基于模型预测控制的智能网联车队异步避障策略
2023-12-04彭利明魏子淳白先旭
彭利明, 孙 骏, 魏子淳, 白先旭
(1.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009; 2.南加利福尼亚大学 维特比工程学院,美国 洛杉矶 90089)
随着全球汽车保有量的不断增加,有限的道路交通资源导致交通拥堵和交通事故现象频发,智能网联汽车技术的发展为解决这一问题提供了可行的途径[1]。作为智能网联汽车技术的典型应用,智能网联汽车编队行驶实现了车辆以较小间距稳定行驶的功能,极大地提高了道路的通行率,有效减少了车载能源的消耗,这将是未来智能交通系统中不可或缺的一环[2]。然而,较小的车间距离意味着更高的行车风险,如何保障智能网联车队的行驶安全性是当前智能网联车队控制技术的核心问题[3]。
为保证智能网联车队行驶时的线性稳定性,国内外学者开展了深入的研究。针对异质车队存在模型不确定性及恒定通讯延迟的情况,文献[4]设计了H infinity鲁棒控制器,以保证车队行驶时的线性稳定性;文献[5]基于滑模控制理论设计了一种适用于商用半挂车队行驶的协同自适应巡航控制算法,有效地增强了车队的稳定性和安全性。为解决异构车辆队列的纵向稳定性控制,文献[6]提出了一种基于非直联通信拓扑的分布式模型预测控制(model predictive control,MPC),并将各控制器的代价函数和作为Lyapunov函数,证明其稳定性。
但是现有文献基本是对智能网联车队的纵向跟随控制进行研究,而针对复杂场景的驾驶安全性而言,仅仅保证队列的纵向稳定性是不够的,还需要进行车队的横向控制[7]。考虑到车队控制是多目标控制问题,需要满足车辆行驶的平顺性以及复杂场景驾驶的安全性,同时还受到能量消耗、车辆动力学等因素的限制[8],如车辆的纵向力应受到轮胎附着极限的约束。
为了解决智能网联车队规避障碍物时的横向控制问题,本文提出一种基于MPC的智能网联车队异步避障策略。建立周围交通参与者和道路的势场,综合考虑期望车道、期望速度以及车辆动力学限制,运用MPC理论进行最优轨迹规划,以实现障碍物规避,其中智能网联车队采用异步避障策略来降低行车风险以及道路的占用面积;通过MATLAB/Simulink与TruckSim的联合仿真,在不同的避障场景中对比车队的同步避障策略与异步避障策略的性能表现,以证明本文所提方法的可行性和优越性。
1 模型预测控制下的异步避障策略
1.1 单车数学模型及队列跟随策略
为了简化模型并提高计算速度,通常选用三自由度动力学模型来模拟单车动力学[9],如图1所示,其动力学方程表示如下:

图1 三自由度模型

(1)
(2)
(3)
(4)
(5)
(6)

为引入前轮转向系统,采用线性轮胎模型,则车辆侧向力[10]可以表示为:
(7)
(8)
其中:Caf、Car分别为前、后轮的侧偏刚度;af、ar分别为前、后轮的侧偏角;δ为方向盘转角。

xt+1=Axt+Buct
(9)
yt=Cxt
(10)

采用前车跟随策略(Predecessor Following)[11]进行目标车速设计:
(11)

接收来自全局规划的目标车道信息,并由感知模块获得速度信息,可得到目标输出矩阵:
(12)
1.2 人工势场理论
为实现对于周围交通参与者和道路的风险量化,本文引入人工势场理论[12]。通常对不可跨越障碍物、可跨越障碍物和道路边界3类事物进行人工势场建模,以帮助车辆进行障碍物的规避。总体的人工势场可以表示为:
U=∑UNC+∑UC+∑UR
(13)
不可跨越障碍物包括车辆和行人等,此类人工势场是以自车相对于障碍物的安全距离si为自变量建立的[13],即
(14)
(15)
(16)

可跨越障碍物包括减速带及一些道路垃圾等,此类人工势场可定义为:
(17)
道路边界包括车道线和道路隔离带,应防止车辆越过道路隔离带,并保证车辆在非变道时保持在同一车道。因此此类人工势场采用二次函数的形式进行定义:
(18)
其中:SR为车辆距离道路边界的安全距离;Da为车辆与道路边界的许可距离。
1.3 模型预测控制
面向自动驾驶的模型预测控制MPC通常包括基于运动学模型和基于动力学模型2种方式。智能网联车辆不同于室内轮式机器人,它更多是以较高的速度在复杂的交通场景中行驶。精确的动力学模型可以提高智能网联车辆在高速行驶时的可靠性。
本文运用基于三自由度动力学模型的MPC来解决智能网联车队面临的多目标控制以及避障规划的最优化问题。
考虑车辆纵向平顺性及法规,引入约束:
(19)
|δ|≤δmax
(20)
(21)
Fx≤Fx_max
(22)

轮胎纵、横向力应符合附着椭圆,故引入约束:
(23)
其中:Fy*为前轴或后轴的侧向力,*表示f或r;Fy*_max为前轴或后轴的最大侧向力。
综上所述,最优化问题可以表示为:
(24)
s.t.
xt+k,t=Axt+k-1,t+Buct+k-1,t
(25)
yt+k,t=Cxt+k,t
(26)
yst+k,t=Csxt+k,t+Dsuct+k,t
(27)
yst+k,t≤ysmax+εk
(28)
εk≥0
(29)
ucmin≤uct+k-1,t≤ucmax
(30)
ucmin≤uct+k-1,t-uct+k-2,t≤ucmax
(31)
uct+k,t=uct+k-1,t,k>Nc
(32)

智能网联车队存在同步和异步2种避障策略。同步避障策略是指在避障过程中车队内的车辆保持一致运动,同时进行避障;而异步避障策略是指在避障过程中车队内的车辆依次独立完成避障任务,而后再组成队列行驶。为降低行车风险以及道路的占用面积,本文采取基于MPC的异步避障策略进行车队的避障规划。
2 仿真验证
目前智能网联汽车编队行驶技术通常用于专用化程度高的运输工作中,如矿区工作车、港口运输车以及高速货运车辆等[15-17]。因此,本文运用箱式货车作为仿真对象,通过MATLAB/Simulink与TruckSim联合仿真,设计并分析了2个典型避障场景。联合仿真框架图如图2所示。
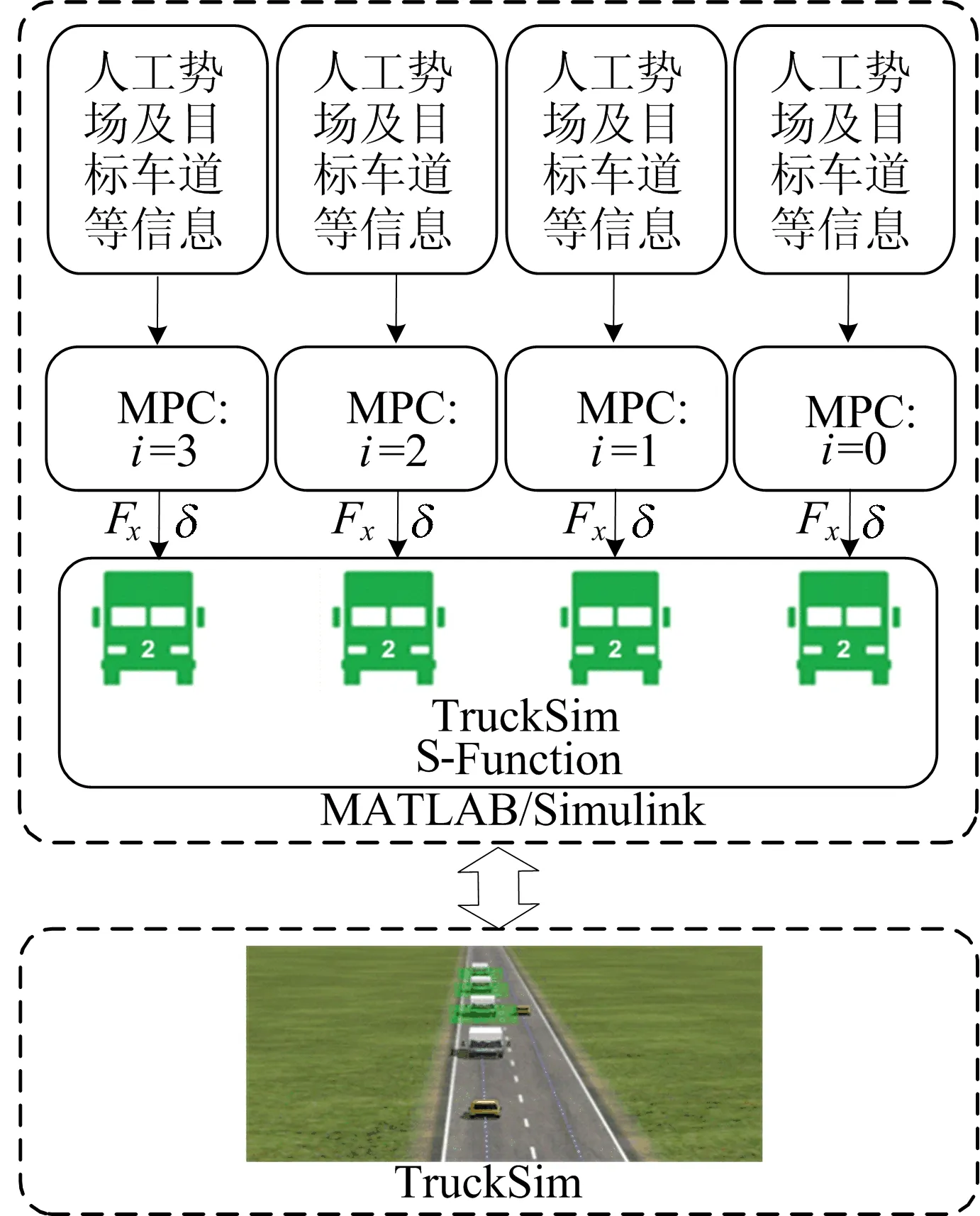
图2 联合仿真框架图
2.1 单障碍物避障场景
本场景模拟现实中的智能网联车队变道超车的过程,车队由4辆商用车组成,障碍物车辆以54 km/h的速度行驶在第1车道。在期望车间距为50 m的条件下,智能网联车队以65 km/h的初始速度行驶在第1车道,碰到行驶缓慢的障碍物车辆后进行变道超车。
单障碍物避障场景示意图如图3所示。单障碍物避障场景中不同避障策略的运动轨迹如图4所示。
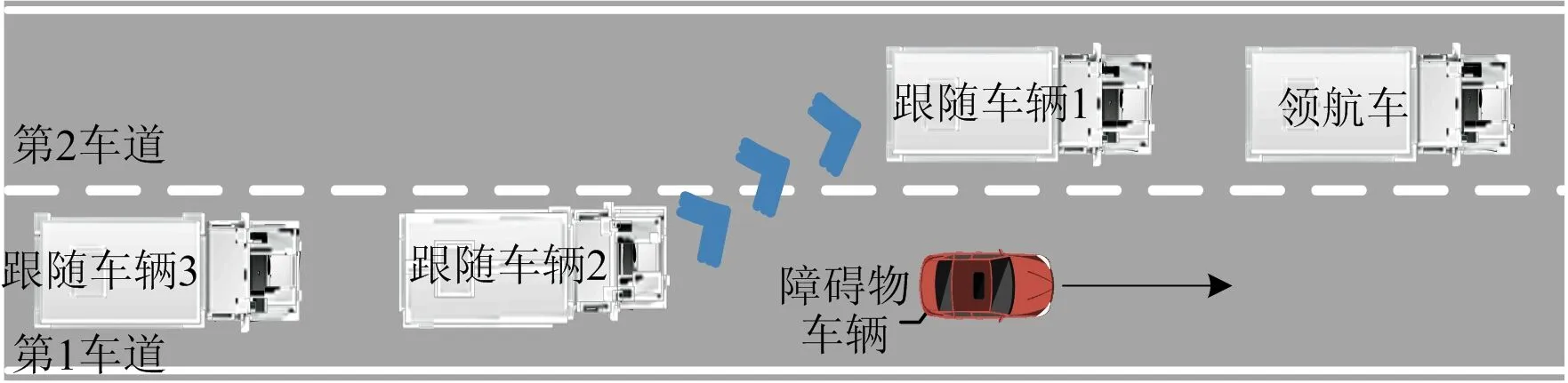
图3 单障碍物避障场景示意图

图4 单障碍物避障运动轨迹
由图4a可知,在异步避障策略下,智能网联车队中的每辆车在遇到障碍物车辆之后依次进行避障规划,所有车辆在保持一定安全距离的情况下顺利地完成了变道超车,并且在同一时刻下,车队变道所占用的纵向空间在20~30 m之间。由图4b可知,在同步避障策略下,当领航车遇到障碍物车辆而进行避障动作时,后方车辆跟随领航车同时进行横向运动,此时车队能够顺利完成避障任务,但是同一时刻下车队变道所占用的纵向空间为180~200 m之间。
相较之下,同步避障策略车辆占用的道路为异步避障策略车辆的6~9倍,而且当目标车道同时存在其他障碍物车辆时,由于横、纵向跟随要求与横向安全冲突,同步避障策略车队的行车风险将会增大。


图5 单障碍物避障距离误差
由图5可知,在不同避障策略下,整体的距离误差保持在1 m以下,并且当各车完成避障任务后,距离误差最终能够实现渐进稳定。仿真结果表明,基于MPC的方法能够保证队列在避障时的纵向线性稳定性。
2.2 多障碍物避障场景
本场景模拟智能网联车队的变道超车过程中目标车道前方存在其他障碍物车辆的情况。障碍物车辆1以54 km/h的速度行驶在第1车道,同时前方的障碍物车辆2以61 km/h的速度行驶在第2车道。在期望车间距为50 m的条件下,智能网联车队以65 km/h的初始速度行驶在第1车道。车队对障碍物车辆1完成超车后,由于障碍物车辆2的阻碍,为减少并行时间,车队将返回第1车道。多障碍物避障场景示意图如图6所示。

图6 多障碍物避障场景示意图
多障碍物避障场景中不同避障策略的运动轨迹如图7所示。

图7 多障碍物避障运动轨迹
由图7a可知,领航车在变道规避障碍物车辆1后,在目标车道前方遇到障碍物车辆2,为减少与障碍物车辆1的并行时间,领航车需要变道返回第1车道,在异步避障策略下,车队有序完成多障碍物车辆的避障任务,并减少了道路面积的占用,提高了行车安全性。
由图7b可知,在同步避障策略下,由于后车对于前车的横向运动跟随,后车在不需要避障的情况下会出现多次的变道,而且无效变道减少了自车与障碍物的纵向距离,当后车真正需要避障时,所剩不多的纵向距离将极大地增加车队的行车风险。
多障碍物避障场景中不同避障策略的跟车距离误差变化情况如图8所示。

图8 多障碍物避障距离误差
由图8a可知,在多障碍物避障过程中,异步避障策略能够将跟车距离误差维持在0.8 m以内,而且当整体车队完成避障后,距离误差能够实现渐进稳定。由图8b可知,同步避障策略下,领航车与跟随车辆1之间在37.5 s出现一个较大的峰值,这是由于跟随车辆1发生无效变道后,随即遇到障碍物车辆1而进行避障所产生的距离误差脉冲。
相较之下,异步避障策略能够以较小的距离误差有序安全地完成多障碍物避障。
3 结 论
为解决智能网联车队规避障碍物时的横向控制问题,提升智能网联车辆队列的行驶安全性,本文提出了一种基于MPC的智能网联车队异步避障策略。
1) 通过建立周围交通参与者以及道路的人工势场,并综合考虑期望车道、期望速度以及车辆动力学约束,建立基于MPC的智能网联车队异步避障策略模型。
2) 基于MATLAB/Simulink与TruckSim的联合仿真,在不同避障场景下对比和分析了异步避障策略与同步避障策略的性能表现。在单障碍物避障场景中,异步避障策略能够有限地进行避障规划,并且保持车队整体的线性稳定性;同时,与同步避障策略相比,异步避障策略能够减少6~9倍的纵向道路面积需求。在多障碍物避障场景中,同步避障策略出现了跟随车辆的无效换道,增加了智能网联车队的行车风险。相较之下,异步避障策略能够在保证较小距离误差的同时,有序地进行避障规划,有效地提升了智能网联车队的行驶安全性。
