因素。
3)采用高速PIV 和相机搭建的“沙盲”试验系统,可获得沙粒运动轨迹和沙云形态数据,但需进一步发展沙云两相流测试技术和沙尘空间浓度分布测试技术。
4)近地流场由旋翼下洗流、旋翼桨尖涡和地面涡主导,产生地面射流、剪切流等复杂流动,诱发沙粒迁移、聚集、起跳、扬起等复杂运动,最终形成“沙盲”。旋翼桨尖涡与地面干扰形成的复杂流动对沙粒的驱动机制,沙粒跳跃、扬起等动力学行为,沙云形成过程,沙云演化、维持和衰减机理等都仍需进行深入研究。
5)旋翼系统设计、飞行策略优化、预警和辅助系统等能降低“沙盲”现象对直升机飞行安全的威胁。从源头上改善直升机近地流场、抑制沙云形成及演变的旋翼设计和飞行策略优化方法是抑制“沙盲”现象更为有效的途径。
可从3 个方面深入开展直升机“沙盲”现象研究:
1)在直升机“沙盲”计算方法方面,重点研究直升机近地面飞行状态下旋翼桨尖涡与地面边界层非定常干扰诱发的气流分离与脉动湍流、考虑沙粒碰撞特性和脉动湍流诱发起沙的沙粒动力学模型及“沙盲”计算方法等。
2)在直升机“沙盲”试验方面,重点研究直升机近地面干扰非定常流场下的沙粒起动、涡的沙粒夹带精细测量技术,基于三维视觉的“沙盲”形态捕捉重构技术,以及沙尘空间浓度分布的高精度实验测试技术。
3)在直升机“沙盲”抑制方面,以对直升机“沙盲”现象机理的认识为基础,结合直升机“沙盲”计算方法和试验测试技术,开展面向未来新型直升机的旋翼系统抑沙设计技术研究及面向现役直升机抑沙的飞行策略规划与飞行轨迹优化技术研究。
